1. 前言
人類因醫療科技快速的發展,壽命能比以往更長更久;隨著老年人口的不斷增加,相對的輪椅的發展也日趨重要了,然而對於這些年長而行動不便的使用者而言,輪椅及輪椅輔具已成為生活中不可取代的代步工具(徐正會、陳國桂 2007)。一般市售的輪椅在發生碰撞之後卻沒有相關的安全保護措施裝置來保護乘坐在上面的使用者,因為外面所販售的輪椅並沒有加裝安全裝置,只有簡單的像是折彎手把、殺車裝置、坐椅等相關設備(楊茗棠、黃保山 2005,張鳳珠2008,張鳳珠 2010),都是需要他人從旁協助行動才能確保安全。
有關電動輪椅速度控制增加使用時之安全性的研發,列舉如下:劉虣虣、廖進榮、林聖賢 (2000) 發明一種電動輪椅車安全輔助煞車裝置,於輪椅馬達設有電磁煞車器、減速機構及馬達電樞電路,使輪椅可藉由電磁煞車器鎖住馬達,進而達到輔助煞車及確實增進行車安全之目的者。謝世甲、林倚男( 2005) 發明一種電動輪椅之定速控制裝置,可將一電動輪椅之速度控制在一定範圍內,當該電動輪椅設置有此定速控制裝置時,可提升乘坐者行進之操控性、安全性與舒適性,更提昇產品的競爭力。林梅英(2007)發明一種電動輪椅之控制方法,,該電動輪椅控制器係以實際偵測到的脈波數變化比較判斷電動輪椅目前是處於平地行進的狀態還是處於上/下坡的狀態;如處於平地行進狀態則控制程式跳回正常速度控制迴路繼續執行;如處於上坡或下坡狀態,則控制程式跳至上坡或下坡判斷式中進行比較與判斷;藉此,以供控制電動輪椅順暢地行進於各種坡段者。郭永吉、謝世甲、吳盈達、涂世旺(2009) 發明一種電動輪椅之方向速度控制裝置,可以在上下坡時都能控制提供適當的動力,進而令該電動輪椅於高低起伏、顛簸不定的地面移動時,也能維持適當速度且保持整體穩定性。
輪椅乘坐者通常體弱多病,反應較慢,手動輪椅遇到下坡的時候有可能會來不及反應,或者是根本來不及剎車,對老人家或者是上肢比較沒力者一直用手去剎車其實是很吃力的,而且手掌也有可能因為這樣而受傷。本作品之研發動機在於發展出一套輪椅下坡定速裝置,使手動輪椅在下坡路段時,能以定速來行駛,增加輪椅下坡的安全;另一設計乃在椅子下方設置重量感測裝置,扶手上設有煞車控制按鈕,用以控制煞車系統,平常無人乘坐時,煞車鎖住以利使用者乘坐或起身,輪椅不會滑動。當重量感測裝置偵測到乘坐者之重量並由扶手上的煞車控制按鈕解除煞車,煞車系統才會關閉,輪椅可以開始行駛。而在非乘坐狀態下,使用者若想移動輪椅,可操作椅背手之按鈕開關,解除煞車系統,把輪椅移至其他地方。
2. 工作原理
2.1 工作原理及功能
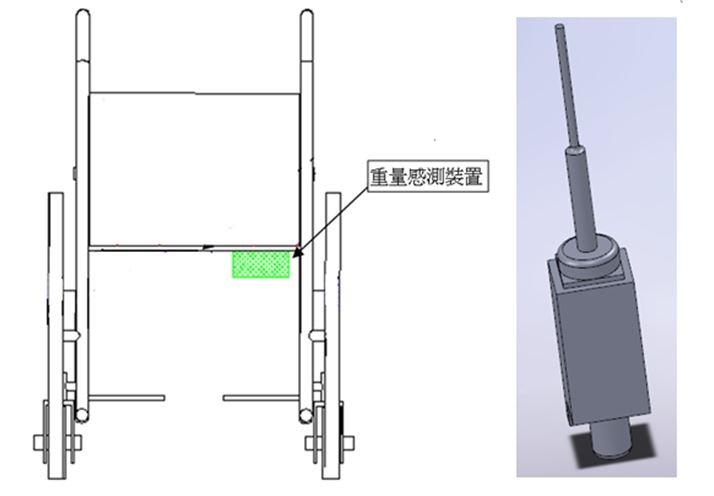
本研究主要功能乃在於運用一些設計巧思,為達到乘坐者確實已經坐上輪椅才能行走,所以在椅子下裝有重量感測裝置來確認乘坐者是否坐穩,乘坐者確定坐好,即可自行解除扶手上的煞車按鈕,輪椅才可以移行。輪椅在下坡路段時,能以定速來行駛,增加輪椅下坡的安全。此輪椅下坡定速裝置具有偵側路面環境,斜坡角度及輪椅行駛速度等功能,將此測量資料經由控制晶片運算處理後,產生控制訊號驅動煞車裝置,產生適當之制動力,達到定速效果,增加輪椅下坡時之安全性。「輪椅下坡定速裝置」,以加速度規測量斜坡角度,光編碼器測量輪椅速度,將此測量資料送往控制晶片,產生控制訊號驅動定速裝置達到定速效果。
2.2 主要核心功能
本作品採用盛群HT66F50控制IC之數位與類比輸入功能讀取重量感測裝置,斜坡角度及輪椅行駛速度等資訊,此測量資料經由HT66F50控制晶片運算處理後,產生控制訊號驅動煞車裝置,產生適當之制動力,達到定速效果,增加輪椅下坡時之安全性。
3. 作品的結構
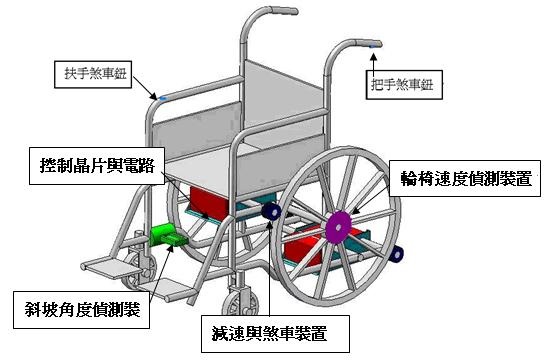
本文主要特色包含:斜坡角度偵測裝置,輪椅行駛速度偵測裝置,HT66F50控制晶片與電路及減速裝置。分述如下:
3.1斜坡角度偵測裝置
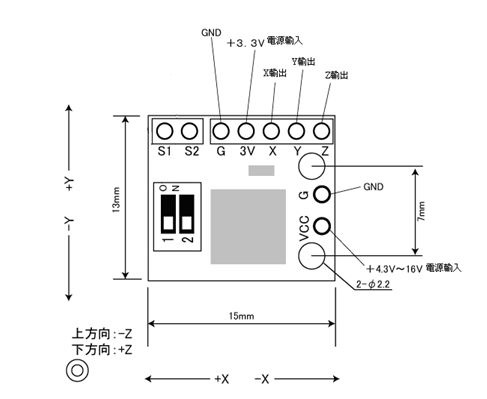
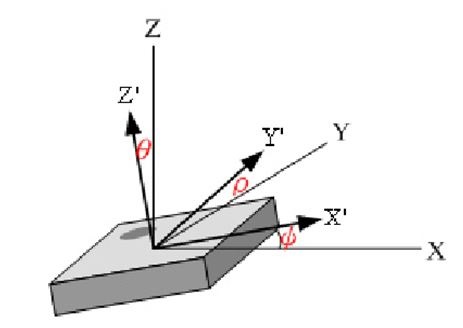
輪椅內加速規是用來偵測路面的角度,當路面傾斜時,加速規測得重力加速度之類比訊號可轉換成傾斜角度。
3.2輪椅速度偵測裝置
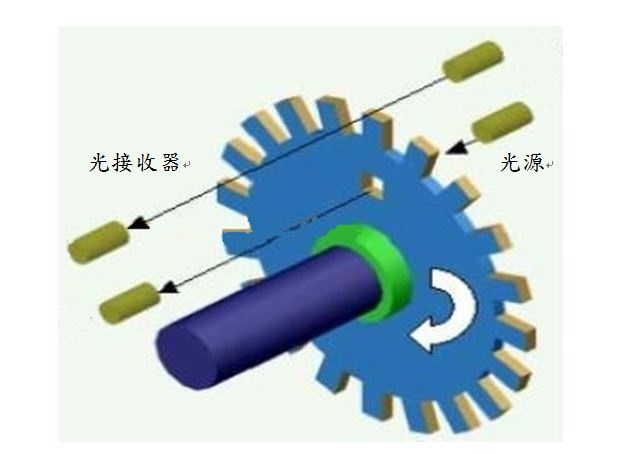
輪椅行駛速度由光學編碼器偵測,光學編碼器主要構成為一個可旋轉圓盤,其周圍邊緣有許多細縫之槽孔。在圓盤的一側放置光源,另一例放置光感測器。當圓盤旋轉時,光感測器即接收到on-off的脈波,計算脈波的速度,即可計算出輪椅行駛速度。
3.3減速與煞車裝置
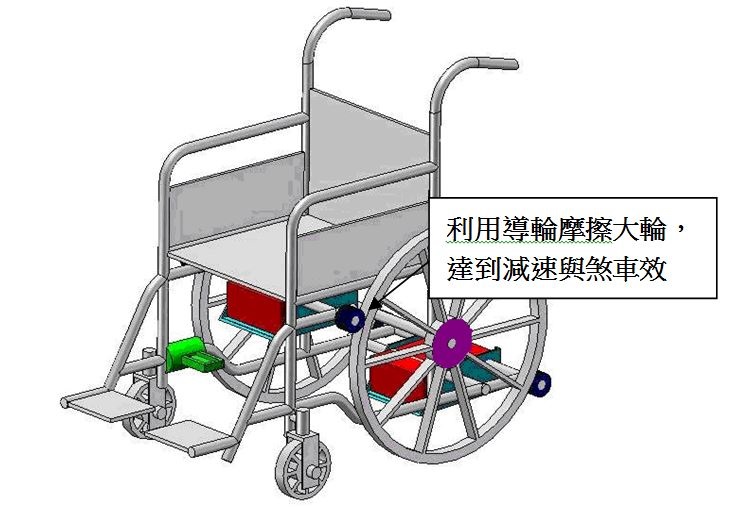
輪椅在下坡的時候,摩擦輪利用馬達反轉的動力,增加摩擦輪與輪之間的摩擦力,讓大輪可以減速,而維持同樣的速度。
3.4煞車控制裝置
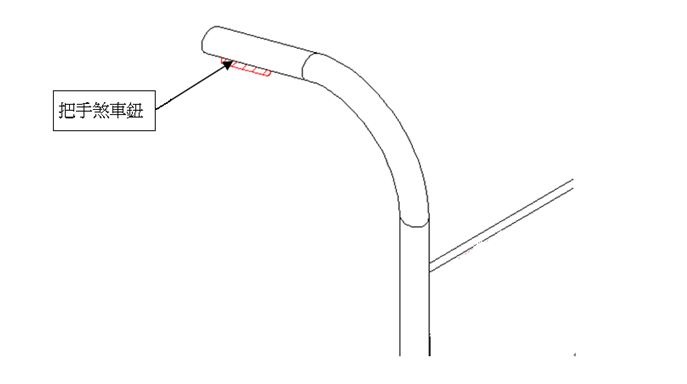
包括把手與扶手設有煞車控制鈕,可控制煞車,讓使用者乘坐或起身時,輪椅不滑動,避免發生跌倒碰撞。。結合以上安全裝置,便可大大提升輪椅使用者的安全性與便利性。
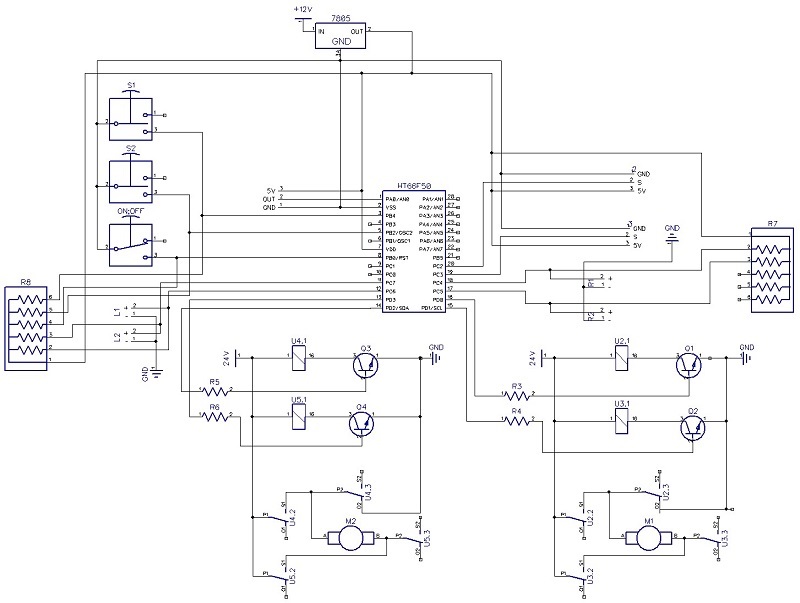
3.5控制晶片與電路
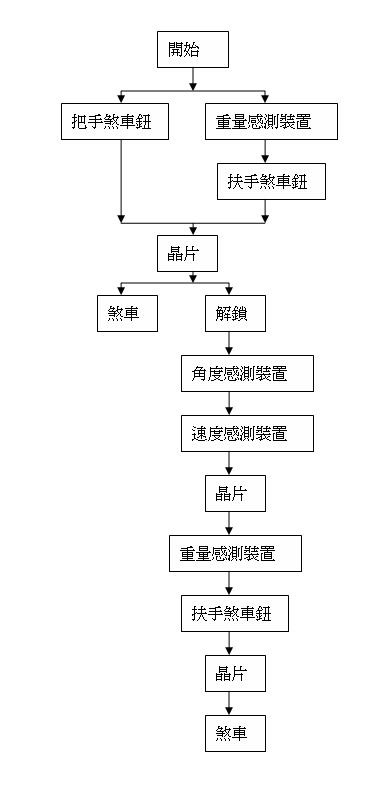
包含一單晶片微控器及感測器與驅動器之控制電路。本作品之程式架構與線路圖(如圖8、9所示)。
4. 測試與結果
本作品實體圖及各裝置所在位置。
4.1測試項目
1. 本組作品是從一般市面上的輪椅上發現出來的缺點,加以改良成具備有高度安全並且成本較低的優良安全輪椅。
2. 以加速規偵測路面的角度,並依路面之傾斜度訂定輪椅行駛之速度上限。
3. 以光學編碼器正確回授輪椅之行駛速度。
4. 輪椅之定速可由控制器,馬達與煞車完成。
5. 經實際測試本作品可達到於不同之斜坡產生不同之煞車力以維持行駛時之速度。
6. 重量感測裝置用以辨識上方是否有乘坐者,配合扶手設有煞車控制鈕,可控制煞車,讓使用者於乘坐或起身時,輪椅不滑動,避免發生跌倒碰撞。
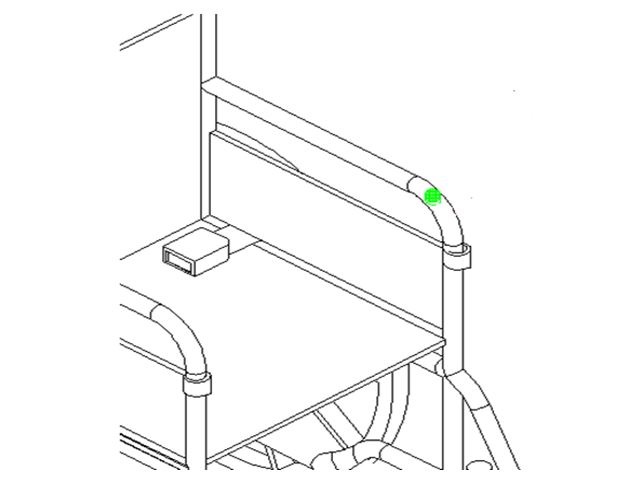
7. 在無乘坐狀態下,使用者想要移動輪椅,在椅背上的手把有一個按鈕開關,同時按住開關可把初始的煞車系統解除,以達到輪椅移至其他地方。
4.2結果
現今許多公共場所例如學校,公園,公家機關等…所設置的殘障坡道斜度都不一樣,有些斜坡角度太大的時候,會導致身障者發生翻車的危險。另外,戶外休閒場所存在著更多危險環境,若無良好的安全裝置將嚴重影響老年人外出的意願,所以我們設計這種減速的裝置可以大幅減少意外的發生,讓使用輪椅的身障者或是高齡者有更安全的保障,也會讓他們更樂於外出。享受美好的戶外休閒活動。
本文作者為:南開科技大學 自動化工程系:沈明河 教授、林政萱、陳致誠、陳世恩、王碩廷