摘要
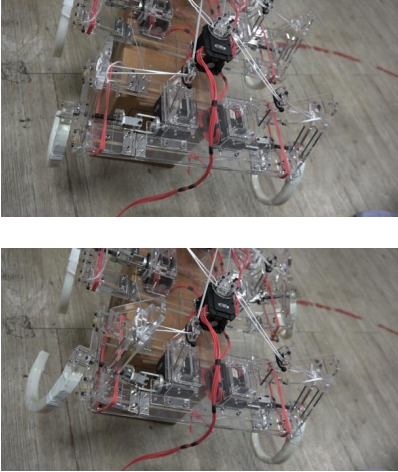
本文所製作的「仿昆蟲多步伐快速行走六足機器人」(以下簡稱「仿昆蟲型六足機器人」),其機構是以仿生為出發設計概念,由八顆馬達組裝而成,基本步態的六顆馬達及另外兩顆馬達進行抬放腳之控制來完成,並且以特殊靈活的“C”形足部結構功能來進行崎嶇路面與障礙物的突破,“C”形足部的上端透過十字萬象軸與馬達相連,下端則與地面接觸,使各個足部可分別獨立 360 度轉動及彎曲抬放腳,以週期性規則交互迴旋的方式使機器人前行,“C”形足部採用熱塑土製作,仿昆蟲型六足機器人其機構由,並使用特殊“C”形構造完成足部的行動機構以及利用特殊可彎曲之懸吊腳結構以及十字萬象軸傳動腳之所需之動力。裝上彈簧避震器讓機器人在探索受到外力撞擊時力量不會直接傳輸到馬達上,其力量會被避震器吸收,大大降低機器人在運作中損壞的機率。
1.緒論
1.1研究背景
在這個對生命珍視的年代,科技的快速發展,使得每個人的生命都須承受一個家庭,甚至是社會的責任與期待。但是人類仍須到未知環境、危險地域、或是軍事現場執行任務,甚至在現今歹徒火力強大的情況下,警察還是必須冒著危險攻堅。因此研發具備偵察能力之機器人取代人類,完成高危險性的工作,已成為一個有效的解決方案。偵察型機器人不僅能防止人類在面臨這些困境時遇到生命的威脅,也帶領了科技產品的進步,使越來越高效率的機器人因而產生。本機器人即是以此觀點,來研發六足機器人。因使用特殊“C”形結構及 AI 馬達,所以能克服路面顛頗及爬坡問題,並且加裝多種感測器,可以輕易完成任務,如果探索過程中遇到比六足機器人低的洞穴,此時可轉換低姿態模式降低身體高度匍匐前進,輕鬆爬過洞穴。此外機器人本身採用鋰電池及電池保護電路組,提供機器人整體的動力來源,工作時間長達數小時。
2.系統架構
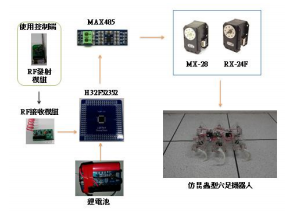
2.1硬體系統架構
2.2 RF射頻收發模組
射頻 (Radio Frequency,簡稱 RF) 指的是任何在3 kHz至300 GHz 的電磁波。
(1)YK04:RF 接收模組,由 RF 接收電路,以及解碼晶片PT2272-M4組成。
(2)JY02:RF發送模組,由RF發射電路,以及解碼晶片PT2622組成。
2.3 MX-28/RX-24F AI馬達
2.3.1 Dynamixel RX-24F AI 馬達
Dynamixel RX-24F 每個 servo 都能夠跟?其速度,溫度,軸位置,電壓和負載,也可以為每個 servo 單獨調整用於保持軸位置的控制。RX-24F 具有較低的扭矩和電壓要求,於是用來控制六隻腳。規格如下
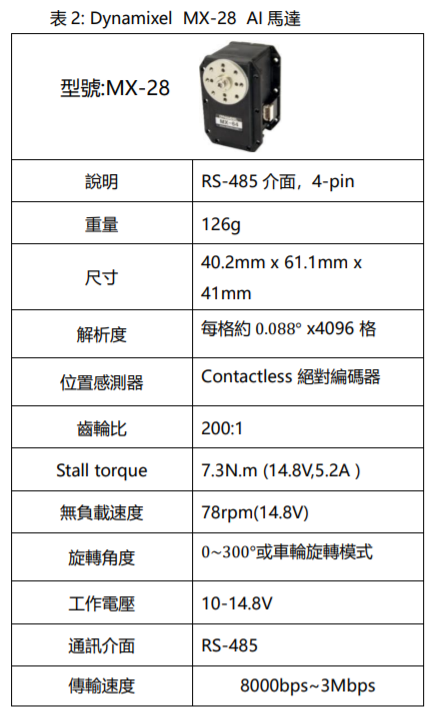
2.3.2 Dynamixel MX-28 AI馬達
Dynamixel 系列的 MX-28 較高扭力以及較高精準控制馬達,仿昆蟲型六足機器人抬腳之動作,醫科馬達需負擔三隻腳,所以使用較大扭力之馬達。規格如下表2。
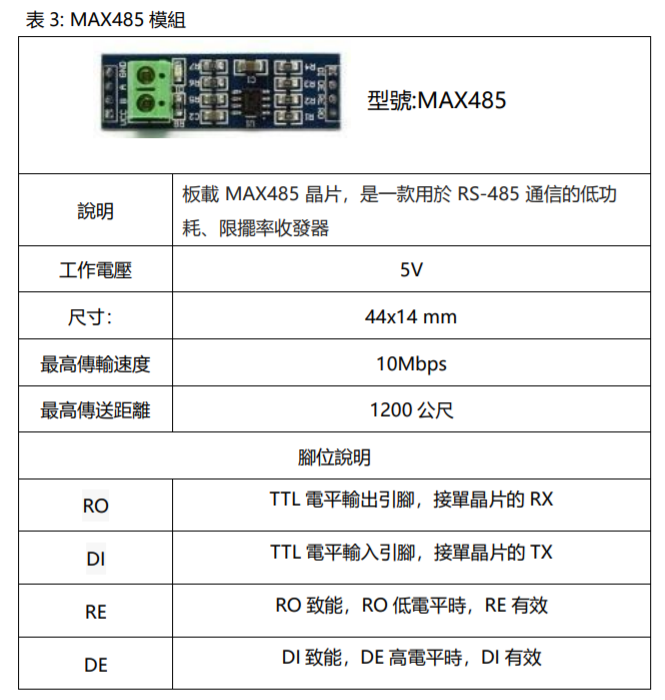
2.4 MAX485模組
Dynamixel 系列馬達為 RS485 通訊協定,所以需要UART轉RS485的介面。規格如下表 3。
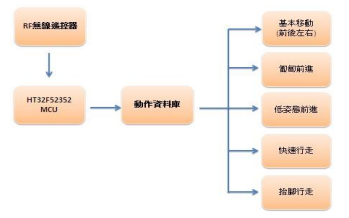
2.5 仿昆蟲型六足機器人軟體系統架構
仿昆蟲型六足機器人以Keil uVision5撰寫程式,使用者在利用RF無線遙控器控制仿昆蟲型六足機器人行走步態,指令由YK07RF接收模組傳輸到HT52352 MCU下達指令給機器人。系統功能如圖2所示。
2.5.1 HT52352 MCU工作內容
(1)傳送Dynamixel系列馬達封包
Dynamixel 系列的 AI 馬達,需要以封包形式傳送指令,通訊協定是 RS485。封包格式入如下圖3。
(a)0XFF、0XFF:此封包開頭。
(b)ID:用來控制馬達 (c)LENGTH:資料長度,計算為“參數(N)+ 2“。 (d)INSTRUCTION:給馬達的指令類型。
(e)PARAMETER: 參數(轉速、轉角),可以有N個。 (f) CHECK SUM:檢查碼。
公式為Check Sum = ~ ( ID + Length + Instruction + Parameter1 + … Parameter N )。
(2)接收RF遙控器指令
RF 發射模組「JY02」發送訊號,RF 接收模組「YK04」接收,並由「YK04」模組內的 PT2262 晶片解碼後,變成四個 1bit 訊號,分別由 MCU HT32F52352 的 GPIO 腳 PB1~PB4 讀取。
(3)馬達動作流程
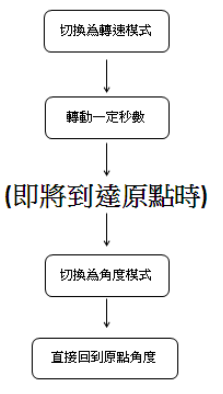
Dynamixel 系列的 AI 馬達,有兩種模式,轉速與角度模式。由於轉速模式每個馬達之間會有小落差,為了達到整齊劃一,每轉一圈需要切換兩種模式來達到準確地目的。流程如圖 4。
本機器人的動作模式,皆由此流程為基礎,加上許多構想,從而打造各種移動模式,並集成動作資料庫。
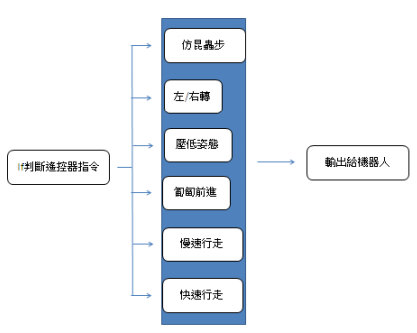
(4)MCU HT32F52352 動作判斷
接收到RF遙控器的指令,MCU 讀取 GPIO PB1~PB4 腳位狀態後,由 if 判斷式來判斷是什麼指令,再讓 MCU HT32F52352 發送動作庫中的指令給機器人。流程如圖 5。
3.研究內容
3.1馬達與C型足部
本機器人之所以擁有高穩定度及跨越性,其因使用特殊的足部構造與控制方式;足部結構使用半圓型C形設計,如圖6所示,C形設計材質使用熱塑土與壓克力進行連結,在安裝置AI馬達,熱朔土可加熱至80度進行軟化,即可塑形,冷卻後可保有一定的韌性,此特性如同一個隱型避震器。
當足部未受到外在加壓力時足部頂端與末端之間相距10公分,當受擠壓時頂端與末端之間會開始收縮,最大收縮度可以達到1公分,如圖6 所示。相當於完全壓迫,但是並不會因此永久變形,突破障礙物後即可恢復原狀,有助於機器人行徑在崎嶇道路上或是受到強烈撞擊,C形足可吸收撞擊力達到緩衝的效果。
3.2十字萬向軸
又稱萬向節,是連接兩根槓杆的接頭,接頭由一對相對方位為90°的普通鉸鏈組成,使槓杆能轉向往任何方向,現在仍廣泛應用於車輛的傳動裝置中,本機器人也是使用了此結構,讓其的足部靈活多變(如圖7)。
3.3六足機器人抬腳方式
@內文:
當初設計機器人抬腳動作時,為精簡結構,於是讓兩個馬達各負責三隻腳,選用扭力較大的 MX-28馬達,配上小滑輪與繫繩,拉抬機器人之足部。詳細動作如(圖9)。
3.2六足機器人運動方程式
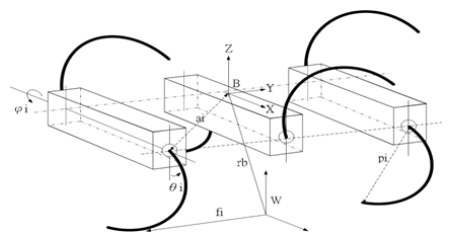
單一足部的運動方程式(1)所示。我們使用此運動方程式推導機器昆蟲的運動方程式。
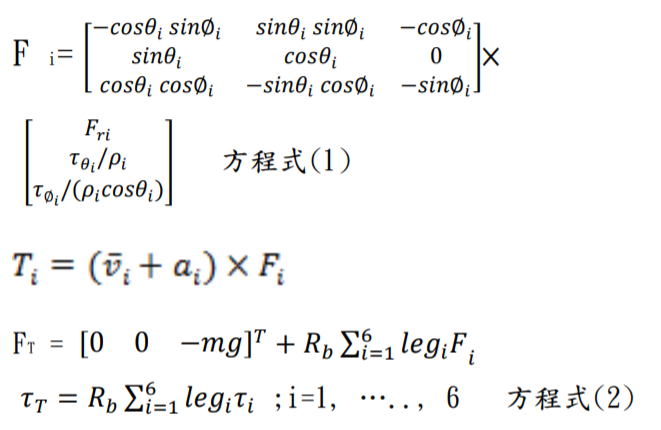
以單足對整體系統貢獻的動力和力矩,如方程式(2)所示。
3.3移動原理
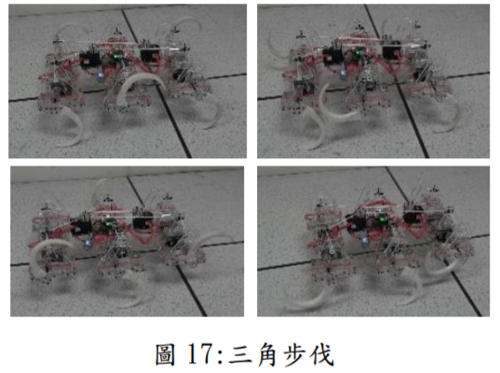
3.3.1 三角步伐
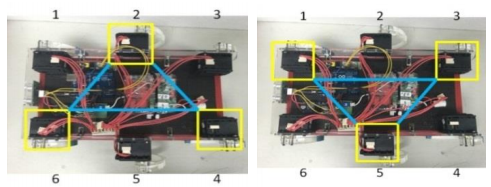
本機器人模仿昆蟲界移動時的三角步伐做為本文的行走模式。昆蟲經過數千萬年的演化,能夠在險惡的環境中自由行走與生存,擁有獨特的行走方式與移動策略,而三角步伐是大部分昆蟲所使用的行走步伐,此步伐動作原理是以三足為一組,其中一側的前、後足與另一側的中足為一組,形成一個三角形支架結構,如圖11所示,當這三足接觸地面向後方蹬時,另外三足便微微往後,使身體稍微往前傾斜,以這種連續交互的方式使得機身向前運動,此步伐是由觀察昆蟲移動時而得出的結果。
3.3.2 三角中心法
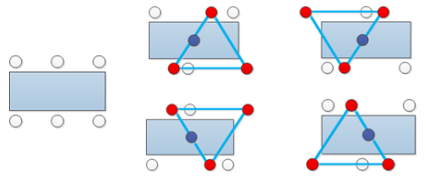
本機器人利用三角步伐作為行走步伐,如何使機器人的行走更加平穩,關鍵在於以不同步伐狀態下,整體中心的方向為何,中心點分別為四種狀態,如圖12所示圖中長方形為六足機器人的身體,藍點為機器人的中心,圍繞在長方形四周的白點或紅點代表六個足部,白點代表腳抬起的點,紅點代表腳落地的點。決定六足型機器人是否能穩定的移動關鍵在於,落地的三隻腳成構成的幾何圖形是否涵蓋中心點,如中心點落在幾何圖形內,機器人則可以保持平衡前進,反之中心點超出幾何圖形,則六足機器人可能會失去平衡因此而翻覆。
3.4移動步
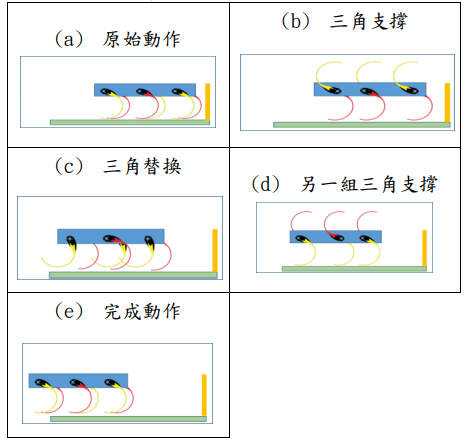
3.4.1 前進與後退行動模式設計
機器人前進時採用三角步伐,以三足為一組 (即以同一側的前、後足與另一側的中足為一組),形成一個三角形支撐結構如圖(b)。當這三足接觸地面向後方蹬時如圖(c),另外三足往前抬起,以連續交互的方式,使機器人向前運動,如圖13所示。圖(a)中橘色方塊代表機器人初始位置,隨著機器人步伐移動,逐漸遠離初始點,圖(e)為機器人所移動的實際距離。前進與後退步伐運動原理相似,差別於旋轉方向不同,故省略。
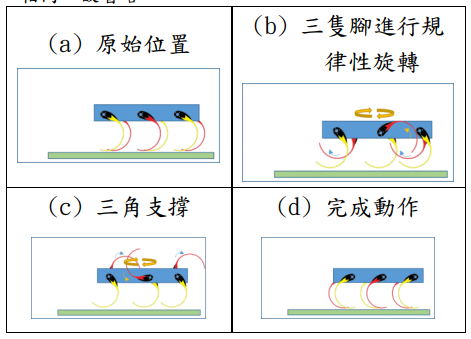
3.4.2 旋轉行動模式設計
本機器人除了可以前進與後退外,還需要左轉與右轉功能。左轉與右轉的原理相同,差別在施力點與方向不同。旋轉步伐依然使用三角步伐為原則,其中一側前、後足以及另一側的中足為一組,形成一個三角形支架結構,固定不動保持機體的平衡,而另外三隻腳進行規則性的旋轉使得機身轉動。若要使六足機器人左轉,六足機器的右側需要產生向前方向的力,左側需要產生向後方向的力,如圖 14 所示,當左側與右側同實施力時機身則會向左偏轉達到左移的效果。因左轉步伐與右轉步法原理相同,故省略。
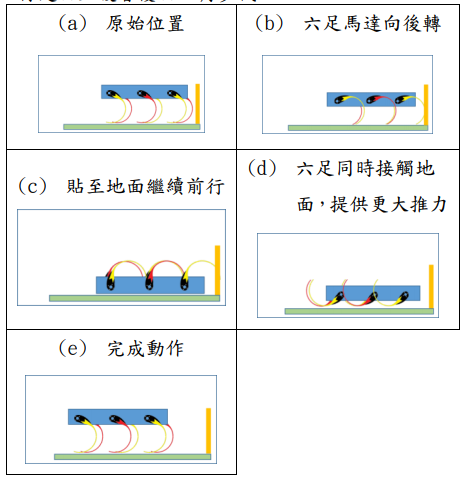
3.4.3 匍匐前進行動模式設計
此行動策略,是以六足為一組,同時向後旋轉使機器人產生向前推力,如圖15、16所示,雖此步伐移動速度不比三角步伐,但是可以獲得較大的推進力,其因三角步伐移動時,是以三點作為支撐向前移動,而且匍匐移前進是同時以六點接觸向前推進,可同時提供更大的推力。
當六足機器人行走在斜坡場地時,會因斜度高低不同,使足部會受到不同的力,以匍匐方式在斜坡上行走於上坡會優於三角步伐。
4.實際成果與測試
4.1三角步伐
仿昆蟲型六足機器人的前進步態也是採用用三角步伐移動原理,移動過程中六足機器人皆可保持身
體平衡,也能穩固前行。如圖17。
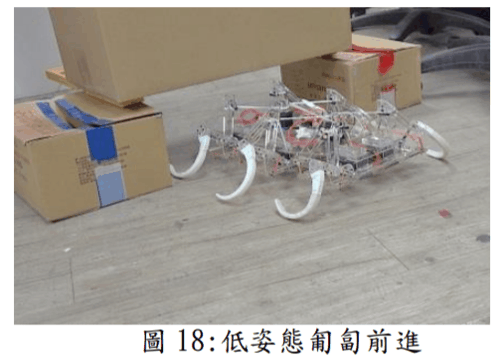
4.2低姿態匍匐前進
當探索過程中遇到比六足機器人低的洞穴,腳卡到洞穴時不會硬往前轉造成馬達損壞,此時可轉換低姿態模式降低身體高度匍匐前進,輕鬆爬過洞穴,如圖18。
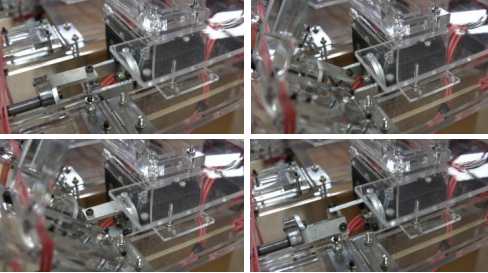
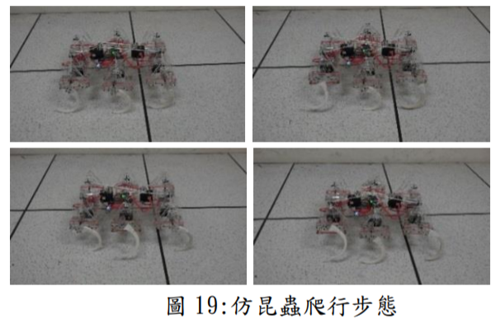
4.3仿昆蟲步態
以仿生昆蟲為設計概念模仿昆蟲真實抬腳步態,讓機器人步態設計上更擬真更多元。如圖19。
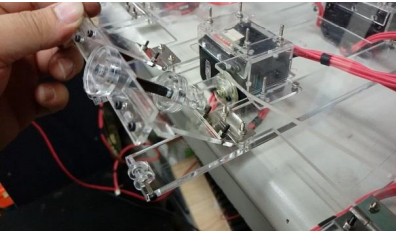
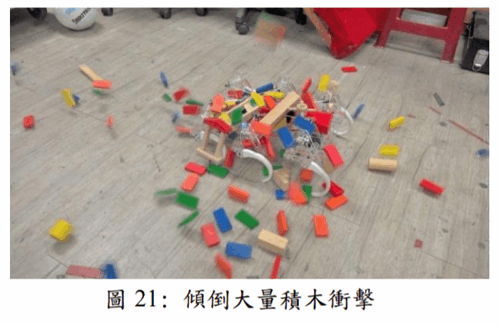
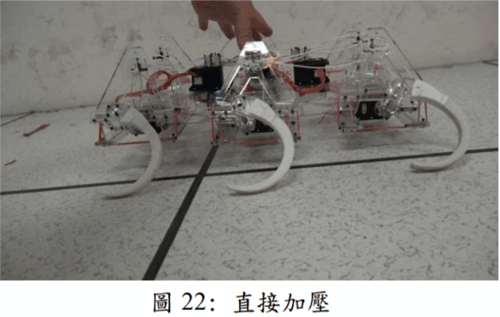
4.4機器人抗擊測試
模擬機器人在外執行任務時受到外力撞擊的情景。有C形構造、特殊可彎曲之懸吊腳結構,受衝擊時,足部力量不會直接傳輸到馬達上,部分會
被避震器吸收,降低機器人在運作中損壞的機率。
5.結論與未來發展
本文從機構設計程式撰寫到製作成型皆自行加工完成,以低成本製作出具高速移動性與越障能力的智慧型機器人,結合生物力學、機器人運動學、昆蟲結構、動物結構等理論及技術。本文?仿昆蟲型六足機器人?使用特殊C型足部、機身結構與控制方式,使機器人同時具有輪型機器人高速移動性,以及足型機器人的跨越能力,機器人可在沙地、草地、泥地、斜坡、樓梯、水中甚至倒塌瓦礫中快速移動,是一般履帶機器人與輪型機器人無法做到的。體積小具有較高速移動能力,能在狹窄地形中快速移動,可應用於原野偵察、沙漠偵察、生物偵察。未來可以結合影像辨識與感知系統使用者可透過遠端控制介面,清楚了解機器人所在環境資訊以及前方影像。
(本文作者為國立虎尾科技大學電子工程系王榮爵教授、何懿山、楊琮閔、李子彬、王瑋玨)
6.參考資料
[1]韓商Robotis公司網站資料
http://www.robotis.com/index/
[2]Robotis,“Robotis Premium Software
Programming Guide“,Robotis Planning Contents Department。
[3]Robotis,“Robotis Premium Easy assembly and program download“,Robotis Planning Contents Department。
[4]Saranli, U., Buehler, M.,
Koditschek,D.E.“RHex: A Simple and Highly
Mobile Hexapod Robot,” The International Journal of Robotics Research, 20 (7), pp.
616-631,2001.
[5]Holtek。”HT32F52342/52 Datasheet”
[6] 通訊技術-RS485通訊技術說明
http://www.lcis.com.tw/paper_store/index.ht ml
[7]遙控編/解碼模塊PT2262/PT2272電路
http://cocdig.com/docs/show-post-33930.html
[8]陳源林(2015)。HOLTEK 32-bit 微控制器應用 -C語言實例。新北市;全華圖書股份有限公司。