BLDC馬達依靠外部控制器來達到換向,亦即在馬達相位中切換電流以產生運動的過程。本文將說明BLDC馬達的基礎知識、瞭解BLDC馬達常用的換向方法,並介紹一種收集位置回饋的新解決方案。
無刷直流電動馬達(BLDC馬達),屬於電子換向馬達,由DC電源透過外部馬達控制器進行驅動。BLDC馬達與有刷馬達不同,需依靠外部控制器來達到換向,這是指在馬達相位中切換電流以產生運動的過程。
有刷馬達具有實體電刷,每次轉動可執行此過程兩次,但BLDC馬達則沒有,也因為此設計本質,可以有任意數量的極對以進行換向。本文將回顧BLDC馬達的基礎知識、瞭解BLDC馬達常用的換向方法,並介紹一種收集位置回饋的新解決方案。
BLDC馬達換向基礎知識
BLDC馬達最常見的配置是三相。相數與定子上的繞組數相符,而轉子的極對數不拘,視應用而定。由於BLDC馬達的轉子會受到旋轉的定子極點影響,因此必須追蹤定子極的位置,以有效驅動馬達的三個相位。因此,會使用馬達控制器在馬達的三個相位上產生六步換向模式。這六個步驟(或稱換向階段)會讓電磁場移動,進而讓轉子的永久磁鐵移動馬達機軸(圖1)。
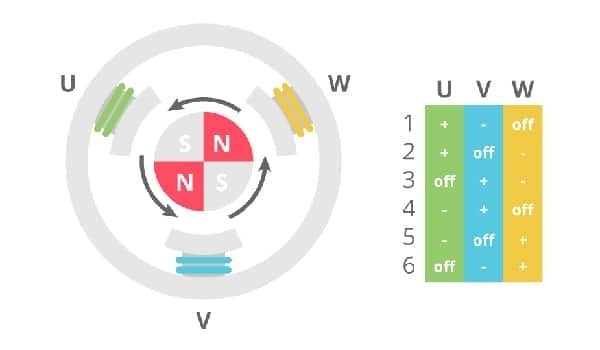
| 圖1 : BLDC馬達換向的六步模式。(source:CUI Devices) |
|
為了讓控制器有效地進行馬達換向,必須對轉子的位置隨時掌握準確的資訊。自無刷馬達問世以來,霍爾效應感測器一直是換向回饋的常用選擇。在典型情況下,三相控制需要三個感測器。將霍爾效應感測器會嵌入到馬達的定子中,偵測轉子的位置,藉此在三相橋中切換電晶體,以便驅動馬達。三個感測器的輸出通常標註為U、V與W通道。
然而,這種位置回饋方法有一些缺點。雖然霍爾效應感測器的BOM成本較低,但將這些感測器整合到BLDC中的成本會讓馬達的總成本翻倍。此外,控制器只能從霍爾效應感測器取得馬達位置的部分樣貌,可能會導致系統問題,因為需要有精密的位置回饋才可正確操作。
編碼器可提供更高精度
在當今世界,使用BLDC馬達的系統需要比以往更高的位置測量精度。為此,除了霍爾效應感測器外,BLDC馬達還可以搭配增量編碼器使用。如此就可讓系統改善位置回饋,但也造成馬達製造商要在馬達中添加兩個霍爾感測器,並在組裝後添加一個增量編碼器。有個更好的作法是摒棄所有霍爾效應感測器,並用換向編碼器代替增量編碼器。這些換向編碼器,例如CUI Devices的AMT31系列或AMT33系列,具有增量輸出,可達到精確的位置追蹤,還有換向輸出,可配合馬達的特定極點配置。
CUI Devices 的換向編碼器採數位架構,可對這些參數進行編程,包括極數、解析度和方向。這可讓工程師在原型設計和測試期間享有靈活性,並可在多個設計間減少編碼器SKU數量。
換向馬達對準
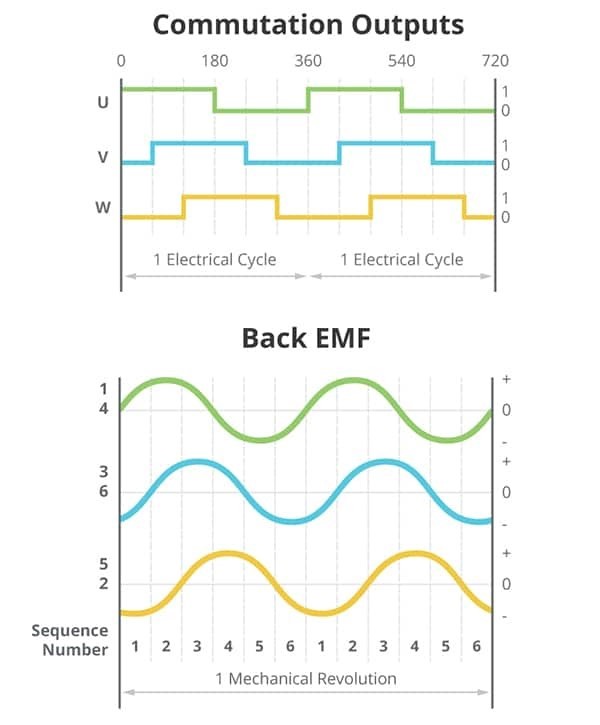
當電流施加到馬達上時,馬達會旋轉,相反地,轉動馬達時,就會產生電流。若轉動 BLDC 馬達,可看到類似於以下圖 2 的三相輸出。為了將換向編碼器甚至霍爾效應感測器正確對齊 BLDC 馬達,產生的換向波形應對齊反電動勢。傳統上,這會導致反覆過程,需要第二個馬達來驅動第一個馬達,也需要示波器來觀察波形。這可能非常耗時,也會在製造過程中增加大量成本。
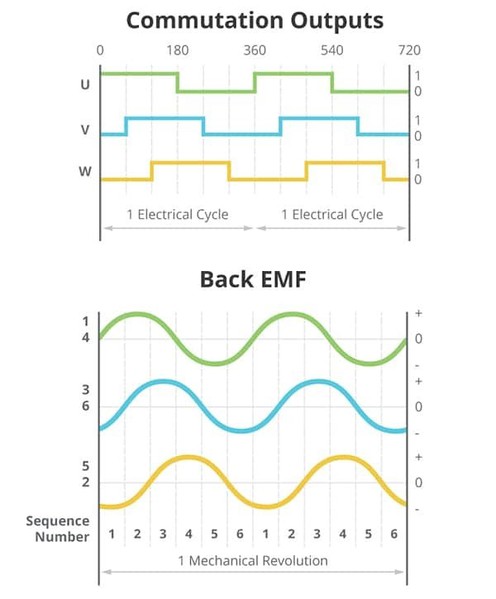
| 圖2 : 換向輸出和馬達相位(source:CUI Devices) |
|
透過AMT電容式編碼器,對齊過程幾乎即時完成,且僅需一個電源供應器即可。安裝編碼器後,使用者只需供電給兩個相位,即可對應到所需的AMT編碼器起始位置,並可傳送演算法命令。如此一來,使用者基本上已經設定了編碼器換向波形和馬達反電動勢波形的起始位置。
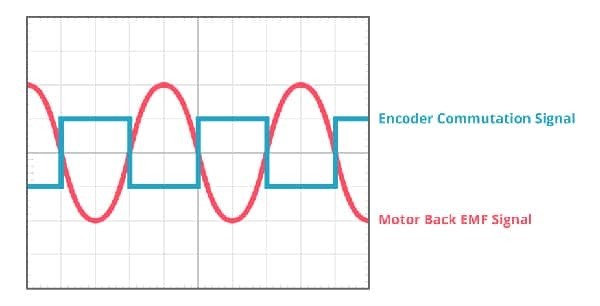
除了可簡化對齊作業,AMT編碼器的換向訊號也更精準對齊馬達極點。將換向編碼器對齊馬達就會設定起始位置(即換向波形開始的位置)。如果操作得當,換向波形應與馬達的反電動勢波形完美匹配。然而,這並非總是可達成。與霍爾感測器或光學編碼器的典型對齊程度約在±1電度。
另一方面,AMT編碼器可達到更高的精度,通常在±0.1電度以內。當U和W都在高電位時(上述波形中的第三種狀態),AMT編碼器的波形就會開始;洽詢馬達製造商可以瞭解適用的反電動勢圖,以判定要在對齊期間對哪些相位通電。
AMT換向編碼器的方向設定
除了可編程的極數和解析度功能外,AMT系列還針對換向應用提供方向設定;其他大多數換向編碼器製造商皆未提供此獨特選項。簡而言之,可透過此方向瞭解編碼器機軸應朝何方向轉動,以便換向訊號前進。通常,換向編碼器會放置在馬達的後軸上。
在此情況下,當馬達逆時針旋轉時(從馬達背面觀察),換向訊號會依序其狀態前進。但是,若將編碼器放在前軸,基本上就是將編碼器顛倒,因此當您逆時針轉動馬達時(從後面看),編碼器的機軸實際上是順時針旋轉(從編碼器由上往下觀看)。這意味著馬達的極點與編碼器的極點旋轉方向相反,如圖3所示。
若是不含此可編程選項的其他技術,則需要實體切換編碼器碟盤或U、V、W通道,才能完成相同的任務。若應用採用多個BLDC馬達且有多種方向需求,此可編程特點就相當實用。
| 圖3 : 換向波形與反電動勢相反(source:CUI Devices) |
|
結論
BLDC馬達的應用範圍不斷增加,若提供嚴密的控制迴路和高精度的位置感測回饋,就可在眾多應用中達到傑出表現。霍爾效應感測器因為具備低BOM成本的優勢,多年來一直是首選的解決方案,但除非搭配增量編碼器使用,否則通常無法提供馬達位置的全貌。
然而,CUI Devices的AMT換向編碼器可提供多功能合一的解決方案,完全無需使用霍爾效應感測器和增量編碼器。CUI Devices的AMT31或AMT33換向編碼器具備靈活的可編程能力,且安裝簡便,因此是市面上最多用途的選擇。透過本文提供的換向編碼器基本原理,有助於在未來的BLDC馬達專案中優先挑選此元件。
(本文由Digi-Key Electronics提供;作者Barley Li為APAC技術內容應用工程經理)