科技的發展是為了優化生存品質,機器人產業的出現,漸漸地融入人類的生活之中,「機器人化」的智慧家電、機器人輔具、智慧之家等東西出現,造福家庭主婦、小孩、身障者、銀髮族等更多族群。演進至今日,機器人輔助醫療也已成為全球在健康發展領域的主要趨勢。根據國際商業觀察公司(Business Monitor International,BMI)的調查顯示,2013年全球主要72個國家的醫療支出高達7.3兆美元,該數字至2020年預測上攀至10.2兆美元,可見,降低醫療成本並提高醫療效率,將成為未來的核心醫療課題。
傳統的復健治療多半仰賴治療師、職能師、看護師或病患家屬進行一對一的陪伴。其高人力需求使得復健長期成為高成本的醫療項目,需要相當的社會成本與醫療資源的投入。而隨著全球老齡化所帶來的衝擊,老年人口比例與老年疾病逐年上升,醫療人力勢必將不敷使用。因此,智能感測技術搭配智慧化機器人復健醫療設備將有機會替代人力,滿足高齡化社會的復健需求。

| 圖一 : 機器人輔助醫療已成為全球在健康發展領域的主要趨勢(source:Government Technology) |
|
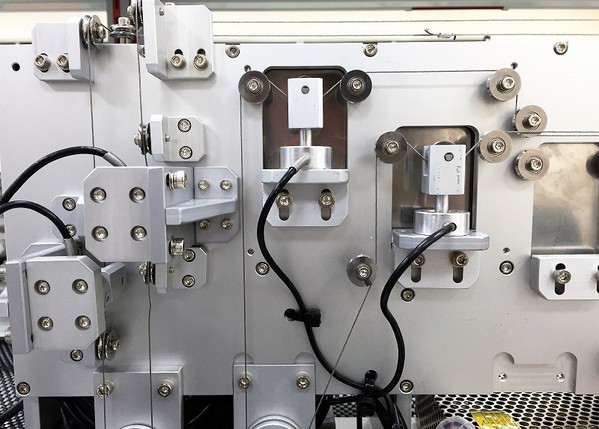
| 圖二 : 清華大學教授張禎元與其團隊自主研發之國產機器手復健結構 |
|
為了減輕復健治療的設備成本與人力需求所形成的負擔,清華大學動機系張禎元教授團隊及長庚醫院復健科副主任裴育晟教授團隊在科技部的補助之下,致力整合機電工程與臨床需求,擷取實際臨床案例與經驗,研發出複合式復健機器人平台,為創新的智慧型機械輔助復健平台,能夠建置一標準化的機械量測系統,針對患者使用後的恢復狀況、運動反應以及肌肉張力進行評估分析。以下詳述智慧型機械輔助復健平台的功能與成效。
復健機器人的類型
首先,針對復健機器人(Rehabilitation Robots)的類型說明,其主要的功能為藉由機械的重複性與可靠度,來協助患者的肢體完成精確且重複的往返動作。透過外部動力透過機械結構與人體互動,達到強化訓練患者的局部肢體能力,並協助或輔助患者完成各指定動作進行復健。
復健機器人大致可區分為兩類:一、誘導型人機互動復健機器人平台﹔二、驅動式復健機器人平台,其相關技術內容敘述如下:
誘導型人機互動復健機器人平台
誘導型人機互動復健機器人平台為一種主動式復健型態,是採取一個互動式軟體介面或是以虛擬實境的方式,來誘發使用者自願進行局部的復健,進而達到復健的效果。藉由軟體與患者間的互動,將可以提高復健過程的樂趣,進而提升患者的復健意願;此外,多元化的軟體遊戲設計可提供多種的復健種類與療程,除傳統輔具復健外,此選擇在未來將可以增加復健的多樣性與選擇性。
以手指復健平台為例,該機器人復健設備的設計上具備有感測裝置,此等感測裝置可偵測在復建過程中,輔助評估使用者在遊戲任務達成率或肢體復健的軌跡等。目前在市場上以美國Flint公司的MusicGlove與瑞士Yourehab公司的yougrabber以及Neofect等產品皆屬於這一類產品,而台灣富伯生醫(RMTC)的DexHand則更進一步可以於機器平台上直接感測到每個手指於復健時各個關節鬆緊程度所產生的變化,以利醫師即時評估治療效果和進行客製化的復健醫療。
驅動式復健機器人平台

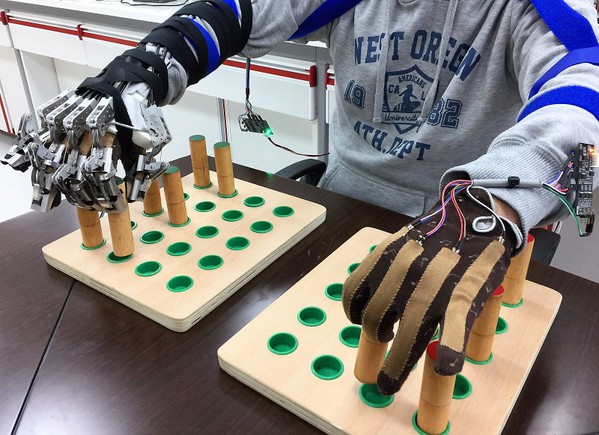
| 圖三 : 富伯生醫研發出的線傳式機器人復健手平台可協助病患做手部開和抓握復健。(source:富伯生醫) |
|
驅動式復健機器人平台則是透過外部致動器的力量輸出,經過機械結構傳遞後,將此力量傳遞至使用者的局部肢體上,來加強病患肢體的輸出力道或是牽引病患復健的肢體進行正確的運動姿態,並到達理想的空間位置。因此,如何有效利用外部動力來驅動是此平台的重點。
外部動力的驅動方式
至於外部動力的驅動具有被動與主動等兩種機制:
一、被動式(Passive)驅動:
被動式驅動是使用機器裝置帶動使用者的肢體做連續往返運動(Continue Passive Motion, CPM),動力的輸出與機械裝置的運動模式是由控制系統所決定,這類的驅動機制可以達到維持功能受損的肢體活動的功能,如Tyromotion公司所研發的手指復健運動儀Amadeo。
二、主動式(Active)驅動:
主動式驅動與被動式不同處在於機械動力是以一個使用者所送出的先導訊號作為啟動信號讓復健機器人產生動作,這樣的機制可以結合患者的運動意志,提高肢體復健效果。先導驅動訊號的產生有以下幾種方式:
a.肌肉電位
肌肉電位(Electromyography, EMG)技術係使用電極貼片貼附在皮膚表面,擷取當肢體運動時期肌肉收縮所產生的肌肉電位訊號,藉此可為復建裝置提供一個驅動訊號,構成一種主動式控制的復健效果,亦即當系統感受到患者要產生動作時,機械會輸出動力來帶動因為患者肢體力量不足而無法運動的部位。此主動式控制機制可使肌力不足的患者經由自主意圖,透過微弱的肌肉運作來驅動外部機械動力以輔助完成復健運動。
b. 腦波訊號
腦波訊號(Electroencephalography, EEG)與EMG訊號不同,以腦波驅動裝置係利用感測器貼附在頭顱表面,藉由腦波訊號與相對應運動間的相關模式訊號,即運動意志,驅動輔助機器人作動以達成運動要求。然而由於腦波訊號趨於複雜,迄今該方式僅能使機器人復健裝置進行簡單的動作;近幾年在世界知名期刊《自然》(Nature)與《科學》(Science)上出現利用大腦神經元訊號來控制機械手臂的研究,研究者將高密度的神經探針(Neuroprobe)植入靈長類或癱瘓的病患之大腦運動區皮質(Motor Cortex)內,藉由研究肢體動作與腦波或神經元訊號間的關係,找對相對應的反應模式建立控制模型系統,之後腦訊號透過濾波與放大後輸入控制系統轉換成機械手臂控制訊號來控制機器裝置完成運動。雖然有相關的文獻發表,但於複雜手掌指的復健,待需進一步的研究與產品化。
c. 陀螺儀、加速規等感測器
當感測器放置於輔具機台內,患者可以透過細部的姿勢變換來驅動機器人作動輔助患者完成肢體運動,例如以色列Rewalk公司和紐西蘭REX Bionics公司所開發的下肢復健輔具、工研院機械所開發的下肢行動輔助機器人等皆屬於這類技術的下肢復健產品。而於手掌指復健方面,台灣富伯生醫(RMTC)的手掌指復健機器人系統裡則利用此技術來即時監控了解使用者在空間中的肢體姿態及相對位置。
d. 可撓式角度感測器
將感測器放置於可穿戴式載具上,如手套。利用感測器偵測手指運動過程中的各種角度變化,將感測到的資訊轉換成機械控制指令驅動機械手臂達成與穿戴者相同的動作。如義大利Gloreha公司與富伯生醫所研發的復健手套中即有此概念的應用。
復健平台協助自主生活
近年來,已有一些產品化的復健機器人於市場上活躍,例如瑞典的Bioservo公司研發出一款可以協助老人日常生活抓握的輔助手套,透過外部動力來加強老年人口的握力表現,協助完成一些日常生活的簡單動作,如拿杯子、開門、提重物等,幫助病患於日常生活中可以獨立自主生活。
至於大型復健醫學中心裡常使用的復健機器人平台則相當豐富。以香港Rehab-Robotics所研發的Hand of Hope為例,透過機械結構的設計與配合,來協助病患的肢體部位進行被動式牽引復健,這一類的復健器材多屬於驅動式復健機器人平台的代表,透過外部動力來支配使用者肢體完成復健動作,此類復健儀器常見應用於肢體功能較為僵硬甚至失能的病患。
主動式機械人復健平台多屬於無動力輸出或是輔助動力輸出的復健機器人平台,亦即這類型的機器人多半是協助病患去完成指定的復健動作,並非支配病患的肢體動作,讓病患自主的活動自身肢體去復健,而不足的部分才由外部機器人補足,義大利Gloreha公司所開發的復健手套即為此類機器人復健平台的代表之一。
相較於傳統的復健治療配置,以上敘述的機器人復健平台能夠透過數據進行評估,亦期望導入機器人輔助復健後期能實質的大幅降低醫療人力上的負擔。
導入感測技術更精準
因感測科技技術的快速發展與應用導入,為近期的復健機器人平台開始出現一些創新應用,例如由高密度的薄型感測器構成的機械皮膚所包覆之機器人裝置,將可提供患者在使用上的安全資訊,如碰撞風險、機台表面與人體皮膚的過度摩擦與壓迫等;或是將超微小型的慣性(IMU)感測元件內嵌至復健機器人平台,可即時監控使用者在復健時的肢體動作姿態、角度、運動速度與軌跡等資訊,將使用者在復健過程的身體反應數位化紀錄,相較於傳統的肢體姿態感測模組,如三維影像辨識系統、關節角度編碼器等,由張禎元教授實驗室所研發出來的感測器新元件不僅縮小了安裝體積,同時更保有傳統感測器模組的量測精度。透過上述智慧型回饋機制的導入,並結合閉迴路控制設計,將可達到自動化長期復健追蹤與評估復健效果的機制。
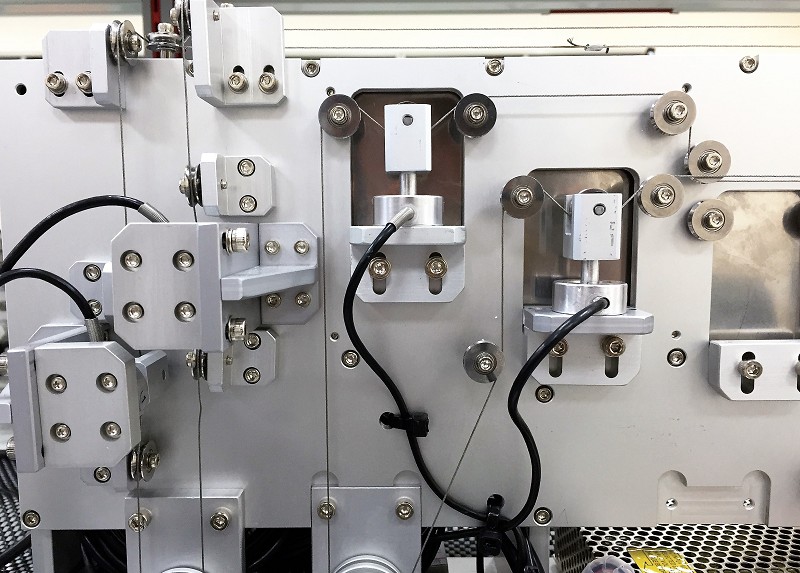
| 圖四 : 富伯線傳式復健機器人平台的線張力感測技術與元件(source:富伯生醫) |
|
富伯生醫科技首創牽引式復健機器人,獨特的機器人外骨骼設計不只在動作上滿足了復健需求,獨特的三段手指關節對心結構更可以有效協助手指上的各個關節進行復建。此外,特殊的機械結構設計也讓此復建機械人平台能在使用一個致動器的前提下,有效的個別驅動單一手指的兩個關節自由度,最後透過結構上的設計,並將機器人本體與致動力源分開,中間透過線的連接來牽引使用者執行復健,此設計不僅能降低病患在穿戴時的重量負擔外,更能有效降低外部致動器的數量以降低整個系統的重量與體積,也為病患在執行復建過程時提供更高的自由性與可活動性。此外,富伯更將此平台與拉力感測技術結合,線上即時偵測牽引動力線的張力變化,為使用安全把關;同時也可即時偵測肌肉張力變化,為使用患者、治療師或醫師提供治療報告。
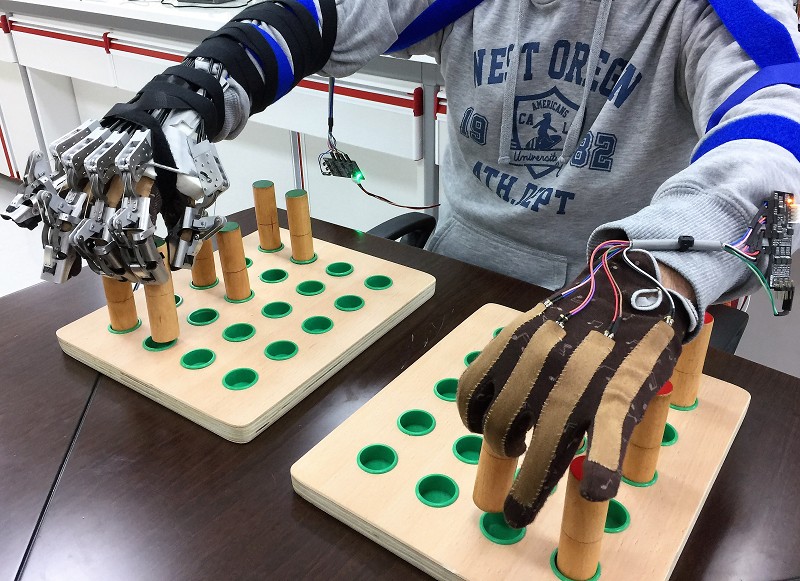
| 圖五 : 富伯的線傳式鏡像治療機械人平台參與實物復健治療的應用(source:富伯生醫) |
|
大標:雲端時代扭轉復健思維

| 圖六 : 富伯生醫科技執行長黃建嘉認為互聯網與雲計算的未來進展,將扭轉傳統的復健思維。 |
|
智慧照護與遠距醫療是另一個生醫科技的發展重點,富伯生醫科技執行長黃建嘉博士表示:「隨著互聯網與雲計算的時代來臨,將扭轉傳統的復健思維。我們希望讓復健機器人不只能帶動患者運動,我們更希望機器人平台未來可以結合互聯網、雲計算與高端感測技術,多方導入復健醫療來幫助病患,將復健醫療推得更廣。」
網際網路的普及提升了醫療下鄉的可能性,讓偏遠區域的患者也能受惠。以鏡像教導式外骨骼復健機械手臂平台為例,手指位置角度感測技術的導入,患者可使用健康手教導失能手做出適當手型完成功能性運動。

| 圖七 : 隨著互聯網與雲計算的時代來臨,將扭轉傳統的復健思維。(source:http://www.braceworks.ca) |
|
當此技術結合網路平台,醫護人員能在醫院端與居家端需要復健的患者面對面互動,利用感測器手套將治療師會醫師的運動手型指令傳送至居家端復健患者所穿戴的外骨骼復健手機器手系統中,機器手即可根據醫護人員的運動模式帶領患者進行所需要進行運動,進而訂定一個復健療程療程,建立一個數位醫療服務架構。此雲端遠距復健醫療具有與國內大政策「長照10年計畫2.0」、國際醫療下鄉、遠距醫療接軌的潛力。
智慧化機器人輔助醫療系統的導入,透過建構一個優質、平價且普及的長照服務體系,推廣至一般社區及鄉村,將原本傳統尖端醫療在城市中心的概念擴展並扎根於地方,期望真正落實減輕居家照顧的重擔,並且解決大型醫療機構醫療資源分配不足的狀況。藉由遠距醫療機制亦能關懷到世界各地需要醫療協助的人們,實現「連接在地、連接國際、連接未來」的目標。
(本文作者張禎元為國立清華大學動力機械工程學系暨研究所教授,黃建嘉為富伯生醫科技執行長)
**刊頭圖片來源(source:www.digitaltrends.com)