NVIDIA (辉达)今(10)日宣布推出 DRIVE Software 8.0 版,其将增强的感知、视觉化与地图规划等功能全部整合到新版软体中,让安全自动驾驶车辆能轻易了解前方路况。
 |
| NVIDIA 於 CES 宣布推出 DRIVE Software 8.0 版,其将增强的感知、视觉化与地图规划等功能全部整合到新版软体中。 |
本周於 CES 发表的最新版 DRIVE Software 软体导入以 AI 驱动的先进自动驾驶与各种座舱使用者体验功能。DRIVE Software 8.0 众多功能也是近期推出的 DRIVE AutoPilot 系统的特色。新版软体将於未来几周内释出给开发人员使用。
NVIDIA DRIVE Software 是一款开放软体套件,背後由 DRIVE AGX 平台的运算效能支持。其包含 DRIVE OS 作业系统、DriveWorks 软体框架、支援开发自驾程式的软体开发套件 (SDK)、DRIVE AV 与DRIVE IX 自驾软体。
DRIVE Software 8.0 特色
透过此版程式,开发者现在能取得运用在车载感测器、驾驶员监控与更先进的环境感知功能等应用的高解析视觉化技术。
车载视觉化功能为驾驶提供自驾车大脑的即时视觉能力。其能显示车子「看」到的情境、如何辨识物体与规划後续行驶路线以及决定如何每秒随时变动。此外,透过 扩增实境 (AR) 技术,自驾车软体开发人员能进行视觉化,并以其容易了解的格式来追踪这些资料。
新版软体也加入软体感知功能的更新并改进物体侦测能力,同时也提供车辆 360 度环景影像,让 DRIVE Software 8.0 成为极先进的开放软体平台,协助推动自动驾驶的研发。
追踪路况与驾驶
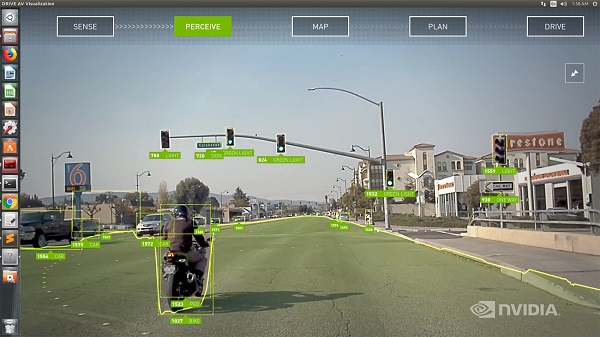
透过将感测器资料转化为视觉影像,DRIVE IX 让制造商能追踪自驾车的各种输入资料与感测资讯,并透过叁照即时撷取与先前储存的资料进行路径规划。开发者能利用车内的显示器读取车辆行驶的资料。视觉化共分成五个阶段运行,包含感测、感知、地图、规划与驾驶。
在感知阶段,显示器会呈现未经处理的摄影机感测器资料,自驾车会利用其进行物体侦测,接着透过标定物体位置的定界框进行车辆的物体侦测程序,并针对最远距离 50 公尺外的物体加上标签。此阶段还会显示地图阶段,显示画面中会标记自驾车感知到的车道线,之後再由规划阶段显示车辆即将行进的路线。最後,驾驶阶段则会绘制自驾车驾驶方向、加速与煞车等动作,呈现车辆准备要行进的路线。开发者能在车辆行驶时即时切换这五种检视图。
驾驶的监控也分成类似的阶段。利用面向驾驶的摄影机,深度神经网路能追踪驾驶人是否昏沉或分心。透过更新的视觉化功能,驾驶与乘客能即时看到这个分析过程。
在驾驶视觉化方面,驾驶监控功能会显示初期感测阶段未经处理的摄影机资料,然後在侦测阶段加入脸部与眼睛辨识。在追踪阶段,视觉化功能会显示驾驶人头部的角度与视线的方向。再分析驾驶人是否昏沉,若有就会显示咖啡杯图标,若是分心则会在旁边显示已偏离道路的计时器。在这两个阶段,当演算法侦测到这些危险情况时画面就会调成红色调。
增强感知与地图绘制
除了先进的视觉化技术,DRIVE Software 8.0 还承袭 DRIVE AV 的感知与其他功能,并藉由新增的深度神经网路打造自主程度更高的驾驶学习经验。
其中一种 LightNet 网路能辨识主车灯与方向灯,并能分别绿色、黄色或红色等灯色。相较之下,SignNet 网路则能辨识各种交通号志,包括速限、单行道、禁止通行与停车再行等。
在新版程式中,DRIVE AV 也导入 DRIVE MapStream,让开发人员将车载感测器的资料上传到自己的数位地图。这些地图至关重要,让自驾车能确定自己处在道路上的位置,以及预判前方像是施工或道路封闭等障碍状况。
为协助业界更快让具备安全性的自驾技术上路,DRIVE Software 8.0 将於 1 月中旬释出给开发人员,让各家制造商往量产自驾车的目标迈进一步。