2015年7月,美国国家航空暨太空总署(NASA)的新视野号(New Horizons)太空飞行器飞越冥王星,向全世界提供了这个矮行星与其卫星的壮观图片(图一)。新视野号还延续它的任务,在2019年飞越了小行星486958(Arrokoth)时,将探索范围拓展至古柏带(Kuiper Belt)传回太空飞行器探索过最遥远距离的的天体图片。
同一时间,第二艘太空飞行器是NASA的欧西里斯号(OSIRIS-REx),在2016年发射,目的是要从小行星贝努(Bennu)的表面采集样本。於2020采集到样本之後,会在2023年将样本带回地球。这段期间,NASA还在2021年发射了露西号(Lucy),它将成为第一艘造访木星的小行星Trojan的太空飞行器。
| 图一 : 新视野号太空飞行器飞越冥王星和卫星Charon的展示图 |
|
这些并行的NASA任务都背负着一个共同目标:为科学家提供需要的资料,以助於更深入了解我们的太阳系,包含太阳系的形态以及其中的天体。这三项任务还有其他的共通点就是它们都使用了由KinetX Aerospace的团队建立的光学导航(optical navigation;OpNav)软体。
OpNav技术使用摄影机影像来判断太空飞行器与行星或小行星等天体(celestial body)的相对位置。KinetX的影像处理软体套件(KinetX Image Processing software suite;KXIMP)是以MATLAB开发,处理装配在飞行器上的摄影机捕捉到的影像。这些影像向下传输回地球,用来计算惯性摄影机的位态、视野背景恒星与天体的形心(centroids)。
MATLAB帮助团队加速完成高度精确的OpNav演算法开发和除错。以OSIRIS-REx任务为例,中心定位演算法可达到30公分以内的准确度,或者大约是小行星直径的0.06% --大幅超越任务的导航概念操作(Concept of Operations;ConOps)所预测的准确度。
OpNav需求与快速开发的重要性
传统的深太空导航仰赖辐射追踪资料,这种资料可以用来估计太空飞行器与地球的相对位置。当目标轨迹的不确定性很低时,这种方法的准确度就已足够。然而对於像新视野号、OSIRIS-Rex、露西号这样的任务,以无线电为基础的导航虽可以使太空飞行器到达接近的位置但接近程度还不足以最大化任务的科学效益。相较之下,OpNav提供目标与太空飞行器相对位置的量测值,促成更远大的导航准确度,并且具备将太空飞行器的摄影机与科学仪器更精准地导向目标的能力。
一开始为OpNav进行开发环境评估的时候,我们还只是一个很小的团队。我们需要优先进行快速开发和除错,也就是不希??从头撰写过於大量的低阶影像处理演算法。MATLAB和Image Processing Toolbox(影像处理工具箱)提供许多从一开始就需要的惯例和函式。同样重要地,我们也需要具备随着新资料的取得而快速执行变更的能力,在新视野号接近冥王星时更是强调了这项能力的重要性。
由於反照率(albedo)的变异,行星当中最亮和最暗的部位会在影像形成无法预期的高度对比,这时就需要仰赖KXIMP的帮助。我们需要进行的变更相当复杂,而且在任务接近关键的营运阶段时,在MATLAB快速进行这些变更的实现与除错的能力致关重要。
使用KXIMP来导航至行星目的地
我们运用相同的基本流程,将KXIMP软体套件使用於每一项任务,这套流程会在接收到来自太空飞行器装载的摄影机拍下的影像时开始。作为第一步,我们使用在MATLAB开发的影像校正惯例来移除失真并且修正影像。
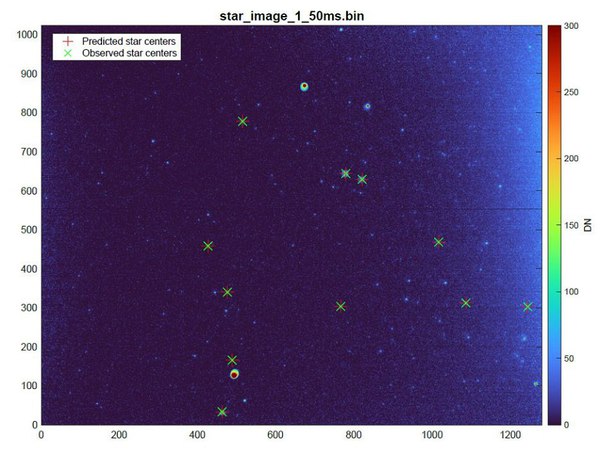
接下来,我们会执行KXIMP的位态判定演算法,该演算法拟合一个抛物面来找出图片中每一个恒心的子像素中心(图二)。接下来,演算法会依据行星类别和一个位态的先验(a priori )估计来计算预测图片中的恒心中心。然後,再根据观察到及预测的恒心中心,执行Optimization Toolbox(最隹化工具箱)之中的最小平方拟合来计算摄影机的惯性位态。
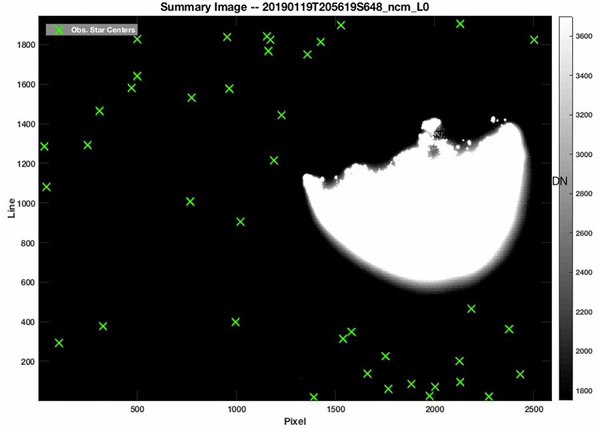
| 图二 : 背景恒星(十字标示处)以及图片右侧的小行星贝努 |
|
当我们判断出摄影机的位态,下一步是要找到目标(例如冥王星、小行星486958或小行星贝努)的形心。用来计算形心的演算法会透过一张使用KXIMP关键功能产生的模拟图片与来自太空飞行器的影像关联。该模拟图片是使用透过MATLAB的SPICE工具取得,由NASA的Navigation and Ancillary Information Facility (NAIF)提供的SPICE工具箱内的一个digital shape kernel档案的资料所建立。透过这组形状资料、太阳与目标的相对位置、目标的旋转状态,我们演算法运用光束追踪(ray tracing)技巧来产生模拟图片(图三)。
由於处理时间是一项重要因素特别是太空飞行器是以每秒14公里的速度行驶我们使用Parallel Computing Toolbox(平行运算工具箱)在一个多核心处理器执行光束追踪来加快这部分的处理速度;接着再透过真正图片和模拟图片的2D互相关(cross-correlation)计算出目标的中心。
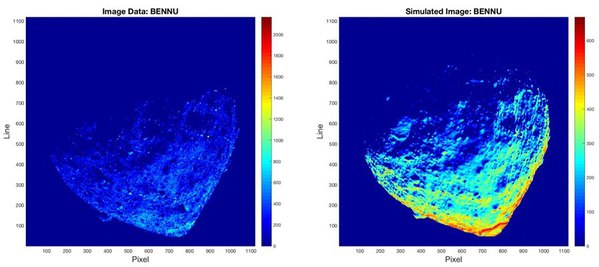
| 图三 : 真正的小行星贝努影像(左)和透过KXIMP产生的模拟贝努图片(右) |
|
在更远的距离,目标通常只有几个像素宽,而无法从真正的照片分辨。在这个操作阶段,我们使用KXIMP内的影像叠加(image coadding)、行星相减(star-subtraction)、和次取样(subsampling)等技巧,制作出能够呈现更好的有效解析度(图四)和讯噪比(signal-to-noise ratio)的图片。
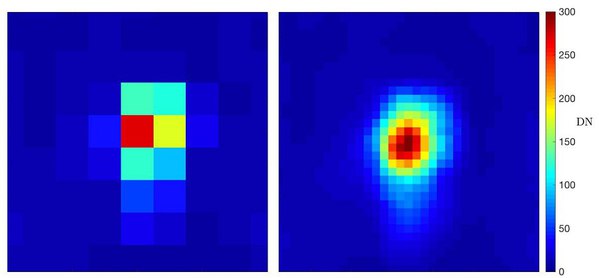
| 图四 : 小行星486958(Arrokoth)的原始图片,图片左侧的目标物为一个可见的未解析点源,图片右侧为经过4倍次取样的对应图片。 |
|
为飞行器上的OpNav产生程式码
对於新视野号、OSIRIS-REx、和露西号任务,KXIMP OpNav会在影像传回地球时进行处理。然而若要更进一步,会有更多的处理使用飞行器上的系统执行自主的OpNav软体来实施,我们团队正积极地进行这些工作。
以NASA的LunaH-Map太空飞行器为例,我们使用MATLAB Coder为位态判定、恒星形心、和未解析的目标从既有的演算法产生C程式码(图五),也从新的水平基准导航演算法产生C程式码。这些产生出来的飞行器上的位态判定与未解析中心寻找软体已经成功地在LunaH-Map任务进行测试,为配备自主OpNav软体的未来太空飞行器打下基础,使其只需要少量、或甚至不需要基於地面的导航支援,便能完成其深太空任务。
| 图五 : 御夫座(constellation Auriga)的LunaH-Map恒心追中器影像,标记处代表由KinetX软体为位态判定的所选择的恒星。 |
|
(本文由??思科技提供;作者Derek Nelson、Coralie Adam任职於KinetX公司)






