麻省理工學院(MIT)與史丹佛大學的工程師團隊合作開發出一種新型機器夾爪。這款機器人能像藤蔓般蜿蜒生長並纏繞物體,不僅能抓取花瓶、西瓜等易碎或不規則物品,其大型版本更能將臥床病患安全地從床上抬起,為長照護理與工業搬運提供了一種比傳統夾爪更溫柔的解決方案。該研究成果已於今日發表在《Science Advances》期刊上。
 |
| /news/2025/12/14/0952133940S.jpg |
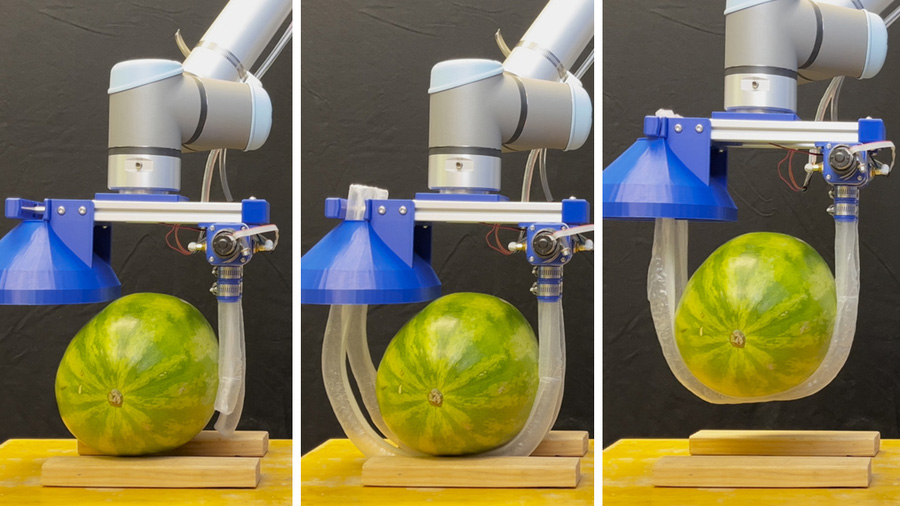
這款新型機器人的核心結構包含一個加壓箱體,運作時會從中充氣延伸出長條狀、類似藤蔓的管狀物,其過程如同襪子翻面般向外生長。隨著管道延伸,這些「藤蔓」會扭曲並盤繞在目標物體周圍,隨後繼續生長繞回箱體,並被自動夾緊固定。接著,機械裝置會將其捲回,形成一個柔軟的吊索結構,將物體輕輕抬起。
研究團隊指出,史丹佛大學過去在軟體藤蔓機器人領域已有開創性發展,這類機器人利用氣壓控制,能像植物般從尖端生長,穿越狹窄或雜亂的空間。然而,過去的設計多屬「開環」系統,無法自行固定形成迴圈。此次MIT與史丹佛的合作突破了這項限制,新設計結合了開環與閉環的優勢:先以開環形式穿過障礙物(例如鑽入躺在床上的人體下方),再回到起點形成閉環,創造出穩固的懸吊結構。
在實際演示中,研究人員展示了大型機器人系統如何將模擬病患從床上平穩抬起。MIT機械工程系博士候選人Kentaro Barhydt表示,將病患移出病床是照護者體力負荷最重的工作之一,這類機器人不僅能減輕照護者負擔,也能讓病患感到更舒適。史丹佛大學工程學教授Allison Okamura則補充,相較於人形機器人,這類軟體機器人更安全、成本更低,且能針對特定人類需求進行優化設計。
除了醫療照護,該技術展現了極高的通用性。團隊開發的小型版本可安裝於商業機器手臂上,成功抓取並抬起西瓜、玻璃花瓶、壺鈴等重物或易碎品,甚至能從雜亂的箱子中精準抓取目標。研究團隊正計畫將此技術推廣至農業採收、倉儲物流及港口起重機自動化等重工業領域。