近几年,智慧型车辆的报导相当多,自动驾驶和先进驾驶辅助系统(ADAS)的技术提升与相关课题,相信之后也持续备受关注与讨论。现阶段,相当多的汽车大厂,均不遗余力的投入自动驾驶的软硬体开发,目前包括降低事故的刹车系统、车辆行驶时车道偏离警告、行车视线盲点警告、维持行车路线辅助等,相信在最后,也将会全面导入高安全性的自动驾驶系统(图1)。

| 图1 : 全球汽车大厂均不遗馀力的投入自动驾驶的软硬体开发。(source:CLICCCAR) |
|
在2018巴黎车展上,丰田汽车丰田章夫社长表示,在开发自动驾驶系统的过程中,包括模拟行驶与延伸的相关测试,相信必须进行超过1400万公里以上。而对于自动驾驶开发一直不遗余力的GOOGLE,在过去6年之间就已经累积400多万公里的测试。
全球汽车业者相竞投入先进驾驶辅助系统开发
在过去数年中车用的电子零组件持续激增,以目前来说,在车辆中被作为标准零件的电子产品已经占了整体车辆零件比的40%,未来确信还会持续的增加,例如包括ADAS的安全性系统、TCU的电子控制系统、车用资讯娱乐系统、电子视镜系统等,除了减少耗能之外,最大的目的还是以行车安全为主要目标。
当然伴随着所使用的零组件范围扩大,加入的供应商也随之增加,例如以电子视镜系统为目标的美国Gentex就加入此一市场,而PANASONIC也随后跟上(图2)。此外,以高阶配备为诉求的抬头显示器(Head Up Display, HUD)这个领域,也吸引着众多日本业者相竞投入开发生产。

| 图2 : PANASONIC积极投入符合ADAS所需的车用显示产品(source:PANASONIC) |
|
在追求先进辅助驾驶系统下,例如本田在2017年第三季末发表一款新增加先进辅助驾驶系统8项功能中的停车辅助系统(避免倒车误触)与适路性车灯系统(Auto Hi-Beam),借以提高驾驶者的行车安全。
这款新发表的轻型车系N-BOX,在本田汽车所称的「Honda SENSING」系统功能中,将77GHz的微波雷达整合到前水箱罩内,并且在前水箱罩的内部上方安装了一部单眼相机,可以对前方、对向以及行人进行影像感测,来达到事故避免的目标。
Honda SENSING系统原本就涵盖了8项安全设计,包括:
一、前方车辆以及步行者闯入安全范围时,立即自我启动刹车功能
二、防止误入行车档位
三、步行者事故降低
四、行驶方向偏离
五、前方车辆追撞预防
六、维持行车路线
七、前方车辆起步行驶通知
八、标志辨认等的功能性
其中的第三项步行者事故降低方面,还有为了避免与步行者发生碰撞时,启动方向盘自行转向的能力。
本田汽车在N-BOX所新增加的停车辅助系统(避免倒车误触)与适路性车灯系统(Auto Hi-Beam),更是让「Honda SENSING」系统的安全性,再往上提升一个层次。避免倒车误触功能方面,是为了在倒车行进时,对油门进行误踩的预防,而并非是与后方障碍物有关。在排档杆被排入R(倒车)档时,当因为误踩油门踏板而出现快速提升倒车速度时,这时引擎的动力输出就会受到控制,进而避免人为因素所发生的无谓事故。而Auto Hi-Beam部分则是利用在前水箱罩内的单眼相机,来对前方车辆的尾灯及对向车辆的头灯进行感测,并且可以自动调整该车头灯的投射角度,避免头灯的投射对前方车辆与对向车辆带来刺眼或炫目的影响(图3)。

| 图3 : 本田在新发表的车款中增加了摄影机、感测器与雷达,来强化「Honda SENSING」系统(source:本田汽车) |
|
动态地图扮演先进驾驶辅助系统无形助力
在日本,除了各大汽车厂卯足全力开发ADAS相关的硬体系统与零组件外,在软体与智慧化系统也有相关业者相近投入开发,这其中又以动态地图系统最受关注,动态地图在先进驾驶辅助系统中扮演相当重要的基础能力,同时也被认为是自动驾驶中Level 3以上的等级,各个业者无不以在2020年实用化为目标而加速努力开发各项技术,尤其是最大的基础技术—动态地图。
目前驾驶者行驶车辆的过程中,大多是依赖地图或者是导航设备来决定行进方位,除此之外,几乎都是靠自己的视觉与听觉来掌握与判断行车过程中的各种情况,例如,红绿灯的颜色信号、道路施工看板,以及步行者或其他的周遭车辆的移动等,时时刻刻都必须专注在各种动态变化,来确保行车的安全性,而相同的,在未来即将被开发的全自动驾驶辅助系统中,也必须将这些讯息加以感测与分析,这时,除了透过车上的各种感测器或雷达来获取各项必须的情报外,更需要将这些情报配合交通法规、道路施工讯息、交通事故通报等变化加以整合,才能够大幅度提升全自动驾驶车辆的行车认知度。
而这样的认知能力基础,需要让立体(3D)地图的能力与资料具备高精度完整性,而这些完整性的资料必须仰赖汽车业者、车用电机业者、地图资料业者、量测业者来共同合作,完成此一动态的基础地图资料库。
构成动态地图的4个阶层
以目前来说,几乎所有的导航地图资料库中,都仅仅只是记载了区域内的道路路线而已,更先进一点的,还能从云端系统中获得当时的交通流量与固定被规范的各种管制,但是,这和实际的道路上各种变化还是有相当程度的不同,包括新道路的开通、道路施工等,各式各样的状况都持续性的出现与发生,这种时时刻刻都出现变化的道路资讯,就必须依赖具有即时更新能力的动态地图来弥补。
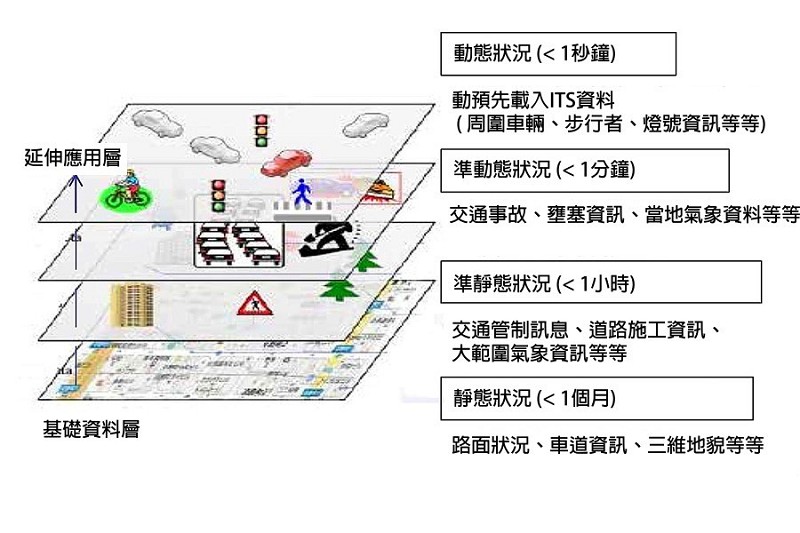
因此动态地图中,涵盖了4个不同情况的阶层,包括周遭车辆、信号等瞬息万变的「动态状况」、变化较小的交通事故、壅塞、气象等情报的「准动态状况」、交通管制、道路施工等预先可以获知的「准静态状况」,以及长时间被管制或变更的「静态状况」(图4)。
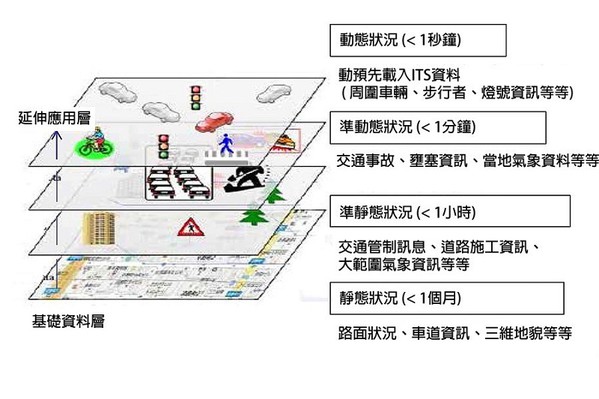
| 图4 : 利用4个不同状况阶层构成动态地图(source:DYNAMIC MAP PLATFORM) |
|
就技术能力来看,「静态状况」资讯,大多数的汽车业者都有能力将这些资料,以下载更新的方式,储存在利用GPS的导航或图资的资料库之中。但这也仅仅只是可以预先提供给驾驶者一个行驶方向或变更路线的建议和引导,当然这些情报与行车方位的精准度,会和汽车业者投入资料库的研发与生产成本有着正比的关系。
更先进一点的新款车种,还会再加上各种的感测器来配合高精度经纬度方位,正确地计算出实际的行车位置,而以极小误差与不断修正来进行行车导引的功能。但是,就如前述,例如各个道路的天候状况、车流量等,却是无时无刻都在变化,也都不尽相同。这时即使是装配最先进的感测器,也无法能够完全的进行辨识分析,或者因为需要不断的运算,而加重系统的负担,造成情报输出延迟。
如果在导航或驾驶辅助的资料库中,能够预先获得道路标志、停止线等的地貌资料,就能够大幅度减轻行车系统的运算负担,以及获得感测器无法感应到较远的相关资讯。可是并非所有的汽车业者都能够认同这些论述,也是有部分的汽车业者认为,只要配备了感测器与摄影系统的话,根本不需要这些预告资讯。
透过三维群点资料和高精度方位资讯完成向量地图
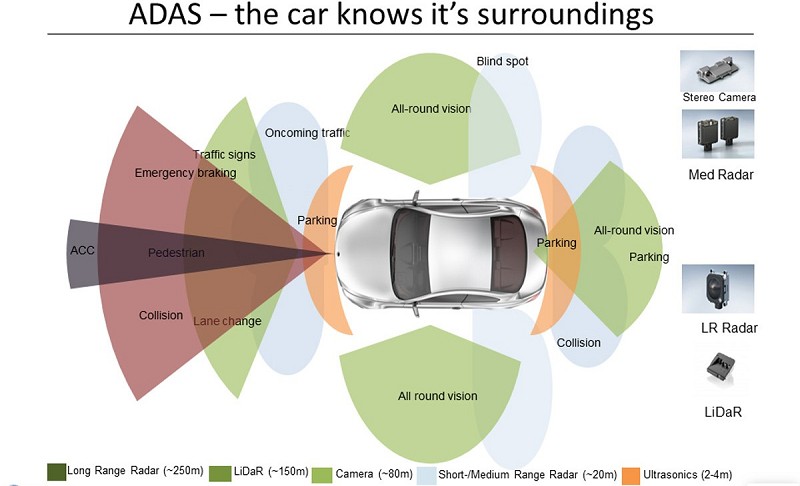
不过,大多的行车辅助系统或资料软体业者都相信,仅仅依靠感测器或摄影单元,仍旧存在相当大的风险。以感测器为例,大多价格成本可以被接受的LiDaR感测器,能够侦测到的前方距离大约是150公尺左右,超过150公尺的物件或车辆,就无法被有效感应(图5),或者是在连续弯曲的道路上,也没有办法正确的感测到已经过弯的前方车辆,或尚未过弯的对向车辆,而有很大的机会,让行车辅助系统误判成车辆是处于安全行驶的状态下。因此,不能说具有先进驾驶辅助系统的车辆,仅依赖高阶感测器,就能够在自动驾驶的情况下完全没有安全性的疑虑,而必须认真的面对和考量不足点,再进一步的导入更多情报来补足以及提高自动驾驶的安全性。
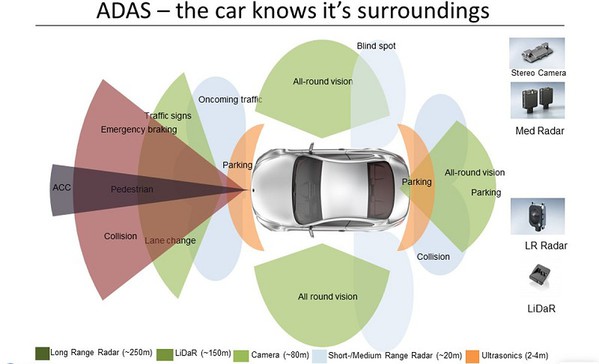
| 图5 : LiDaR感测器能够侦测到的前方距离大约是150公尺左右(source:STR Service Centre) |
|
逐渐被重视的动态地图可以预想到将会在先进驾驶辅助系统中担任3大功能。
首先是资料预读,透过资料预读的功能,可以了解到前方道路的实际状况,进而降低或增加车速,以及让方向盘预做转向的准备。其次,可以准确的计算出目前的行车方位和速度,在比对图资中道路的位置后,更正确地进行车辆的行驶。最后,在驾驶控制的方面,当车辆沿着道路中线前进时,在获得更远的前方实际状况后,能够预先启动或检测刹车系统,大幅度的降低行车危险性。甚至可以这么形容,动态地图是先进驾驶辅助系统中另一个层次或状态的感测器。
动态地图系统除了扮演着先进驾驶辅助系统进行安全行驶的沟通外,和目前较为先进的导航产品一样,另一方面也可以透过萤幕或投影设备,将地图或行车资讯以三维向量作为运算的资料基础,再透过影像的呈现方式传送给驾驶者,让驾驶者除了可以了解目前行车的中心位置,以及周围的地物与障碍物状态。
透过其他资搜单元来整合、分析与描绘资料之所以能够将这些所呈现的影像资料,包括路肩边缘、交通标示、行车中心线等,并且将复杂的道路状况予以资料库化的能力,除了需要预先制作高精度的图资之外,还需要搭配GNSS(卫星测位系统)、六轴加速器、陀螺仪、光学摄影机、雷射扫描器(LiDAR)等等单元所组成的移动测绘系统(Mobile Mapping System, MMS)(图6)。

| 图6 : 利用移动测绘专用车来完成地貌资料搜集(source:AISAN TECHNOLOGY) |
|
透过移动测绘系统可以即时记录当时道路的状况或资讯,反向上传到资料库伺服器中,再经由广播或下载的方式,传递到其他的动态地图资料库之中。
这些群点所在地的资料,是经由卫星测位系统来进行标定位置,这个定位资讯比起一般手机中所内建的GPS,在精度方面还要更加准确,卫星测位系统是以面积区域参数校正(Flachen Korrektur Parameter, FKP)方式来获得定位资讯,可达到公分等级的高精度定位。
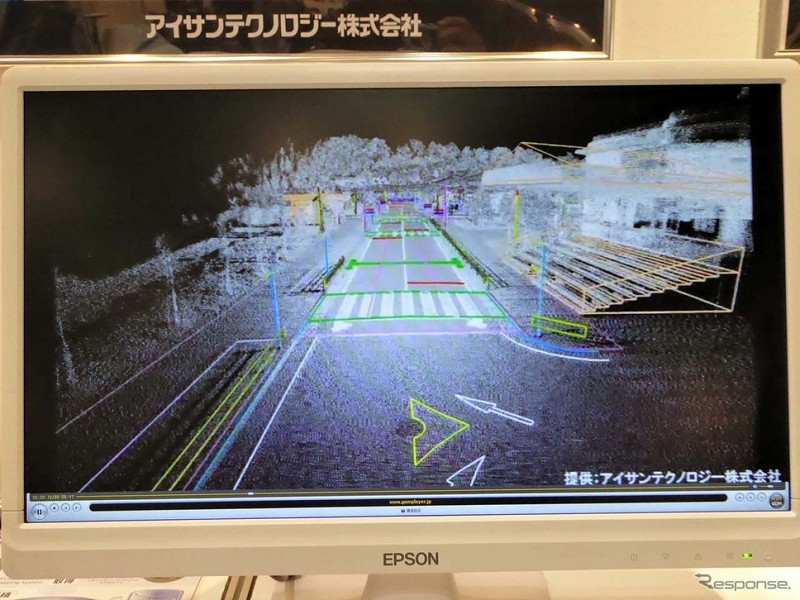
而雷射扫描器(LiDAR)在群点资料中,扮演着从卫星测位系统获得高精度方位资料后,进行合成解析的工作,所有的点都会进行X、Y、Z座标的标定。处理后的资料再进一步的结合摄影机所拍摄到的影像,比对出有用的物件,再予以进行向量绘图形成动态地图中的一部分,这些完成处理后的资料,能够快速方便让其他车辆行经该路段时,可以准确且清楚的分辨和投射出车道线、停止线等实际的当地物件给驾驶者参考(图7)。
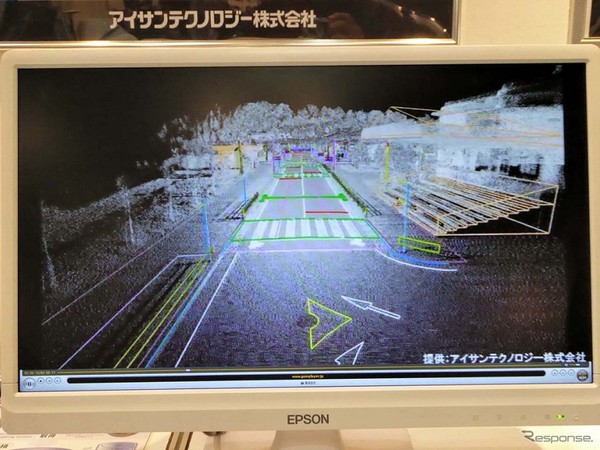
| 图7 : 处理後的资料再进一步的结合摄影机所拍摄到的影像,比对出有用的物件,再予以进行向量绘图。(source:AISAN TECHNOLOGY) |
|
日本与美国皆同步进行动态地图中的资料搜绘
目前这方面的系统资料,在日本当地已经开始准备,透过搭配移动测绘系统的车辆,目前已经针对高速公路以及汽车专用道路,进行3维地图资料的搜集,预计在2018年度,完成3万公里的地图资料。
在完成高速公路以及汽车专用道路的地图资料绘制后,接下来就会开始进行一般道路的资料测绘工作。不过,由于一般道路的问题相当多且复杂,目前尚未决定如何进行。
除了积极的进行地貌与道路的绘制,另一方面,爱知县额田郡幸田町也在2017年年底尝试导入这一套动态地图系统,结合原有的自动驾驶系统在每条道路的交会点以及新社区中进行实验。透过这套动态地图系统,不仅仅为自动驾驶预做准备,同时也将功能性延伸到防灾以及道路建设的管理,进而达到让交通管控无人化的程度。这样的实验与研发不只是在日本,在美国的加利福尼亚州也同样的在进行动态地图资料的预做工作,一样是利用移动测绘系统,来进行地貌地物的描绘,预计第一阶段将完成数十万公里道路的资料处理。