摘要
本文使用盛群微控制器HT66F70A為控制核心,設計一款能夠自動調節避震器之智慧裝置。透過應變規與加速度計感測路面之震動訊號,利用盛群微控制器判斷目前的行駛路況如:平穩或顛頗,並輸出適當的脈波調變訊號控制伺服馬達調整避震器之阻尼係數以符合當下路況。此外加速度計可於騎乘者緊急煞車時感測加速度訊號執行預先判斷,在避震器觸底前會將阻尼調整至較硬,避免打滑翻車,提高騎乘的安全性。同時加速度計也可感測自行車騰空時,阻尼會自動調整至最軟,使自行車在落地時能有效減震。本文具有多段模式調整,即時偵測路況避震器與騎乘情境自動化調整相對應之避震模式調整。除了能夠提升騎乘的舒適感外,同時也能有效的提高騎乘安全性。
1. 前言
避震器的存在是為了緩衝路面的不平所造成的震動[1]-[4],在行駛不同的路面時能夠保持車輪與路面的接觸。一般登山越野自行車如果要調整避震器的軟硬,都需要下車手動調整,並且在調整後不一定能夠達到理想的避震軟硬,無法帶來最佳的騎乘舒適度。一般而言在平穩路面區段,將阻尼調整至最硬可以讓騎乘者施力力道最有效傳達至車輪。在顛頗路面則需要將阻尼調軟,避免過大震動導致騎乘不舒適,甚至遇到較大坑洞時能避免摔車危險。本團隊設計出能夠不需下車手動調整,就能夠隨著不同的路面類型來自動調整避震器的系統。裝上本文後,騎乘者不需要煩惱不同路面所造成的不適感,只需要專心享受騎乘自行車的樂趣,達到最佳的騎乘舒適度,
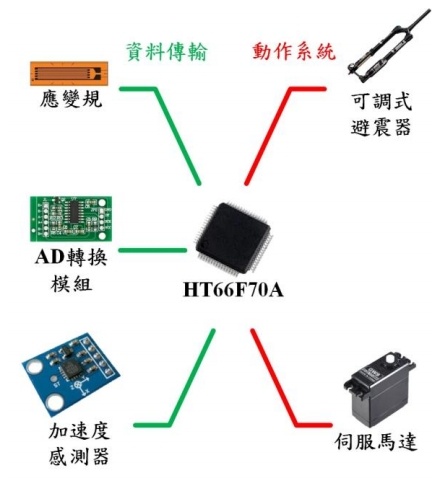
本文含有微控制器、應變規、AD轉換模組、三軸加速度感測器以及伺服馬達五項主要元件。當騎乘者騎乘在顛簸路面時,透過應變規偵測車身震動,經由AD轉換模組將之數據濾波縮減後送至微控制器分析路面類型,再判斷是否需要調節避震器,若需要調節,則透過微控制器控制伺服馬達,再由伺服馬達轉動阻尼旋鈕。煞車時為了不讓避震器干擾煞車最好的狀態,在煞車時馬達會把避震器阻尼調製最硬讓煞車不被影響。如有特殊情況,例如:自行車處於騰空狀態時將避震器阻尼調至最軟,來達到著地時最有效的減震。
2. 工作原理
本文結合多項創新軟硬體功能以盛群HT66F70A晶片為主控制器,配合應變規、加速度感測器之自動調節避震器,其系統架構圖如下圖1所示,各項說明如下:
2.1系統流程圖
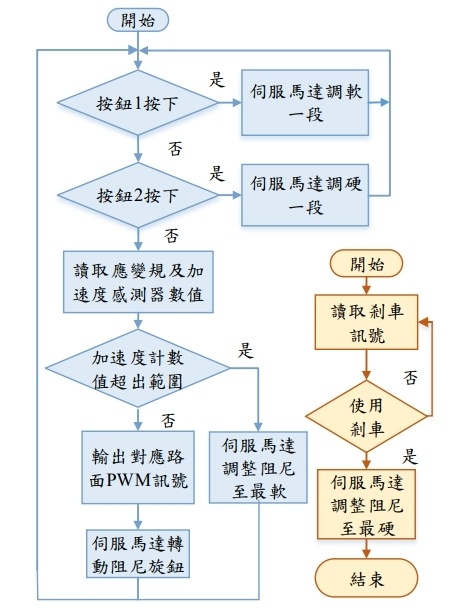
下圖為本文之系統流程圖。裝上本文騎乘時,應變規將感測路面的震動,經過AD轉換訊號之數據濾波縮減後送至微控制器分析路面類型,再判斷是否需要調節避震器。若需要調節,則透過微控制器運算控制伺服馬達,再由伺服馬達轉動阻尼旋鈕,自動調整至最適合路面與騎乘狀態的模式。
2.2偵測路面
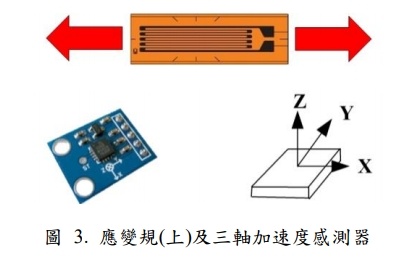
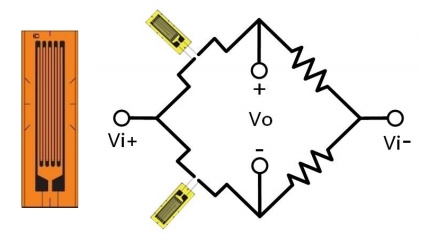
本文利用應變規電阻的拉伸或形變電阻值會改變的特性,透過惠斯登電橋量測其電壓差,並進行放大運算與A/D轉換,進而偵測前叉避震器的受力情形,以判斷目前路面的狀況。三軸加速度感測器的X軸數值可以偵測自行車緊急煞車時可能的前進速度,藉以控制阻尼避免避震器行程用盡導致危險。Z軸加速度值則可與應變規數值合併應用於判斷車體是否屬於騰空狀態。
2.3自動判斷路面
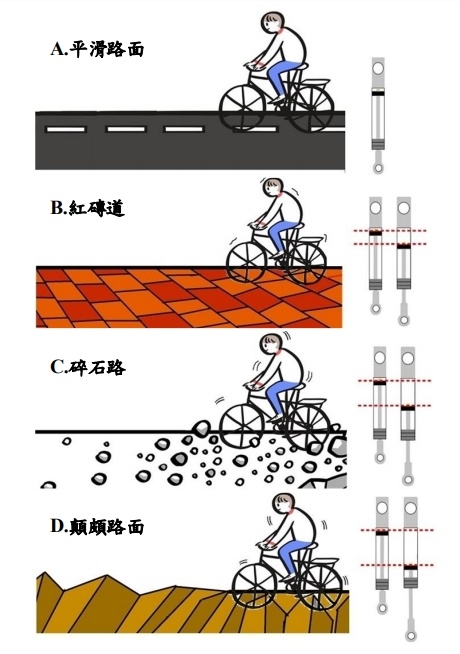
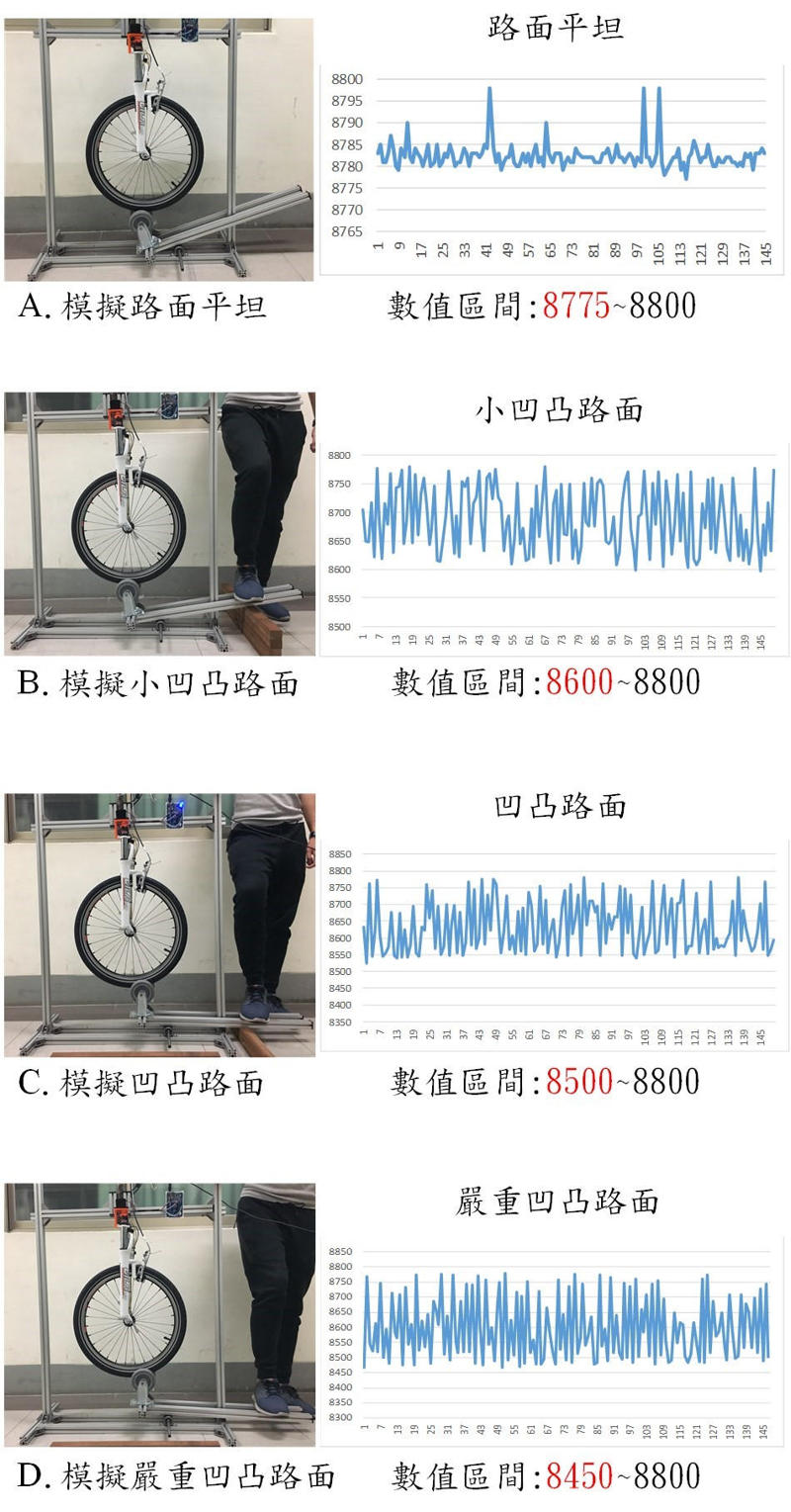
將採集之感測數值使用數位濾波器縮減後,用以調節避震器阻尼。如下圖,可看出不同路段避震器須調整震動幅度不同。
2.4自動調整阻尼旋鈕與手動按鈕控制
分析路面後由微控制器判斷是否需要調節避震器,若需要調節,則透過微控制器控制伺服馬達,再由伺服馬達轉動阻尼旋鈕,自動調整至最舒適的模式。
本文可使用按鈕進行手動控制,讓騎乘者可在騎乘中進行微調,達到自己最好的狀況。
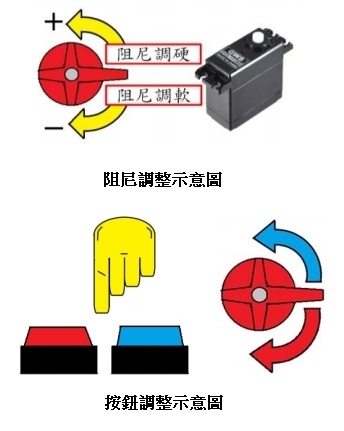
| 圖5 : (上圖)阻尼調整示意圖;(下圖) 按鈕調整示意圖 |
|
2.5緊急煞車避震器行程控制
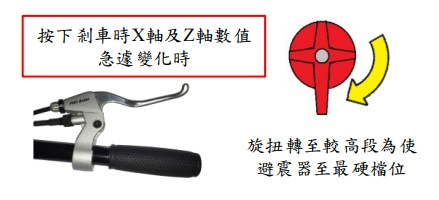
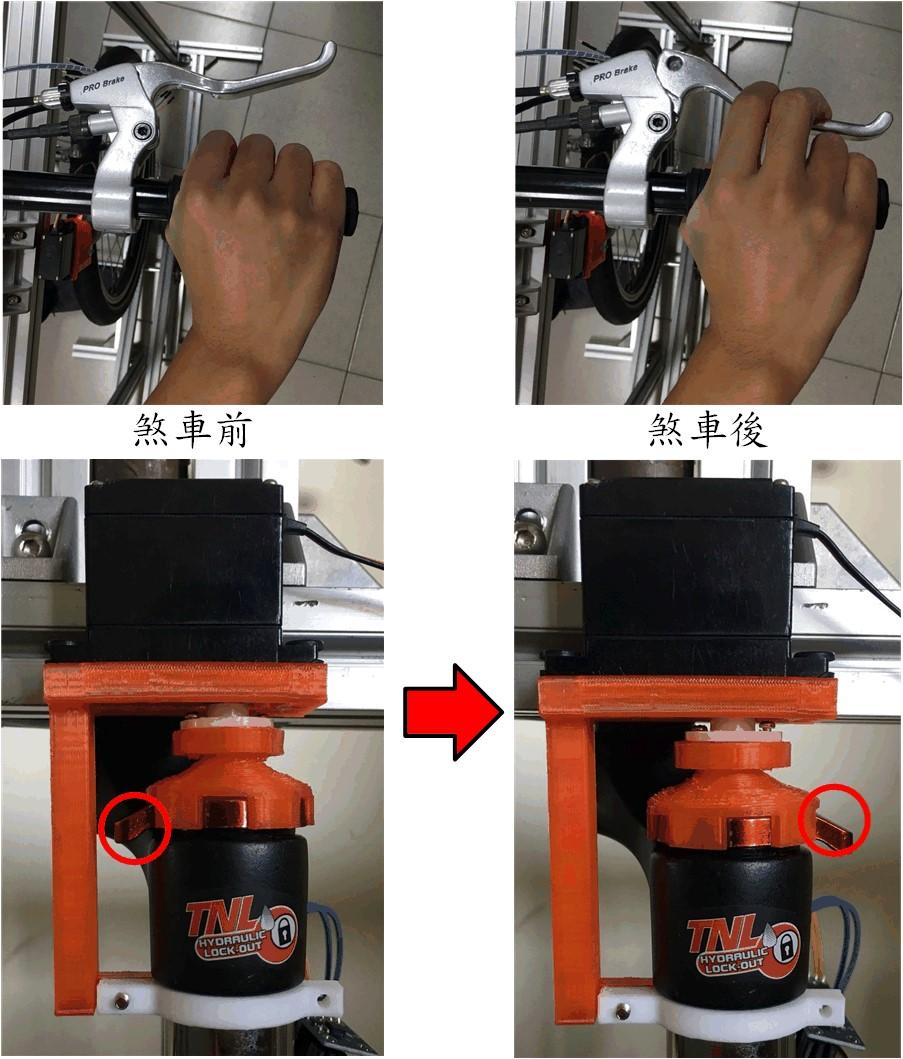
按下煞車時如果三軸加速度感測器的X軸及應變規的感測數值會急遽變化。此時微控制器經過運算後會輸出PWM訊號使伺服馬達調整阻尼旋鈕調整至較硬區域,預防避震器觸底,提高騎乘者的安全。
2.6車體懸空狀態偵測與調整
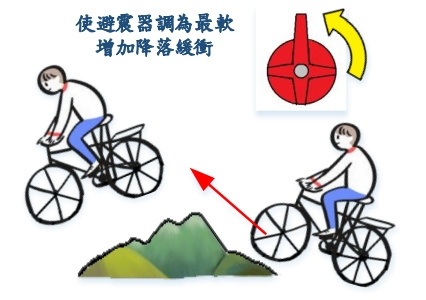
利用三軸加速度感測器的Z軸產生急劇變化及應變規感測壓力來判斷自行車是否在路面上,當判斷為懸空狀態時,阻尼旋鈕調至最軟達到最佳的減震效果。
3.作品結構
3.1盛群主控制器
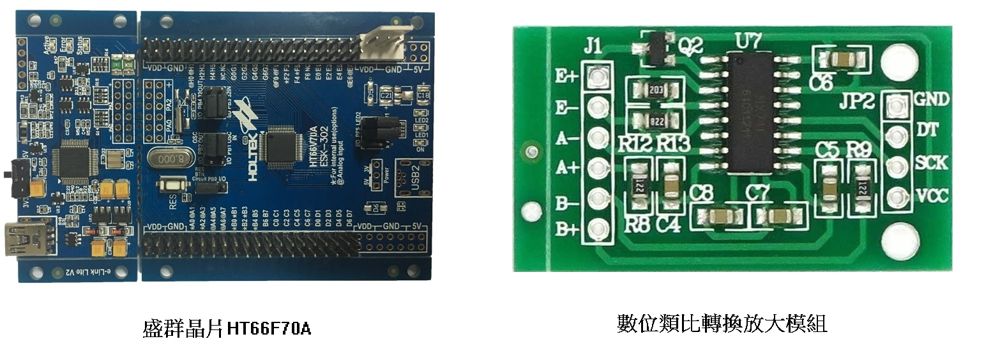
盛群晶片HT66F70A:透過應變規量測數值,經過AD轉換後,將數值傳送至微控制器分析出路面的類型後,輸出最適合的PWM訊號至伺服馬達,再由伺服馬達轉動阻尼旋鈕。
| 圖8 : (左圖)盛群晶片HT66F70A;(右圖) 數位類比轉換放大模組 |
|
3.2數位類比A/D轉換放大模組
數位類比轉換放大模組用於轉換類比訊號並放大為數位訊號輸出,型號為HX711。此模組為一款專為高精度稱重感測器而設計的24位A/D 轉換器晶片。因為電橋輸出電壓值極小,因此本文使用該晶片的通道A輸入電橋的輸出電壓,並利用該晶片內建之振盪器產生27個時脈將電壓的增益設定為64,即可得到放大電壓。再利用晶片進行A/D轉換,將訊號輸出至微控制器進行後續的運算分析。
3.3應變規與惠斯登電橋
應變規裝置用於量測路面變化,型號為KFGS-5-120-C1-11。利用惠斯登電橋之不平衡的原理,造成一微電壓之輸出,再利用放大器將訊號處理成我們所需要之電壓,去做量測,監控,以及回授控制。
3.4三軸加速度感測器
三軸加速度感測器用於偵測自行車是否為騰空狀態,我們使用的ADXL335是一款帶有信號調理電路的高精度模擬三軸加速度感測器。提供經過信號處理的電壓輸出,該產品的滿量程加速度測量範圍為 ±3 g(最小值),可以測量傾斜檢測應用中的靜態重力加速度,以及運動、衝擊或振動導致的動態加速度。

| 圖10 : (上圖)三軸加速度計;(下圖)控制避震器阻尼之伺服馬達 |
|
3.5伺服馬達
伺服馬達裝置用於自動轉動阻尼旋鈕機構,型號為GWS S125 1T 2BB。經過AD轉換後,將數值傳送至微控制器分析出路面的類型後,輸出最適合的PWM訊號至伺服馬達,再由伺服馬達轉動阻尼旋鈕,使阻尼達到最合適的軟硬度。
4. 測試方法
4.1作品構造
本文可使用在自行車可調式前叉避震器上,主要由應變規、AD轉換模組構成的電路,加上自行設計的伺服機構造達到在任何可調式前叉避震器都能夠輕易的裝置,圖11。
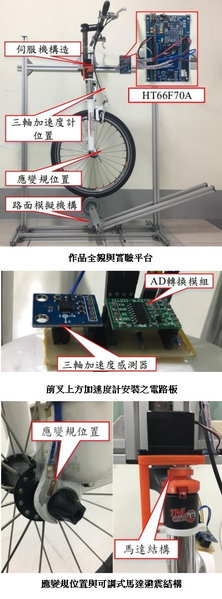
| 圖11 : (上)作品全貌與實驗平台;(中)前叉上方加速度計安裝之電路板;(下) 應變規位置與可調式馬達避震結構 |
|
4.2分析數值
本實驗以模擬不同路面,輪胎所受到的力道。路面平坦時,輪胎受到力道較小。路面顛頗時,輪胎受力大。
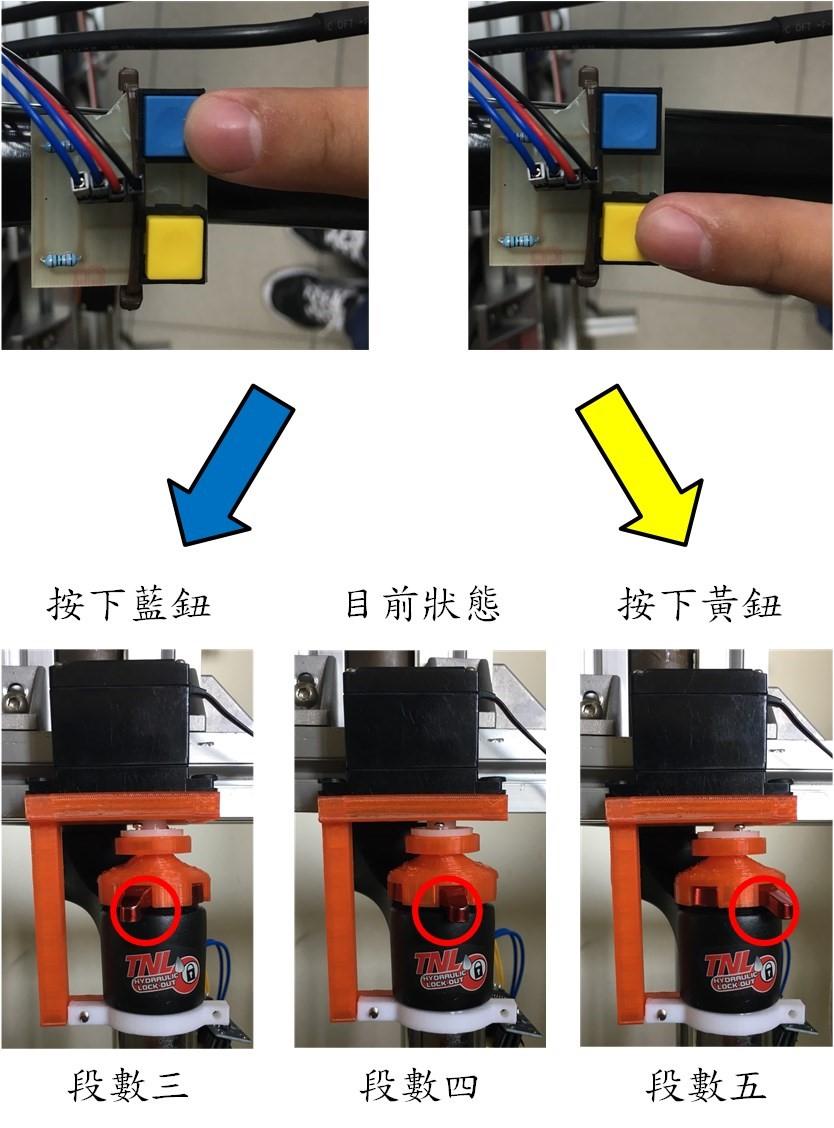
4.3手動按鈕調整
本文還有設計按鈕以便用於騎乘者可以選擇自己最舒適的狀況。按下按鈕就能夠自動調整到騎乘者想要的避震模式。
4.4緊急煞車避震器行程控制實驗
按下煞車時,行進中的人體與車子具有向前的慣性,再加上重力加速度向下壓,如果避震太軟而觸底可能造成翻車的危險,為了使騎乘者更安全,按下煞車時如果三軸加速度感測器的X軸及Z軸數值急遽變化,微控制器會輸出PWM訊號使伺服馬達調整阻尼旋鈕至最硬,預防避震器觸底,提高騎乘者的安全。
4.5車體懸空狀態實驗
此功能為騎乘者處於懸空狀態。當應變規偵測不到壓力且三軸加速度感測器感測到Z軸超出設定範圍,將避震器阻尼調至最軟,來達到著地時最有效的減震,如下圖所示。
5. 參考文獻
[1] 避震系統 - 自行腳踏車機構介紹,http://pel.me.ntu.edu.tw/ntume_am/application/bike/8.%E9%81%BF%E9%9C%87%E7%B3%BB%E7%B5%B1/UntitledFrameset-8.htm
[2] 煞車對避震車架之影響–單車狂熱Bike Mania,http://www.bike-mania.net/。
[3] 應變規 (Strain Gauge) 概述:量測原理、應用與不同種類詳解,http://www.ni.com/white-paper/3642/zht/
[4] 加速度計和陀螺儀感測器:原理、檢測與應用 - 電子工程專輯,http://archive.eettai
wan.com/www.eettaiwan.com/
(本文作者為樹德科技大學電腦與通訊系陳智勇教授、吳昀澤、吳科毅、李岳勳、夏瑞毅)