
未來的車輛除了肩負著實現二氧化碳中和移動的目標之外,還須具備自主、電動、互連等特性—而且車輛將透過軟體定義。本文探討3D模擬對於自動駕駛的重要性。
由軟體定義、自主、相連、且電動的未來車輛承諾協助實現共享的碳中和移動性。企業組織正投入數位能力來推動從設計最佳的機械至提供藝術境界的端到端移動性與數位服務的轉換。如此的願景代表著使用者經驗將相當大程度地透過軟體來定義。
為了實現這項願景,汽車產業正在自我重塑,將軟體視作未來價值的推手。由軟體來駕駛我們的車輛,同時在我們結束一通工作上的電話時,為我們在喜歡的餐廳訂好座位,這些動作全在車內完成。這樣的軟體有一個被稱為「自動駕駛軟體(autonomous driving software;ADS)」的重要元件,它被期待能夠無瑕疵的運作,讓搭乘者(已經沒有所謂的駕駛者)能夠有時間從事其他活動。
問題1:當前的自動駕駛團隊面臨哪些最大的挑戰?
答:自動駕駛車輛(autonomous vehicle;AV)領域在Level 4(L4)或Level 5(L5)自主駕駛化為可能之前有幾項需要被解決的挑戰和障礙。如同最近的IAA所示,有一部分公司已領先其他公司,更接近這些挑戰的解決方法,而且不是只有在美國,也快要開始在歐洲進行試驗。
這個領域的工程師會面臨下列幾項的挑戰:
*證明他們設計的ADS無害、安全且可靠:路上自動駕駛車輛(AV)不會造成意外是接受自動駕駛車輛公開運行的首要條件。ADS應要可靠且無害地在其操作適用範圍(operational design domains;ODDs)運作,才有讓AV行駛於路上的可能。如何打造無害、安全且可靠的ADS是當今的AV團隊所面臨的最重要的挑戰。
*以虛擬的方式測試車輛來涵蓋各種ODDs的大量情境:在真實世界進行ADS性能的檢驗,被普遍認為是不實際的作法。因此,工程師必須轉以虛擬的方式來測試ADS,在此,他們可以拓展測試範圍,同時進行幾千個模擬來證明—ADS在特定ODD的所有可能情境下,皆做出正確的決定。
問題2:3D駕駛模擬解決了哪些問題?
答:根據我們與全球主要汽車企業組織的合作時的觀察,許多汽車企業組織已經建立起解決他們的重大挑戰所需的能力與成熟度。這些挑戰卻在最近這段期間隨著科技的進步而加重,因為科技的進步帶來了新的架構與新的功能,這些通常需要仰賴與其他功能的整合。企業組織正將嵌入式軟體大規模的虛擬測試視為關鍵。3D駕駛模擬(3D Driving Simulation)軟體可協助設計場景與情境,讓ADAS可以在其中進行測試。這主要可以協助:
*藉由啟用早期的ADS封閉迴圈測試來縮短開發週期,包含ADS中的感知、規劃與控制軟體。
*透過虛擬測試來降低開發成本,並且提供一個無害的方式來測試所有可能的極端和危險情境。
*以虛擬的方式使用與真實世界關聯的場景來檢驗ADS,進而達到ISO 26262和SOTIF的要求。
問題3:設置駕駛模擬需要哪些步驟呢?
答:大致上會有以下幾項任務需要留意:
*準備一個虛擬的車輛模型。這通常會使用像是Simulink等工具。
*選擇一個正確的感測器模型並架設在虛擬車輛模型上。重要的是所選擇的感測器模型必須具備適當的逼真等級,讓它們對於3D世界的感知能夠比擬物理原型對真實世界的感知。
*使用RoadRunner等3D場景設計工具建立逼真的場景,並且確保這些場景符合自動駕駛車輛的目標ODD。
*依據測試策略設計駕駛情境。為了確保ADS的品質,用來模擬的情境必須高度與真實世界的情況相關。基於這點,有一些公司已經採取再刺激(restimulation)架構,這時虛擬情境是使用真實的測試駕駛產生資料,接著以該情境所有可能的變異來進行ADS和虛擬車輛的測試。
*將場景、情境與虛擬車輛模型匯入至一個駕駛模擬軟體,並進行ADS的模擬。
重要的是,要知道建立場景、選擇合適的感測器模型與設計涵蓋所有可能情況的情境是相當耗時的作業,通常需要幾週或幾個月的時間來執行。當虛擬的檢驗不斷地需要高品質的場景和人造物,許多現有的解決方案仍缺乏提供有效率的場景建立能力。
問題4:看起來正確地建立3D場景在ADS的測試扮演重要的角色,那麼現今的3D場景是如何建立的?
答:建立精確的3D場景是3D駕駛模擬當中的一個關鍵步驟。真實世界的點雲掃描、正攝影像(Ortho imagery)和其他的向量資料可作為參考依據,在設計3D場景時給予協助。
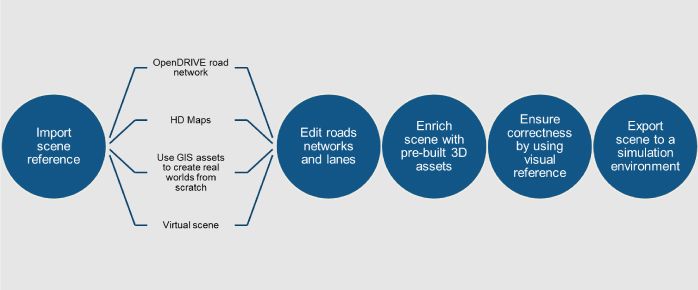
使用如RoadRunner等工具來建立場景的大致會有以下幾個步驟:
*從OpenDRIVE road network等幾種來源匯入參考場景,或者使用GIS資產從頭開始或透過現有虛擬場景來建立出真實世界場景。
*在匯入的場景中編輯相關區域的道路網路和車道,通常會以幾十或幾百公里的範圍執行。
*透過預先建立的3D資產,如建築物、植物、道路上的物體等等,讓場景更加豐富。
*使用如衛星成像(Satellite imagery)等虛擬參考,來確保場景的正確性。
*最後是將在RoadRunner建立的場景匯出為產業標準的格式,包含OpenDRIVE、FBX、gITF、OpenFlight、OpenSceneGraph、OBJ和USD。
|
問題5:使用RoadRunner等工具來設計場景有哪些重要的優點?
答:使用道路網路設計和場景建立的專門工具有許多優點,其中最主要的特點有:
*在RoadRunner建立的場景可以很輕易地匯出成常用格式,接著可以與大部分現成的駕駛模擬器整併。這可以使團隊保持高度的彈性。將場景設計作為商業用途的企業組織可以透過單一工具,將多個客戶設定為目標。RoadRunner Scene Builder可協助從HD地圖自動產生3D道路模型。RoadRunner的場景可匯出至各種模擬器和遊戲引擎,包括CARLA、Vires VTD、NVIDIA DRIVE Sim、Cognata、Metamoto LGSVL、Baidu Apollo、Unity、和Unreal Engine。
*RoadRunner Asset Library可以快速地使用逼真且視覺性一致的3D模型來填充3D場景。
問題6:駕駛模擬器通常會需要哪一種類型的資料?
答:通常來說,一個場景設計工具會匯出兩大類的資料:
第一類是幾何網格(geometric mesh):例如道路、路緣、地形、和場景內的物件。這類資料由攝影機、光達、雷達等感測器模型做使用。
第二類是語意資料(semantics information):通常會被匯出為OpenDRIVE格式。語意資料常使用於規劃演算法的設計和檢驗。
依筆者經驗,單單一家企業組織內的不同團隊,也時常使用不同的駕駛模擬器。在這樣的情況,如果有方法可以只建立一個場景,並使用該場景作為所有模擬器的單一真實來源會有很大的幫助。
問題7:高度細緻的地圖對於此領域有多高的重要性?
答:當車輛逐漸跨越SAE自動駕駛等級的階梯,現今主要的自動駕駛團隊考量了HD地圖,作為完整自動駕駛架構的一部分。HD地圖(High-Definition Maps,高解析度地圖)提供了高度準確的道路和車道地圖,包含環境的高逼真度,例如精確的斑馬線位置、紅綠燈、道路彎曲度(curvature of the road)、轉彎半徑(turn radius)、障礙等。這些地圖的精確程度通常可以達到以公分為單位或甚至更小。自動駕駛車輛需要HD地圖來處理感知演算法的不一致性,就像是人類在跟隨GPS的時候一樣。
廣泛來說,HD地圖可以提供下列協助:
1.定位(localization):作為透過感知和感測器融合演算法建立的環境模型的參考
2.規劃(planning):HD地圖中的詳細資訊可幫助駕駛策略功能依據現有情境來規劃路徑
3.軟體測試(software testing):在開發軟體時,HD地圖可協助建立代表真實世界的虛擬場景,該場景也能被用來測試ADS。
過去十年來,有一些新的機構組織為工程團隊和車隊業者(OEMs)開啟了HD地圖的新商業模式。但是由於HD地圖的建立和維護所涉及的成本,至今仍未普及,因為不像車輛中常見的GPS地圖只需要幾個月更新一次,HD地圖每過幾週就必須進行更新。
問題8:是否有客戶使用案例(參考)可以分享?
答:在今年的MathWorks汽車年會(MathWorks Automotive Conference),Porsche Engineering Services談論到Porsche Engineering ADAS Testing Centre(PEVATeC)的工程師如何整合最佳的工具、資料來源、以及車輛與ADAS的經驗,建立並提供一個靈活的模型化模擬平台,以支援端到端的ADAS/AD開發。
問題9:3D模擬可如何運用在自動駕駛演算法訓練?
答:使用錄製資料的限制,在於這類資料只能被使用在真正以錄製方式建立的情境。演算法開發人員除了錄製資料之外,還會需要合成資料來測試難度高、具危險性或鮮少發生的案例。透過攝影機、光達、雷達或其他感測器,如IMU和GPS所適用的模型,工程師可以透過3D模擬來整合3D場景與他們的開發環境,如MATLAB與Simulink,來獲得合成資料。開發人員也可以重新產生錄製資料,來啟動錄製案例變異的測試。
問題10:MathWorks在此領域即將提供哪些新的支援呢?
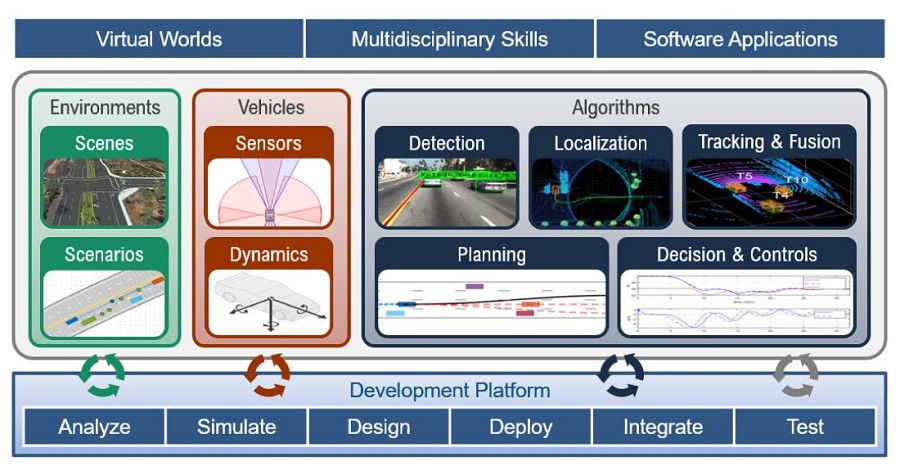
答:幾波趨勢正推推動著MathWorks的投資。首先是對於虛擬世界的需求。為了要減少針對難以在真實世界建造或可能有害的情境進行車輛測試與探索,產業對於模擬的採用持續增加。MathWorks提供工具協助進行場景、情境、感測器和動態的設計與模擬。
|
第二波推動MathWorks投資的趨勢是對於結合多門學科的技能需求。開發包含自動駕駛應用需要規劃、控制和感知等規則的多項技能,像是偵測、定位、追蹤、與融合。MathWorks提供專門的工具箱來幫助學習及運用這些規則。在整個開發過程中可以使用這些工具箱的指標和分析功能。
第三波推動投資的趨勢是對於軟體的需求。MathWorks在這方面的投資主要在於加強平台的工具,幫助使用者進行嵌入式軟體的設計、部署與測試。
(本文由鈦思科技提供;作者Gaurav Tomar任職於MathWorks公司)
Smart Energy:數位電錶除了量測電壓和電流外,還需要什麼強大的功能?
Microchip 推出的全新加強型智能電錶解決方案,擁有複雜且精準的計量韌體,並支持基礎的電錶應用。此方案在數位電錶數據傳輸方面,既可以通過電力線傳輸,也可以使用藍牙…
Microchip 推出的全新加強型智能電錶解決方案,擁有複雜且精準的計量韌體…