近期,由賓州州立大學(Penn State)領導的國際研究團隊成功開發出一款柔軟且可磁控的微型機器人,展現出在醫療與工程領域的廣泛應用潛力。這種機器人能夠靈活穿梭於狹小空間,未來可望應用於地震救援與人體內部手術等場景。
 |
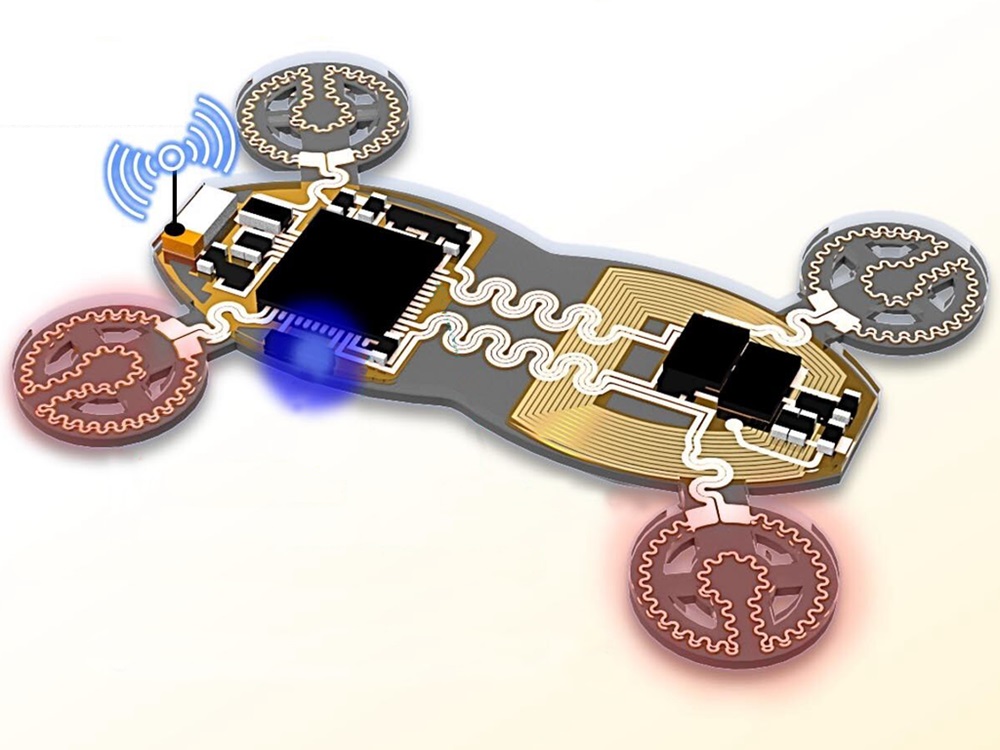
| 賓州州立大學研究團隊成功開發柔軟可磁控的微型機器人(圖片:賓州大學) |
這款微型機器人採用柔軟材料製成,模仿生物體的運動方式,具備爬行、扭轉與滾動等多種移動模式。研究團隊在其結構中嵌入硬磁性材料,透過外部磁場的調控,精確控制機器人的運動方向與速度。此外,機器人內部整合了柔性電子元件,能即時監測環境變化,並傳輸相關數據。
在醫療領域,這種微型機器人有望應用於非侵入性手術與藥物遞送。其柔軟且可控的特性,使其能夠在人體內部複雜的環境中移動,精確地將藥物送達特定位置,或執行微創手術操作,減少對患者的傷害與恢復時間。
在工程與救災方面,這款機器人可應用於地震後的搜救行動。其小巧靈活的特性,使其能夠進入瓦礫堆中的狹小空間,搜尋受困者並傳輸其位置資訊,協助救援人員迅速定位與救援。
研究團隊表示,未來將持續優化機器人的設計與功能,提升其在各種環境中的適應能力與操作精度。隨著技術的進步,這種磁控軟體機器人有望在醫療、工程與救災等多個領域發揮重要作用。