隨著晶圓尺寸的逐漸增大,對高精度、大範圍運動控制的需求也顯著提升。本文說明透過雷射干涉儀選用裝設有內建增量式光學尺的商用線型馬達移動平台,搭配驅動控制器進行定位精度的分析與比較,干涉儀所量測到的位移數據將回授到驅動控制器進行即時回饋補償,以確保每次平台移動到定位時的精準度,以驗證其性能優勢。
隨著現今台灣半導體產業持續邁向更高的量測精度、運作效率及系統整合控制,提升奈米級精準定位的需求變得日益迫切。在當今EUV和E-beam技術的快速發展下,實現晶圓、光罩、光學元件等設備是否可以達成奈米級精密定位成為關鍵挑戰。特別是在高速且大範圍的移動應用中,實現奈米級精度不僅要求卓越的運動控制系統,還需能在半導體製程中應對超高真空(UHV)、高潔淨環境和高溫等苛刻條件。
隨著晶圓尺寸的逐漸增大,對高精度、大範圍運動控制的需求也顯著提升。為解決這些挑戰,德國Attocube公司IDS3010雷射干涉儀提供最佳化的解方。以Fabry-Perot干涉原理為基礎,IDS3010不僅具備皮米級解析度,能以奈米級準確度進行位移檢測,並提供即時訊號補償回授運動控制,更具備高達25 MHz的數據輸出頻率,能夠與市售驅動控制器的最高信號解析度相匹配,滿足精密控制的需求。
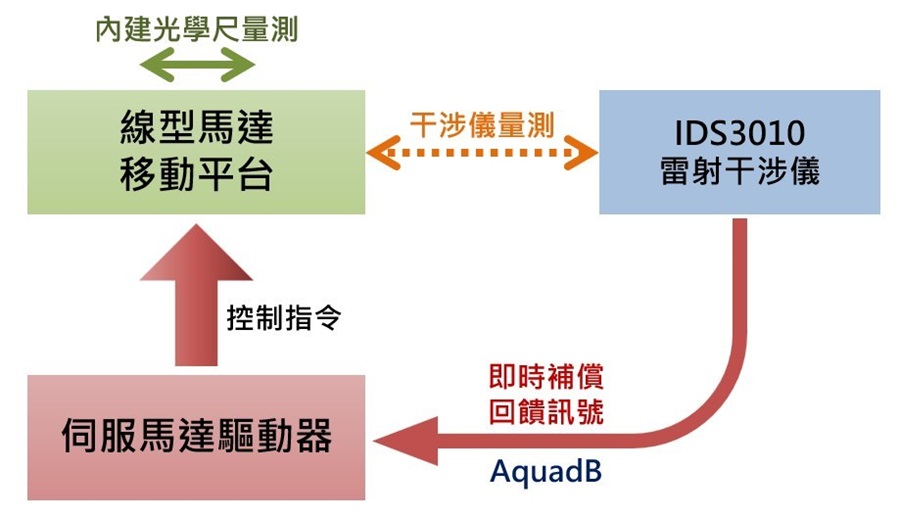
本次實驗中,選用裝設有內建增量式光學尺的商用線型馬達移動平台,搭配驅動控制器,並架設IDS3010干涉儀進行移動平台外部量測。同時IDS3010干涉儀所量測到的位移數據將回授到驅動控制器進行即時回饋補償,以確保每次平台移動到定位時的精準度。最後,依照ISO230-2:2014標準量測方法,分別對平台內建光學尺與IDS3010干涉儀進行定位精度的分析與比較,以驗證其性能優勢。
實驗硬體設備
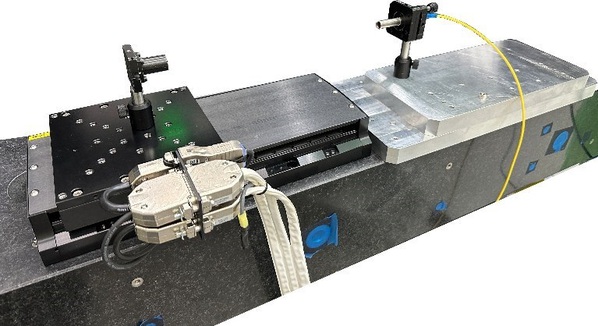
本次實驗選用一般市售商用規格的線型馬達移動平台並協同均華精密工業股份有限公司技術開發合作線型馬達驅動控制方法來進行同步整合,量測部分除了移動平台內建裝設有增量式光學尺外,同時使用德國attocube公司所生產的IDS3010雷射干涉儀來進行平台位移量測及即時信號回饋補償輸出至控制器。
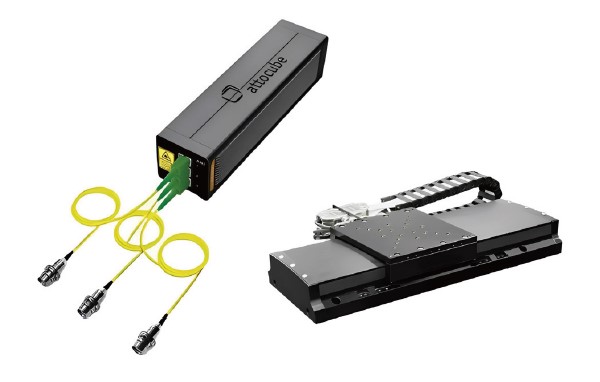
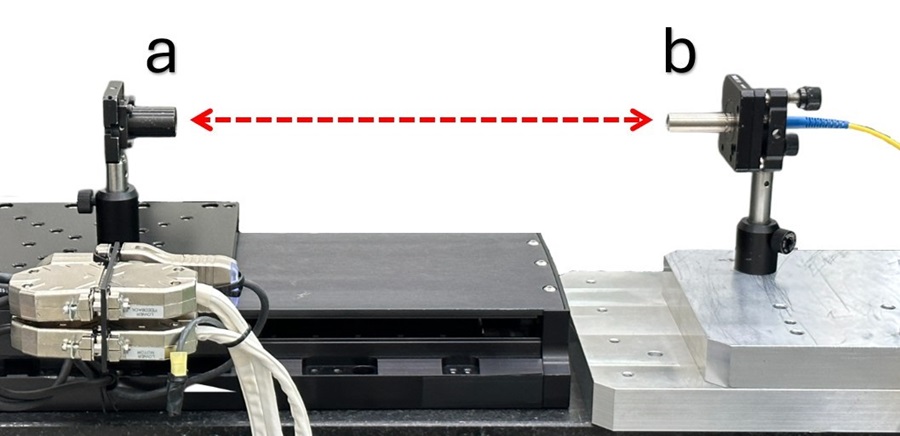
| 圖一 : IDS3010雷射干涉儀(左)、線型馬達移動平台(右) |
|
量測設備架設
1.將線型馬達移動平台與伺服馬達驅動器進行連接,以驅動器指令控制平台的移動步進間隔與距離。
2.將IDS3010雷射干涉儀專用的復歸反射器固定裝設在移動平台上,進行平台往復移動時的干涉儀信號反射來源。
3.選用IDS3010干涉儀專用平行光束感測探頭,並且固定架設於移動平台外的任意位置,架設高度須與復歸反射器高度一致後,即可進行干涉儀雷射光的準直對位。

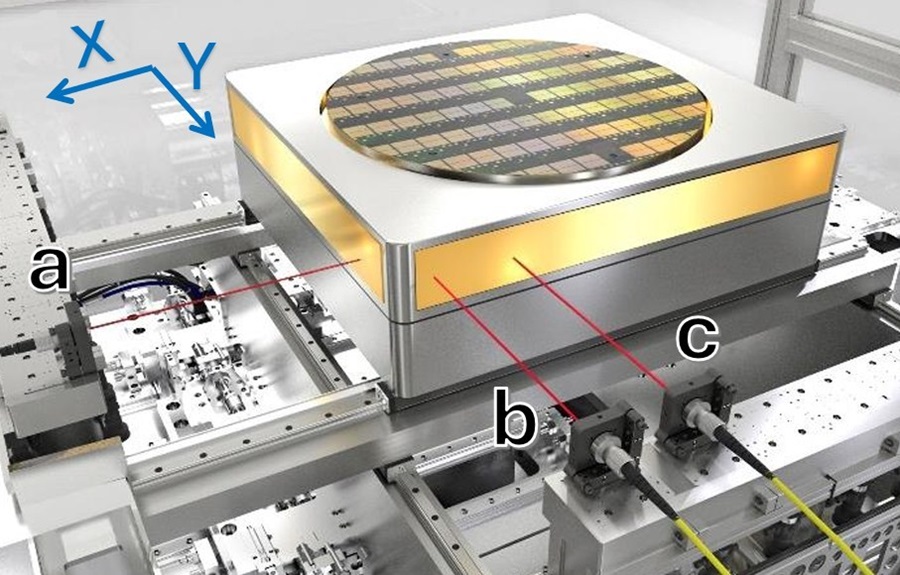
| 圖二 : 復歸反射器與感測探頭架設相關位置,a點為固定架設於移動平台上之復歸反射器,須與平台外b點感測探頭高度一致。 |
|
4.使用26pin HDR信號連接器將IDS3010干涉儀主機上的即時補償回饋輸出孔位接至伺服馬達驅動器。
5.將IDS3010干涉儀補償輸出訊號設定為AquadB (LVDS)格式,AquadB 介面的解析度可由使用者調整,範圍從 1 pm 到 64.93 nm(以 2^n 步驟進行編程,其中 n 為整數)。Clock最快的設定為 40 ns(即 25 MHz),最慢的設定為 10,240 ns(即 98 kHz)。在此實驗中,選定解析度設定:10nm及Clock:25MHz。
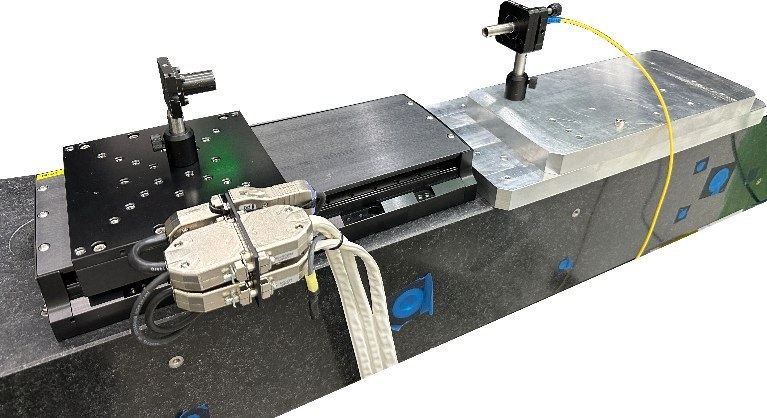
| 圖三 : 整體量測設備裝設於震動等級VC-E無塵室環境內。 |
|
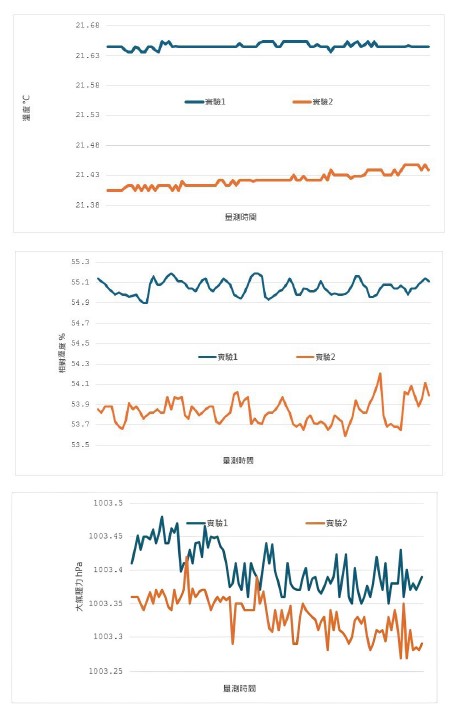
6.量測時環境參數:溫度為21.267°C;相對溼度為53.5%;壓力為1003.37hPa;量測折射率為1.000264。
量測步驟
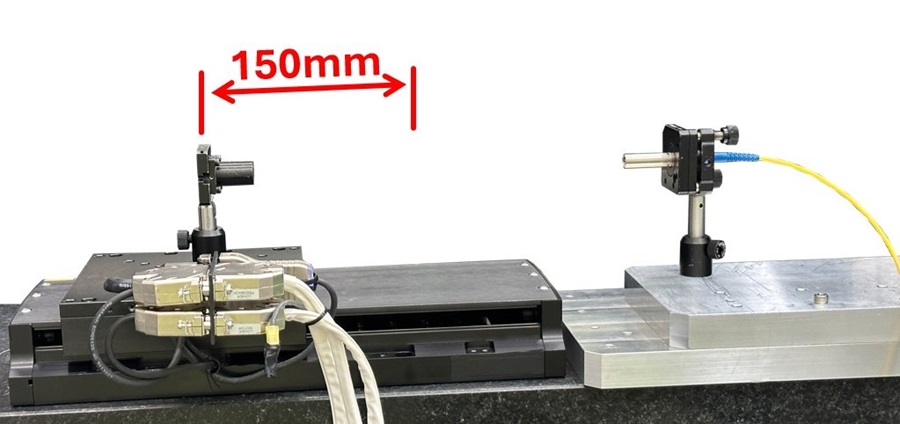
此量測實驗遵循ISO230-2:2014標準量測方法分別量測兩組數據進行對照,設定移動平台總行程為150mm,並以每10mm步進累積量測點。
‧ 實驗1:使用移動平台內建光學尺閉迴路補償訊號,並同時架設IDS3010輔助量測平台位移ISO230-2:2014數據。
‧ 實驗2:關閉移動平台內建光學尺閉迴路補償訊號,使用IDS3010進行平台位移量測,同時由IDS3010的即時補償量測訊號來進行移動平台的位置補正。
量測結果
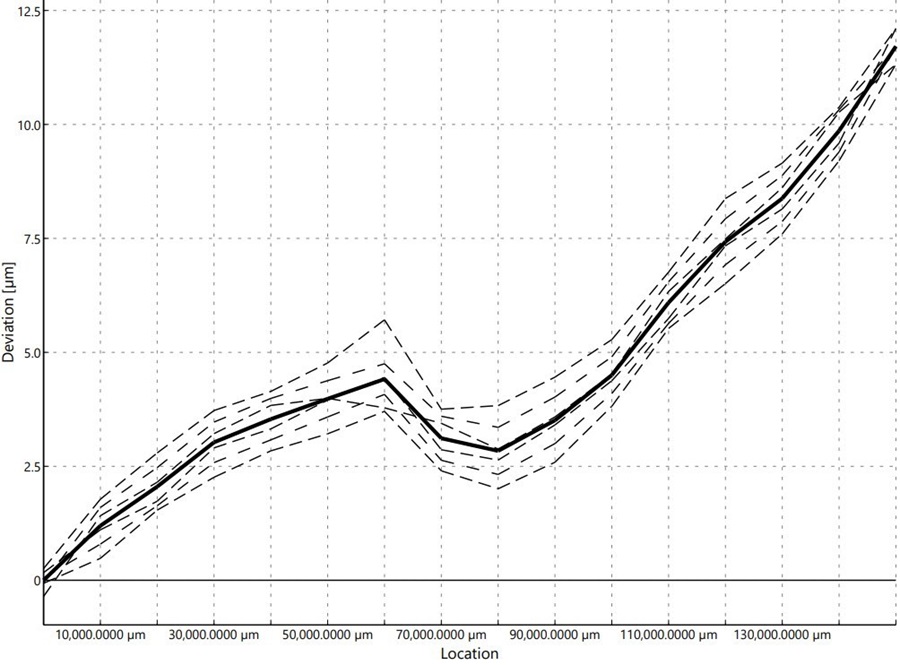
‧ 實驗1:使用移動平台內建光學尺閉迴路補償訊號,架設IDS3010輔助量測平台位移,可以得到以下幾個主要參數數據(單位:μm)及位置偏差圖。
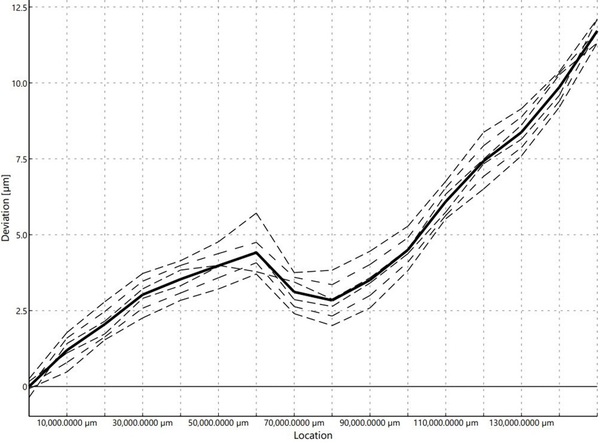
| 圖六 : 光學尺補償訊號量測之ISO230-2:2014位置偏移圖。 |
|
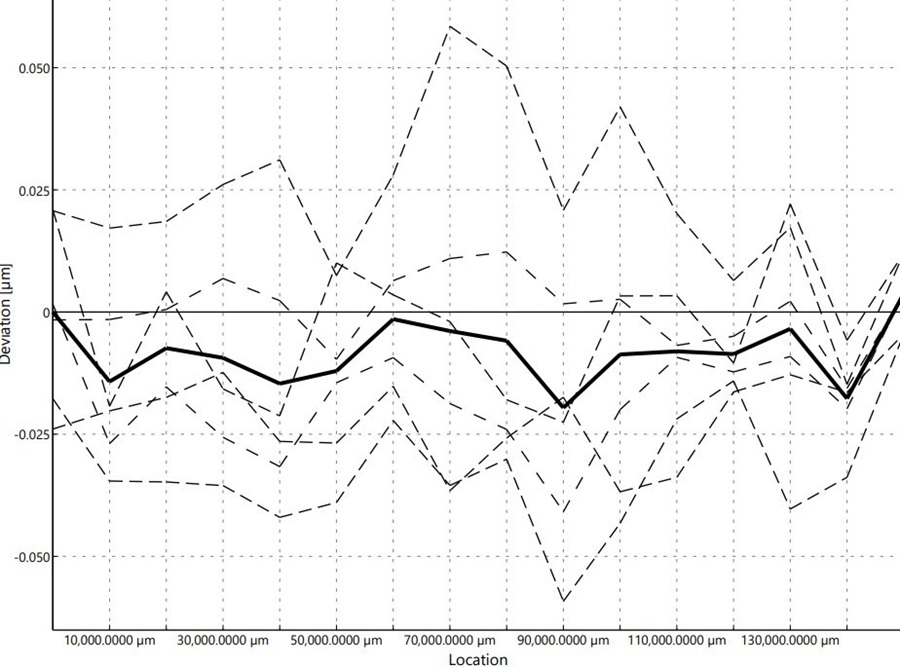
‧ 實驗2:關閉移動平台內建光學尺閉迴路補償訊號,使用IDS3010進行平台位移量測,同時由IDS3010的即時補償量測訊號來進行移動平台的位置補正,可量測到主要參數數據(單位:μm)及位置偏差圖。
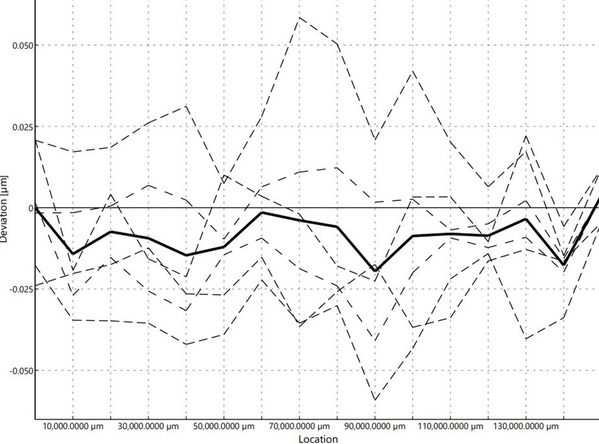
| 圖七 : IDS3010即時補償訊號量測之ISO230-2:2014位置偏移圖。 |
|
@表格;表一:實驗1與實驗2量測數據比較(單位:μm)
即時補償訊號來源
|
實驗1
平台內建光學尺
|
實驗2
IDS3010即時補償
|
Axis deviation
|
Bidirectional ↑↓
|
Reversal value B
|
1.0329
|
0.0426
|
Mean reversal value
|
-0.7806
|
0.0176
|
Range mean bidirectional positional deviation M
|
11.7130
|
0.0234
|
Systematic positional deviation E
|
11.7631
|
0.0532
|
Repeatability of positioning R
|
2.0086
|
0.0951
|
Accuracy A
|
12.4628
|
0.1177
|
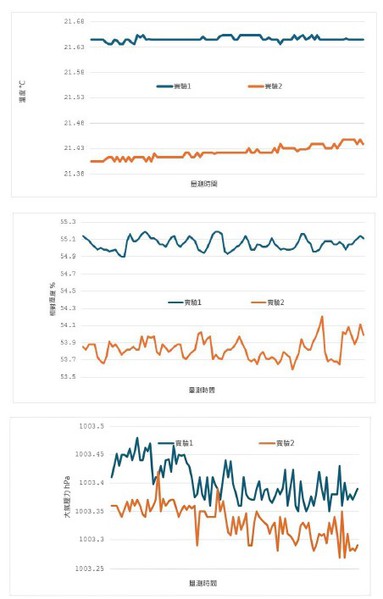
| 圖八 : 實驗1與實驗2量測時的環境溫度 °C 變化值(上)。相對溼度 % 變化值(中)、大氣壓力 hPa變化值(下)。 |
|
結論
根據這兩組實驗的對比結果,顯著顯示出使用 attocube 公司生產的 IDS3010 雷射干涉儀作為系統的即時補償訊號來源,搭配與均華精密工業技術開發合作線型馬達驅動控制方法來進行同步整合,能大幅提升移動平台的重複定位精度和精準度。
相較於移動平台內建的光學尺,IDS3010 可將重複定位精度從原本的 2.0086 μm提升至 0.0951 μm,而精準度則從 12.4628 μm 提升至 0.1177 μm,顯著減少了定位誤差,使平台設備能更精確地達到設定位置。
這樣的性能提升,對於極度要求精密操作的應用,尤其是半導體機台的精密定位至關重要。IDS3010 不僅能大幅提高系統的可靠性,還有助於提升產品生產的一致性,進而提升整體製造效率與產品品質。
未來展望及延伸應用
本次實驗採用IDS3010雷射干涉儀搭配單軸感測訊號進行量測。IDS3010主機具備同時量測三軸感測訊號的能力,基於Fabry-Perot干涉原理,使用者可根據自身設備需求,自由靈活地設置感測探頭的位置。相較於傳統的邁可森(Michelson)干涉儀系統,IDS3010不僅擺脫架設位置的限制,還顯著提升應用上的靈活性和即時補償精度,讓使用者在複雜環境下仍能維持高效的測量操作,在自由度上加大優化了實驗配置與結果的可靠性,未來可將此特色及優點運用在其他設備裝置使用。
半導體製程晶圓載台的移動及偏擺檢測
在半導體製程中,晶圓載台的精密位移量測至關重要。由於晶圓上的電路結構極其微小,載台的每一次微小位移都直接影響製程的精度和品質。精確的位移控制能確保各層電路的對準,減少誤差,提高生產良率,並確保製造出的晶片性能穩定可靠。如圖九所示,在一晶圓載台上分別於a、b、c三個位置裝設感測探頭,a位置探頭用來進行平台X軸方向之即時位置補償回饋,b與c位置探頭用來量測平台移動時所產生的Y方向移動量及利用b與c兩軸可以計算出平台移動時產生之旋轉偏擺量。
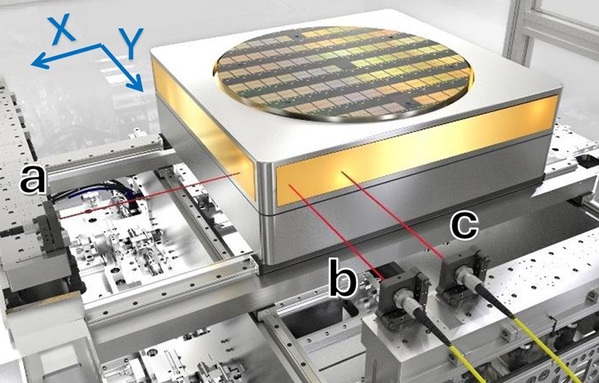
| 圖九 : 於晶圓載台a、b、c三個位置架設IDS3010干涉儀感測探頭。 |
|
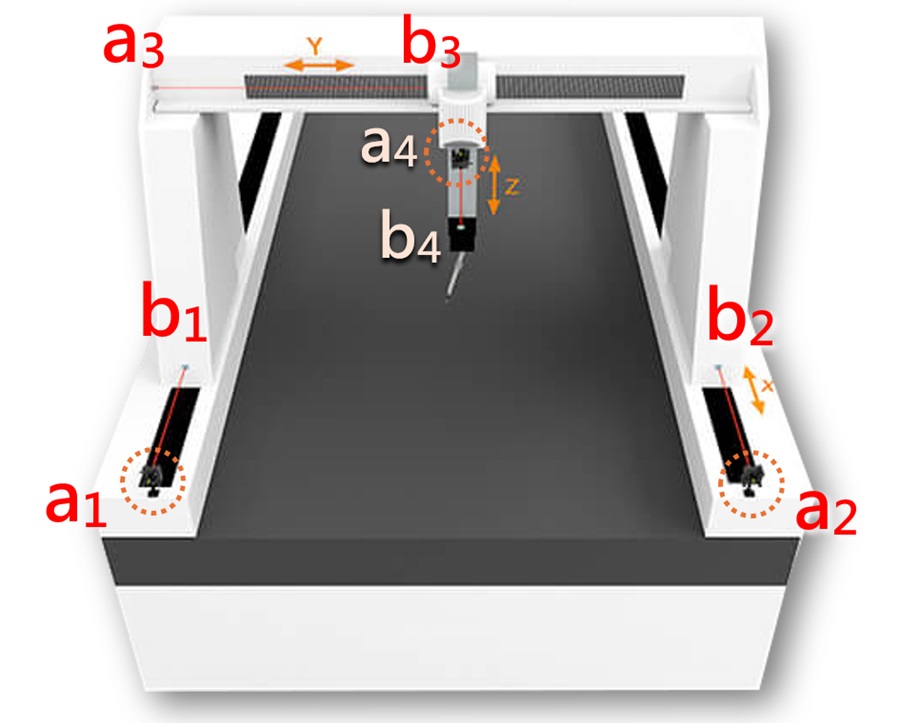
工具機機台系統移動檢測
在工具機系統中,每個移動軸都配備有驅動馬達,依據加工需求進行精密移動。特別是龍門系統,行架兩端需要在穩定且等速的條件下同步移動,其兩端之準確度更是需要特別重視。如圖17所示,透過兩台IDS3010干涉儀共搭配四個感測探頭及復歸反射器,可以分別量測行架兩端的移動是否完全一致,其中a1及a2為感測探頭裝設位置,b1及b2為復歸反射器,進行龍門行架於X軸移動之即時監測,更進一步在Y軸a3-b3及Z軸a4-b4上亦可同時裝設,確保三次元量測機台所有移動軸高精度的同步性。
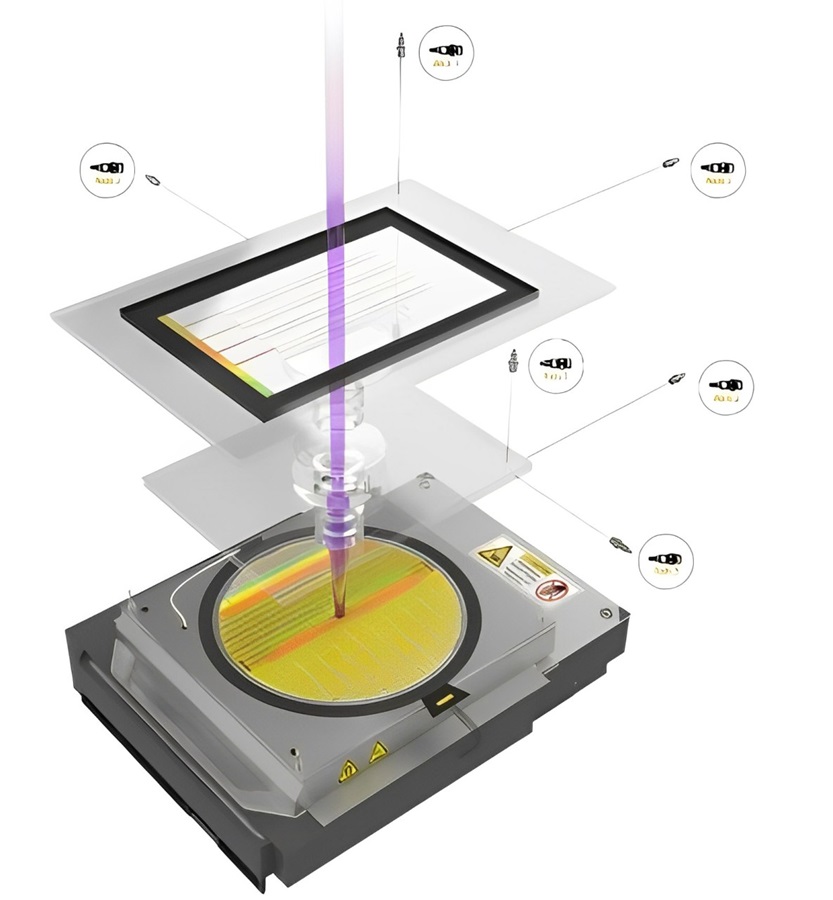
半導體曝光機或視覺檢測相關機台
在半導體製程的曝光階段,為了精確控制光罩與晶圓之間的相對位置並即時監控曝光過程,大多使用精密的疊層對準(overlay alignment)系統。這一系統可確保每層電路圖案的正確位置。在此過程中可使用多台IDS3010干涉儀串聯,增加測量的自由度,達到 3 倍於干涉儀數量的自由度增長。如圖18所示,使用兩台 IDS3010 干涉儀,則可配置 6 個感測探頭,實現對光罩與鏡頭位置的高精度測量與控制。
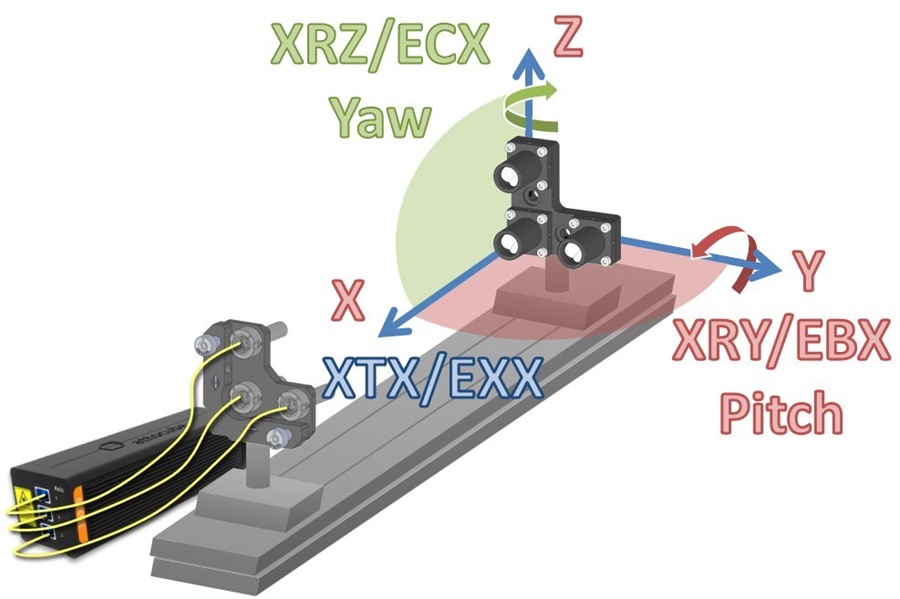
角度變化量測
IDS3010干涉儀除了量測目標物的直線位移量之外,可搭配專為角度量測所設計之L型三探頭L型製具及L型復歸反射器,可同時量測位移、俯仰(pitch)及偏擺(yaw)。
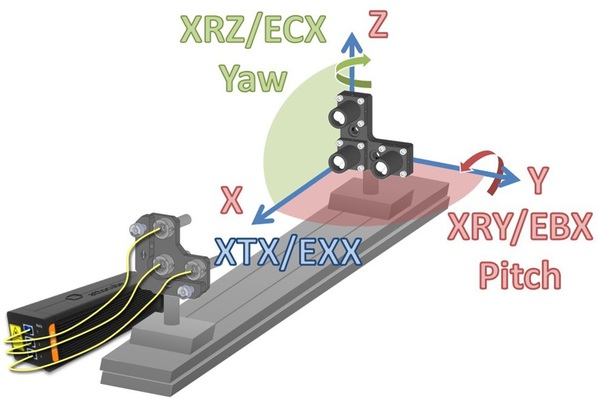
| 圖十二 : L型角度量測配件之移動誤差與旋轉誤差示意圖。 |
|
(本文作者林益呈為阜拓科技專案經理、曾奕凱為均華精密工業高級專員)
[註]阜拓科技與均華精密工業合作技術開發線型馬達驅動控制方法均已簽屬NDA內容保密條款。