NVIDIA在ROSCon 2022大会宣布推出最新Isaac ROS软体 Developer Preview(DP)2版本,在该版本中加入用於自主移动机器人(AMR)机队的云端与边缘机器人任务管理与监控全新功能,以及其他供ROS 2开发人员使用的功能。
 |
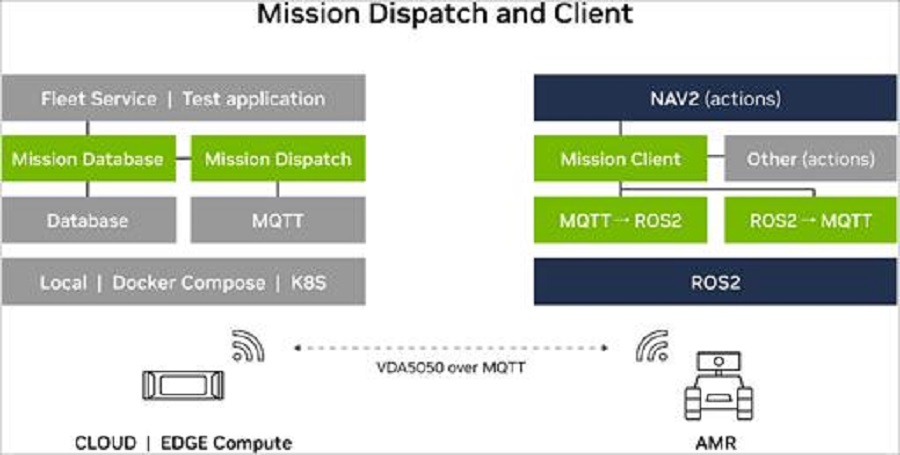
| Mission Dispatch与Mission Client软体的架构 |
NVIDIA Isaac ROS内有单独的套装软体(GEMs)与完整的作业流程(NITROS),以加速硬体效能。此外,新版本亦加入以下功能:
Mission Dispatch与Client:这个开放原始码的CPU软体包用於从机队管理系统向机器人分配任务并进行监控。Mission Dispatch功能是一项云端原生微服务,可以与更大规模的机队管理系统结合。
FreeSpace Segmentation:此硬体加速包适用於在机器人附近产生一个基於视觉人工智慧(AI)的占据网格(occupancy grid),作为导航堆叠的输入项目。
H.264影像编码与解码:用於录制和播放压缩影像资料的硬体加速包。收集影像资料是训练AI感知模型的重要环节。在NVIDIA Jetson AGX Orin平台上,使用两个1080p解析度的立体摄影机,以30fps(总共>120fps)的画面更新率测量这些新的GEM执行表现,资料占用空间降低约十倍。
Mission Dispatch与Client提供标准的开放原始码方式,分配与追踪机队管理系统及ROS 2机器人之间的任务。Dispatch与Client使用专为机器人机队设计的开放通讯标准VDA5050进行沟通,并藉由用於物联网(IoT)应用的羽量级讯息传输协定MQTT以无线方式传递。
Mission Dispatch是一个容器化的微服务,可从NGC下载,或是当成Isaac GitHub上的原始程式码,并且可与机队管理系统整合。Mission Dispatch已通过验证,可以和其他开放原始码ROS 2用户端互通,像是日前宣布由OTTO Motors和InOrbit共同开发的VDA5050 Connector。
Mission Client相容於ROS 2 Humble,在Isaac ROS GitHub中作为一个软体包并与Nav2导航堆叠预先进行整合,以分配及追踪机器人上的导航和其他任务。
OTTO Motors技术长Ryan Gariepy表示:「随着现实环境中移动机器人加速部署,互通性的重要程度日益提升。将VDA5050与ROS2串连成一个开放原始码社群,将促进机队管理解决方案创新,并让机器人制造商能够着重在差异化发展。」
NVIDIA Isaac ROS不断为ROS 2开发人员社群提供硬体加速效能,用於AI感知、影像处理与导航。自主机器人须具备先进的AI和电脑视觉功能,Isaac ROS代表着NVIDIA的承诺,我们将让机器人社群的开发人员更容易采用这些顶尖技术。