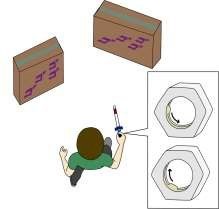
「触觉传递辅助听觉」:现今视障者白手杖的改良多半采用语音的方式告知使用者,在语音传递上有着诸多不便,为此我们改用触觉将讯息传递给使用者,当加上超音波感测器之白手杖侦测障碍物的同时 便会传递讯号给手环,手环再藉由滚动的方式告知使用者。
创作动机
现今的导盲手杖都以语音沟通为主,但若在人多嘈杂的公共场所便难以发挥效用,一方面是周遭杂音会干扰接收器,另一方面是视障者可能不想发出声响影响其他行人;为此我们设计出穿戴式体感手环取代语音,以触觉来告知使用者是否遭遇障碍物。
设计概念
导盲杖
以大多视障者使用的「白手杖」做为基底改良,加上两个超音波模组来感测前方60 度以及4公尺的障碍物的感测,再透过网路将障碍物的位置传到手环,此外更加上微电脑设计语音助理功能帮助视障者更了解室外状况。
智能手环
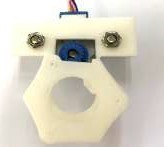
我们设计的手环和导盲杖,藉由步进马达的转动提供视障者回馈;当导盲杖上的超音波感测器感测到有障碍物时手环便会转动,会根据视障者前方 障碍物的位置及距离以转速不同之呈现方式反馈给使用者。
工作原理
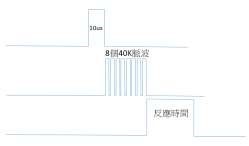
本作品藉由 HT66F2390 开发版输出 8 个 40kHz脉冲给两组超音波测距模组 HC-SR04,接收脚位(PA1、PA3)回传并记录反应的时间(量测到物体后反射回来后的时间),转换成真实距离,并藉由这两组距离值,经由程式逻辑控制步进马达 28BYJ-48(手环)如图 1 所示,判断给使用者行走方向,直 走、向左走还是向右走。
MCU主要核心功能
本作品运用到Holtek MCU的核心功能,HT66F2390 上的处理编程与指令,用作函式以及判断式处理;并运用计时模组计算超音波回传脚位时间以及马达运转时间;以乘除单元转换数据,以灵活的输入输出脚位控制步进马达,如图二所示。
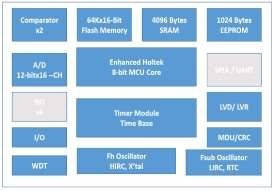
| 图二 : HT66F2390 核心功能 (蓝色为已使用、灰色为未使用) |
|
作品结构
感测端元件架构设计
本作品参考并改良论文[1]的设计,论文[1]所使用的感测元件有红外线如图三所示,红外线主要使用于手环转动时能精准控制其转动位置,由于我们考虑视障者携带简便的要素,将其改良为步进马达取代原本的红外线与 DC 直流马达。
MCU和周边元件相互关系
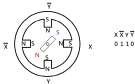
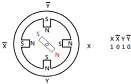
28BYJ-48步进马达大致上有四个输入端内部结构是以四个输入端分别接上线圈以制造磁场。首先,四个输入电压藉由线圈产生或改变四个方向的磁场,藉由磁场的改变,以达到控制步进马达转子的效果。步进马达的转子为永久磁铁,藉由电磁线圈控制转子角度,以达到顺时针旋转和逆时针旋转的效果。若要让马达待机,则令输入全为0,取消环境激磁。若要让马达逆时针旋转,则依序将相对应的,讯号以1001, 0101,0110, 1010 循环输入,则能让马达以 45度, 135度, 225度, 315度的顺序旋转,反之亦然,如图四~图七所示。