前言
无人四旋翼飞行器的发展已经有很多年的历史,一开始因为受科技的限制和组件取得的不易,所以大部分使用在军事等特殊方面,但随着时代的变迁,无人四旋翼飞行器的应用不再只是局限在一些特殊方面,也可适用于一些民生用途如空拍导航、地形侦查。
四旋翼飞行器它能够直接的垂直起飞及降落、可以立刻变换飞行姿态及路径、可在空中随意定点旋停等优势,是一般的定翼飞机所无法做到的,但是相对的由于需要同时控制四颗马达,容易造成飞行时的不稳定,所以本研究利用微制程之惯性组件来量测飞行姿态的变化,并加以回授控制使四旋翼飞行器能够稳定,虽不如真实飞机及军事系统那样的精密准确,还须适时的修正误差,但取得价格相对较便宜,使用于在一般民生用途上则已足够,本研究从基本电子电路开始着手,到完成整个控制系统硬件部分,最后实际测试飞行控制板的控制结果。
四旋翼飞行器主要是利用四颗马达来带动螺旋桨产生的浮力,使得四旋翼飞行器能于空中飞行,但螺旋桨的转动会产生作用力与反作用力以及一些旋转的惯性,而当飞行于室外时,也会因为气流和风势的影响,这些都会是造成四旋翼飞行器飞行时不稳定的因素。
所以用户在使用四旋翼飞行器时,必须要全神贯注,注意四旋翼飞行器的姿态、航向、转向,并且随时都要利用遥控器修正来稳定四旋翼飞行器,所以在使用上,用户几乎都需要一些时间来训练,才能熟悉的操控且稳定的控制四旋翼飞行器。
本研究以四旋翼飞行器为平台,以飞行控制系统微型化、功能模块化以及能达到自主平稳飞行为研究目的。利用核心控制器和惯性传感器的硬件系统整合,就能够实时量测到四旋翼飞行器的航向、俯仰、侧滚等信息,再透过控制核心作运算处理,并回授矫正误差值,最后输出讯号控制马达动作,如此一来四旋翼飞行器便能平稳的飞行与保持固定的航向。
工作原理
控制核心
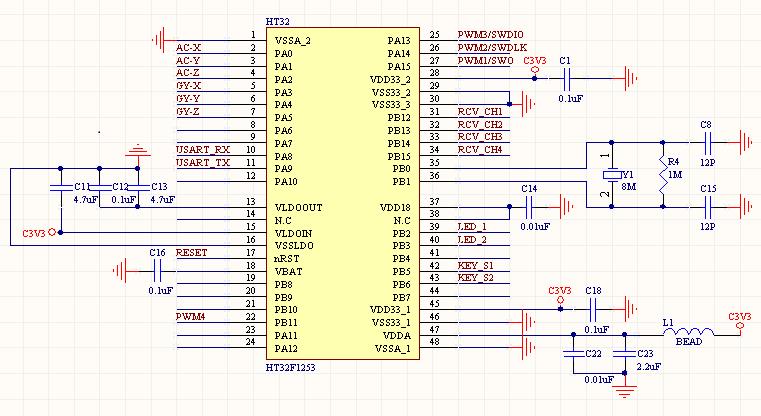
本系统所选用的控制核心为盛群半导体所生产的HT32F1253微控制器,本芯片为新型的32-bit微控制器,晶体震荡器选用8MHz,内部倍频至72MHz,因此每个机械指令周期为0.0138μs。
HT32F1253微控制器内含八信道的ADC,其分辨率为12-bit,负责转换姿态传感器所回传的模拟讯号,PA0~PA2为加速度计X、Y、Z三轴的讯号输入,PA3~PA5为陀螺仪X、Y、Z三轴的讯号输入;两组通用定时器(GPTM),本系统利用GPTM0产生PWM控制讯号,经由PB11、PA13~PA15输出送至马达驱动器,控制四旋翼飞行器的直流马达;GPTM1则是负责接收来自用户的控制讯号,控制讯号经由接收器转换为PWM讯号输入由PB12~PB15输入至微控制器;一组USART接脚用于数据传输,PA10、PA11为USART所使用的RX、TX,微控制器可透过USART将飞行控制系统的数据送至PC显示。
姿态感测
本作品的感测系统是由三轴加速度计(MMA7260Q)、单轴陀螺仪(ISZ-650)量测与双轴陀螺仪(IDG-650)所组成,主要测量飞行器的重力与角速度的变化,供控制核心(HT32F1253)进行计算以求得飞行姿态。感测系统架构由图1所示:
加速度计主要测量飞行器X、Y、Z轴的重力变化,计算飞行器飞行时的倾斜与测滚。飞行器飞行时进行前倾、后仰或侧滚翻时,一定会产生重力的变化,因此我们可利用加速度计进行量测,并计算出飞行器的角度。
陀螺仪又名角速度计,为角惯量传感器,用于感测物体围绕某个轴发生的旋转,测量以度/秒(°/s)为单位的角速度;陀螺仪与加速度计不同的是,陀螺仪量测飞行器的偏行或者斜度时,与地心引力或者飞行速度无关,且陀螺仪可侦测物体水平旋转的角速度,但无法侦测飞行器的水平移动速度,所以若将陀螺仪和加速度计结合起来,就能够做出侦测飞行器转动与倾斜的传感器。
飞行控制系统透过加速度计与陀螺仪的量测,可得到四旋翼飞行器的飞行姿态,飞行姿态以尤拉角表示,其中定义俯仰角(Pitch Angle)为绕着x轴所产生的夹角?,侧滚角(Roll Angle)为绕着y轴所产生的夹角O,以及航向角(Yaw Angle)为绕着z轴的夹角ψ,如图2所示:
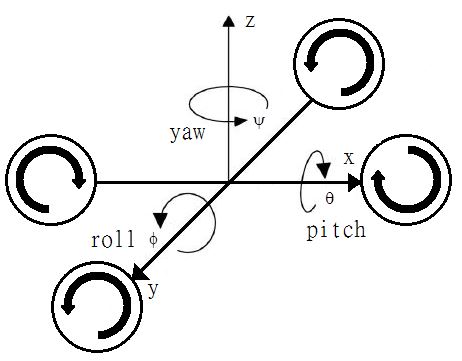
| 图二: 四旋翼飞行器之Pitch、Roll、Yaw示意图 |
|
飞行原理
一般旋翼机是由升力、重量(重力)、推力、阻力间的平衡来控制飞行器的姿态,四旋翼飞行器的飞行原理亦同于一般旋翼机,本飞行器事由四个直流马达带动螺旋桨,透过调整马达的转速,可使螺旋桨产生不同的升力,进而达到上升、下降、前进、后退、左移、右移以及定点旋转等不同的飞行方式。
一般旋翼机是使用可变倾角的正向螺旋桨,来控制姿态的改变,但四旋翼飞行器必须使用两组正桨与两组反桨,依照正反桨转动的方向和转速来控制飞行时的姿态。
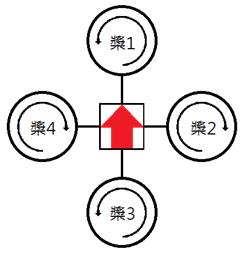
本研究使用两组正桨、两组反桨,若四组螺旋桨都往同一个方向转动,就会造成极大的惯性,使机身朝螺旋桨转动的反方向不断旋转,所以在设计上对称的两个螺旋桨必须朝着各自不同的方向做旋转以抵消旋转所产生的惯性。四旋翼飞行器螺旋桨旋转方向示意图如图3所示:
飞行控制方法
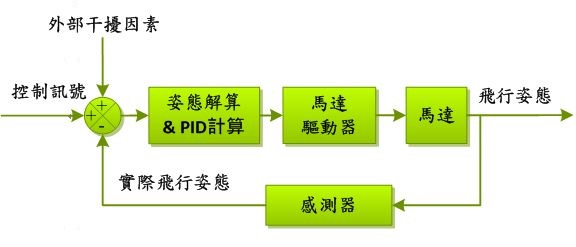
四旋翼飞行器主要是依照遥控器的指令动作,遥控器可操作四旋翼飞行器的起飞、降落、侧翻、俯仰,遥控器的控制讯号有副翼(Aileron)、升降舵(Elevator)、油门(Throttle)、方向(Rudder),飞行控制板上装有RF接收器接收遥控器讯号,当飞行控制板接收到遥控器讯号时,飞行控制板上的微控制器会将控制讯号与传感器讯号做融合,计算出用户的期望姿态,再与目前姿态计算出所需的修正量,最后将修正量转换为PWM讯号,交由马达控制器改变相对应的马达转速,使各个马达产生不同的升力以进行姿态上的修正。控制方法如图3所示。
作品结构
硬件架构
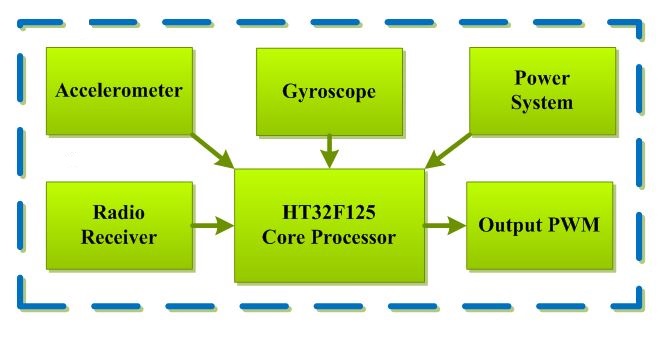
四旋翼飞行器硬件架构如图4所示。飞行控制板主要由微控制器核心、加速度计、陀螺仪、电源电路、遥控接收电路所构成。
本作品所使用的加速度计与陀螺仪皆为模拟式输出,输出讯号为电压变化,因此我们使用微控制器的ADC功能,将传感器的模拟讯号转换为数字讯号,透过程序计算出目前飞行器的姿态,而遥控接收器所输出的讯号为PWM讯号,所以我们利用微控制器的GPTM1来接收并利用程序计算出PWM的Duty Cycle,计算出Duty Cycle后透过程序处理解读出用户的控制指令。
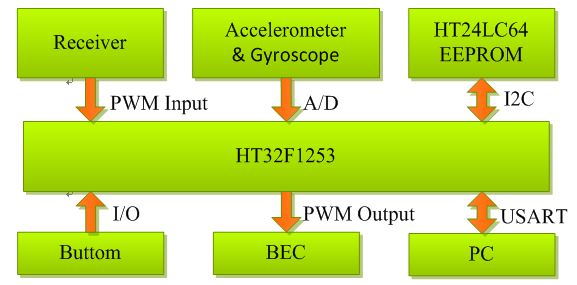
接下来将飞行器的姿态与用户的控制指令进行融合,利用PID控制器计算出各个马达的控制量,最后利用GPTM0将各个马达的控制量转换为PWM讯号,传送至马达控制器,控制各个马达的转速。微控制器与各周边传感器的关系如图5所示。
软件架构
本作品重点在于利用微控制器配合周边微机电制成之惯性组件,制作出可达到低成本高稳定度之飞行控制系统,飞行控制系统之方块图如图6所示,本系统主要核心为盛群半导体所生产的HT32F1253微控制器,周边配有加速度计(MMA7260Q)与陀螺仪(IDG-650、ISZ-650)负责量测飞行器的姿态并交给微控制器进行计算,微控制器会依照所设计的程序,计算出飞行器目前的飞行姿态,再将计算结果转成控制讯号送至马达驱动器,透过驱动器控制马达的转速,使螺旋桨产生不同的升力,以达到飞行姿态的控制。
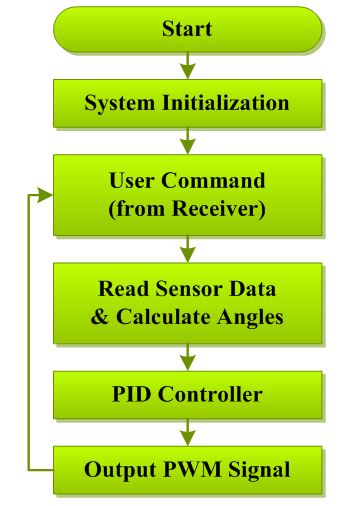
图7为本系统飞行控制系统流程图,当系统启动时会先将所有参数初始化,初始化的参数包含陀螺仪以及加速度计的基准值,初始化后程序会开始进入主循环,接收遥控器的讯号,并解析用户所下达的指令,并读取传感器ADC值进行姿态解算,解算后利用PID控制器,将飞行器姿态与控制指令进行计算,计算完成后系统会将各个马达所需的修正量,利用PWM讯号传送至各个马达驱动器,控制各个马达进行飞行器的姿态调整,经过不断的计算及调整,就能使飞行器保持平稳的飞行。
四旋翼飞行器是否能稳定飞行,且受到外界干扰时直流马达的补偿量是否正确,都取决于控制器的设计。目前本作品的控制系统为PID控制器,其中比例增益为Kp、积分增益为Ki、微分增益为Kd,不同的增益组合会直接影响四旋翼飞行器的反应速度以及稳定性,因此调整出优化的PID参数是极为重要的。
在调整PID参数时发现,当Kp过大时会使整个系统产生最大超越量,使四旋翼飞行器补偿过度,最后导致飞行器翻覆,当Ki过大时会使系统在稳态误差时产生震荡,使四旋翼飞行器无法平稳飞行,而当Kd过大会使系统呈现过阻尼系统,会导致反应速度较慢,无法跟上四旋翼飞行器所需要的快速动态响应。
测试方法
传感器讯号分析
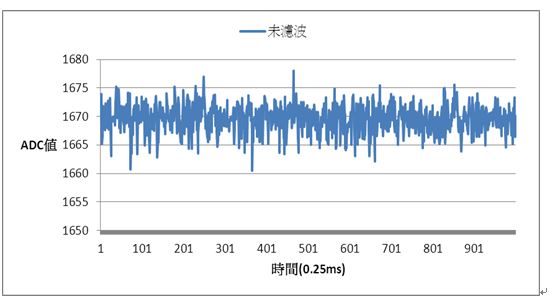
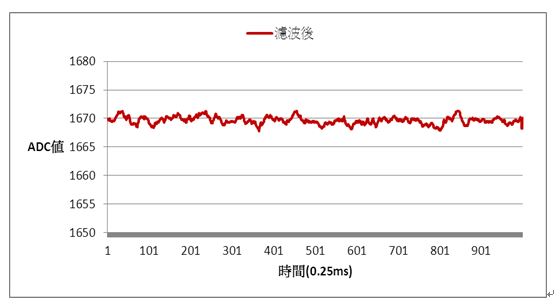
传感器在本系统中扮演着重要的角色,负责量测飞行器的姿态,本系统所使用的加速度与陀螺仪皆是模拟输出,因此讯号经过AD转换后还必须滤波才可使用。图8为硬件滤波后加速度计X轴的讯号,由图可知讯号经过硬件滤波后还是有很大的噪声,因此我们必须利用软件再次进行滤波,加速度计讯号经过软件滤波后明显平稳许多如图9所示。
传感器讯号经过软件滤波后就可将讯号换算为角度,加速度计与陀螺仪计算角度值都须扣除基准值,基准值必须在系统初始化时计算,量测值扣除基准值就可算出变化量,变化量再乘上灵敏度就可算出我们所需要的角度
PID参数调整
PID Controller是目前应用最多的控制器,但其控制参数不易调整,所以大多人会利用Matlab等程序进行仿真,但想要利用程序必须要先建立出模型,对四旋翼飞行器来说建立模型不但麻烦,且必须将大部份变量理想化,如此仿真出来的结果也必须调整,因此本文调整PID参数的方式是实际调整参数,观察并纪录找出最理想的PID参数。
实际飞行姿态测试
四旋翼飞行器飞行时是根据用户遥控器的操作,由接收器输出至飞行控制板,再透过控制核心做运算处理,了解用户所想要的飞行姿态,并且利用正桨与反桨的不同方向惯性,藉此控制四旋翼飞行器之飞行动态。四旋翼飞行器是利用两正桨与两反桨,将惯性抵消才得以保持平稳,也利用了这种惯性使四旋翼飞行器改变飞行姿态。
前进:由用户下达遥控器前进之命令,透过飞行控制板控制使得3号旋翼转速下降、4号旋翼转速上升,藉由这种控制使四旋翼飞行器前倾,达到前进之飞行姿态,再配合惯性组件所量测之讯号补偿1号、2号旋翼的转速,使机体能平稳往前飞行。
后退:由用户下达遥控器退后之命令,透过飞行控制板控制使得4号旋翼转速下降、3号旋翼转速上升,藉由这种控制使四旋翼飞行器后倾,达到退后之飞行姿态,再配合惯性组件所量测之讯号补偿1号、2号旋翼的转速,使机体能平稳往后飞行。
左平移:由用户下达遥控器左平移之命令,透过飞行控制板控制使得1号旋翼转速下降、2号旋翼转速上升,藉由这种控制使四旋翼飞行器左倾,达到左平移之飞行姿态,再配合惯性组件所量测之讯号补偿3号、4号旋翼的转速,使机体能平稳往左飞行。
右平移:由用户下达遥控器右平移之命令,透过飞行控制板控制使得2号旋翼转速下降、1号旋翼转速上升,藉由这种控制使四旋翼飞行器右倾,达到右平移之飞行姿态,再配合惯性组件所量测之讯号补偿3号、4号旋翼的转速,使机体能平稳往右飞行。
左旋转:由用户下达遥控器左旋转之命令,透过飞行控制板控制使得1、2号旋翼转速上升,藉由顺桨旋转之逆向惯性,藉由这种控制使四旋翼飞行器往左转,达到左旋转之飞行姿态,再配合惯性组件所量测之讯号补偿3号、4号旋翼的转速,使机体能平稳往左旋转。
右旋转:由用户下达遥控器右旋转之命令,透过飞行控制板控制使得3、4号旋翼转速上升,藉由逆桨旋转之顺向惯性,藉由这种控制使四旋翼飞行器往右转,达到右旋转之飞行姿态,再配合惯性组件所量测之讯号补偿1号、2号旋翼的转速,使机体能平稳往右旋转。
结论
本研究四旋翼飞行器微控制器核心是使用盛群的HT32F1253 32bit MCU,并搭配MMA7260Q加速度计与IDG-650、ISZ650陀螺仪以达成飞行姿态控制目的。经由设计、分析、制作与实验测试,已完成四旋翼飞行器制作与测试,经实测结果四旋翼飞行器可完成稳定之飞行控制,包含前进、后退、起飞、降落、定点盘旋、侧飞、旋转、曲线飞行、急速飞行等均可达到稳定飞行目的。
(本文由盛群半导体提供;作者为明志科技大学机电工程研究所陈源林教授、洪玮廷、苏信毓、郭耀文、洪伟哲等)