

未来的车辆除了肩负着实现二氧化碳中和移动的目标之外,还须具备自主、电动、互连等特性而且车辆将透过软体定义。本文探讨3D模拟对於自动驾驶的重要性。
由软体定义、自主、相连、且电动的未来车辆承诺协助实现共享的碳中和移动性。企业组织正投入数位能力来推动从设计最隹的机械至提供艺术境界的端到端移动性与数位服务的转换。如此的愿景代表着使用者经验将相当大程度地透过软体来定义。
为了实现这项愿景,汽车产业正在自我重塑,将软体视作未来价值的推手。由软体来驾驶我们的车辆,同时在我们结束一通工作上的电话时,为我们在喜欢的餐厅订好座位,这些动作全在车内完成。这样的软体有一个被称为「自动驾驶软体(autonomous driving software;ADS)」的重要元件,它被期待能够无瑕疵的运作,让搭乘者(已经没有所谓的驾驶者)能够有时间从事其他活动。
问题1:当前的自动驾驶团队面临哪些最大的挑战?
答:自动驾驶车辆(autonomous vehicle;AV)领域在Level 4(L4)或Level 5(L5)自主驾驶化为可能之前有几项需要被解决的挑战和障碍。如同最近的IAA所示,有一部分公司已领先其他公司,更接近这些挑战的解决方法,而且不是只有在美国,也快要开始在欧洲进行试验。
这个领域的工程师会面临下列几项的挑战:
*证明他们设计的ADS无害、安全且可靠:路上自动驾驶车辆(AV)不会造成意外是接受自动驾驶车辆公开运行的首要条件。ADS应要可靠且无害地在其操作适用范围(operational design domains;ODDs)运作,才有让AV行驶於路上的可能。如何打造无害、安全且可靠的ADS是当今的AV团队所面临的最重要的挑战。
*以虚拟的方式测试车辆来涵盖各种ODDs的大量情境:在真实世界进行ADS性能的检验,被普遍认为是不实际的作法。因此,工程师必须转以虚拟的方式来测试ADS,在此,他们可以拓展测试范围,同时进行几千个模拟来证明ADS在特定ODD的所有可能情境下,皆做出正确的决定。
问题2:3D驾驶模拟解决了哪些问题?
答:根据我们与全球主要汽车企业组织的合作时的观察,许多汽车企业组织已经建立起解决他们的重大挑战所需的能力与成熟度。这些挑战却在最近这段期间随着科技的进步而加重,因为科技的进步带来了新的架构与新的功能,这些通常需要仰赖与其他功能的整合。企业组织正将嵌入式软体大规模的虚拟测试视为关键。3D驾驶模拟(3D Driving Simulation)软体可协助设计场景与情境,让ADAS可以在其中进行测试。这主要可以协助:
*藉由启用早期的ADS封闭??圈测试来缩短开发周期,包含ADS中的感知、规划与控制软体。
*透过虚拟测试来降低开发成本,并且提供一个无害的方式来测试所有可能的极端和危险情境。
*以虚拟的方式使用与真实世界关联的场景来检验ADS,进而达到ISO 26262和SOTIF的要求。
问题3:设置驾驶模拟需要哪些步骤呢?
答:大致上会有以下几项任务需要留意:
*准备一个虚拟的车辆模型。这通常会使用像是Simulink等工具。
*选择一个正确的感测器模型并架设在虚拟车辆模型上。重要的是所选择的感测器模型必须具备适当的逼真等级,让它们对於3D世界的感知能够比拟物理原型对真实世界的感知。
*使用RoadRunner等3D场景设计工具建立逼真的场景,并且确保这些场景符合自动驾驶车辆的目标ODD。
*依据测试策略设计驾驶情境。为了确保ADS的品质,用来模拟的情境必须高度与真实世界的情况相关。基於这点,有一些公司已经采取再刺激(restimulation)架构,这时虚拟情境是使用真实的测试驾驶产生资料,接着以该情境所有可能的变异来进行ADS和虚拟车辆的测试。
*将场景、情境与虚拟车辆模型汇入至一个驾驶模拟软体,并进行ADS的模拟。
重要的是,要知道建立场景、选择合适的感测器模型与设计涵盖所有可能情况的情境是相当耗时的作业,通常需要几周或几个月的时间来执行。当虚拟的检验不断地需要高品质的场景和人造物,许多现有的解决方案仍缺乏提供有效率的场景建立能力。
问题4:看起来正确地建立3D场景在ADS的测试扮演重要的角色,那麽现今的3D场景是如何建立的?
答:建立精确的3D场景是3D驾驶模拟当中的一个关键步骤。真实世界的点云扫描、正摄影像(Ortho imagery)和其他的向量资料可作为叁考依据,在设计3D场景时给予协助。
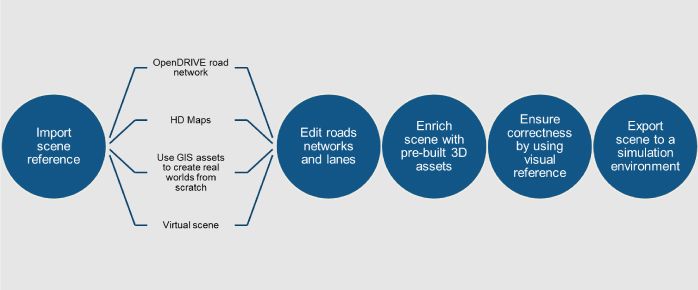
使用如RoadRunner等工具来建立场景的大致会有以下几个步骤:
*从OpenDRIVE road network等几种来源汇入叁考场景,或者使用GIS资产从头开始或透过现有虚拟场景来建立出真实世界场景。
*在汇入的场景中编辑相关区域的道路网路和车道,通常会以几十或几百公里的范围执行。
*透过预先建立的3D资产,如建筑物、植物、道路上的物体等等,让场景更加丰富。
*使用如卫星成像(Satellite imagery)等虚拟叁考,来确保场景的正确性。
*最後是将在RoadRunner建立的场景汇出为产业标准的格式,包含OpenDRIVE、FBX、gITF、OpenFlight、OpenSceneGraph、OBJ和USD。
|
问题5:使用RoadRunner等工具来设计场景有哪些重要的优点?
答:使用道路网路设计和场景建立的专门工具有许多优点,其中最主要的特点有:
*在RoadRunner建立的场景可以很轻易地汇出成常用格式,接着可以与大部分现成的驾驶模拟器整并。这可以使团队保持高度的弹性。将场景设计作为商业用途的企业组织可以透过单一工具,将多个客户设定为目标。RoadRunner Scene Builder可协助从HD地图自动产生3D道路模型。RoadRunner的场景可汇出至各种模拟器和游戏引擎,包括CARLA、Vires VTD、NVIDIA DRIVE Sim、Cognata、Metamoto LGSVL、Baidu Apollo、Unity、和Unreal Engine。
*RoadRunner Asset Library可以快速地使用逼真且视觉性一致的3D模型来填充3D场景。
问题6:驾驶模拟器通常会需要哪一种类型的资料?
答:通常来说,一个场景设计工具会汇出两大类的资料:
第一类是几何网格(geometric mesh):例如道路、路缘、地形、和场景内的物件。这类资料由摄影机、光达、雷达等感测器模型做使用。
第二类是语意资料(semantics information):通常会被汇出为OpenDRIVE格式。语意资料常使用於规划演算法的设计和检验。
依笔者经验,单单一家企业组织内的不同团队,也时常使用不同的驾驶模拟器。在这样的情况,如果有方法可以只建立一个场景,并使用该场景作为所有模拟器的单一真实来源会有很大的帮助。
问题7:高度细致的地图对於此领域有多高的重要性?
答:当车辆逐渐跨越SAE自动驾驶等级的阶梯,现今主要的自动驾驶团队考量了HD地图,作为完整自动驾驶架构的一部分。HD地图(High-Definition Maps,高解析度地图)提供了高度准确的道路和车道地图,包含环境的高逼真度,例如精确的斑马线位置、红绿灯、道路弯曲度(curvature of the road)、转弯半径(turn radius)、障碍等。这些地图的精确程度通常可以达到以公分为单位或甚至更小。自动驾驶车辆需要HD地图来处理感知演算法的不一致性,就像是人类在跟随GPS的时候一样。
广泛来说,HD地图可以提供下列协助:
1.定位(localization):作为透过感知和感测器融合演算法建立的环境模型的叁考
2.规划(planning):HD地图中的详细资讯可帮助驾驶策略功能依据现有情境来规划路径
3.软体测试(software testing):在开发软体时,HD地图可协助建立代表真实世界的虚拟场景,该场景也能被用来测试ADS。
过去十年来,有一些新的机构组织为工程团队和车队业者(OEMs)开启了HD地图的新商业模式。但是由於HD地图的建立和维护所涉及的成本,至今仍未普及,因为不像车辆中常见的GPS地图只需要几个月更新一次,HD地图每过几周就必须进行更新。
问题8:是否有客户使用案例(叁考)可以分享?
答:在今年的MathWorks汽车年会(MathWorks Automotive Conference),Porsche Engineering Services谈论到Porsche Engineering ADAS Testing Centre(PEVATeC)的工程师如何整合最隹的工具、资料来源、以及车辆与ADAS的经验,建立并提供一个灵活的模型化模拟平台,以支援端到端的ADAS/AD开发。
问题9:3D模拟可如何运用在自动驾驶演算法训练?
答:使用录制资料的限制,在於这类资料只能被使用在真正以录制方式建立的情境。演算法开发人员除了录制资料之外,还会需要合成资料来测试难度高、具危险性或鲜少发生的案例。透过摄影机、光达、雷达或其他感测器,如IMU和GPS所适用的模型,工程师可以透过3D模拟来整合3D场景与他们的开发环境,如MATLAB与Simulink,来获得合成资料。开发人员也可以重新产生录制资料,来启动录制案例变异的测试。
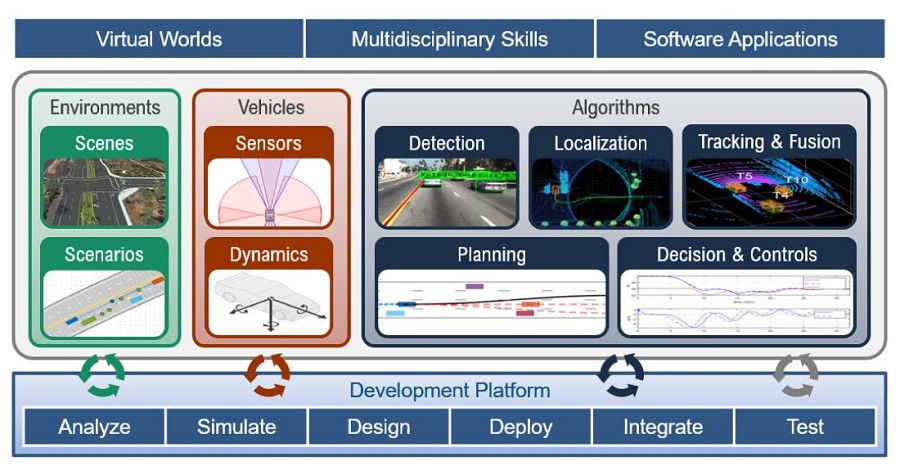
问题10:MathWorks在此领域即将提供哪些新的支援呢?
答:几波趋势正推推动着MathWorks的投资。首先是对於虚拟世界的需求。为了要减少针对难以在真实世界建造或可能有害的情境进行车辆测试与探索,产业对於模拟的采用持续增加。MathWorks提供工具协助进行场景、情境、感测器和动态的设计与模拟。
|
第二波推动MathWorks投资的趋势是对於结合多门学科的技能需求。开发包含自动驾驶应用需要规划、控制和感知等规则的多项技能,像是侦测、定位、追踪、与融合。MathWorks提供专门的工具箱来帮助学习及运用这些规则。在整个开发过程中可以使用这些工具箱的指标和分析功能。
第三波推动投资的趋势是对於软体的需求。MathWorks在这方面的投资主要在於加强平台的工具,帮助使用者进行嵌入式软体的设计、部署与测试。
(本文由??思科技提供;作者Gaurav Tomar任职於MathWorks公司)
PIC32-BZ6:新一代高度整合单晶片无线平台
随着智慧设备的射频(RF)设计复杂性日益增加,传统无线解决方案通常需要多晶片组合才能新增功能,或频繁重新设计才能满足不断升级的行业标准。为此,Microchip推出全新高度整...
随着智慧设备的射频(RF)设计复杂性日益增加,传统无线解决方案...