下一代全自動駕駛汽車已呼之欲出,其主要目標是全面提升交通運輸系統的效率,並提高駕駛和乘客的乘車安全。事實上,根據美國交通部的研究,自駕車可消除人為疏失,進而將交通事故的死亡人數大幅降低 94%。
然而,想要實現此一願景,汽車OEM製造商所開發的下一代自駕車,必須超越其目前的SAE(國際汽車工程師學會自動駕駛)等級,亦即從2+/3級躍升到5級(參見圖一)。這讓製造商面臨許多前所未有的挑戰,並且極需推動技術發展。
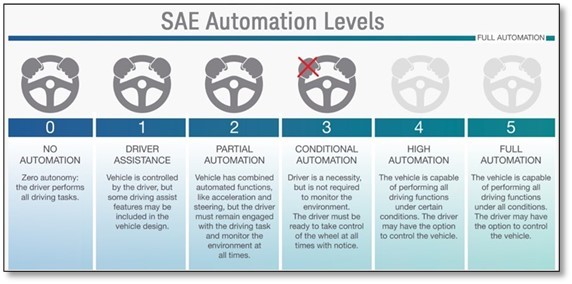
| 圖一 : 國際汽車工程師學會(SAE)制定的自動駕駛等級 |
|
困難重重 迎面挑戰
為實現自動駕駛的願景,汽車製造商必須克服各種重大挑戰和落差,包括縮小真實路測和軟體模擬測試之間的落差。目前汽車製造商是透過迴路測試,在軟體模擬環境中測試感測器和控制模組。軟體模擬雖然重要,但它無法完全複製真實路況以及感測器回饋的潛在缺陷。
自駕車必須解決缺陷
有鑑於此,汽車OEM製造商必須在真實道路上測試原型車,或可合法上路汽車所配備的整合式系統,以便在正式推出新車之前,先進行完整的驗證。路測是汽車開發過程中不可或缺的環節,但製造商需投入大量的成本、時間,同時還需克服可重測性的挑戰,因此完全依賴道路測試來進行驗證是不切實際的。這種方法需累積數百年的時間,才能保證汽車在城市和鄉村道路行駛時百分之百安全可靠。
因此,製造商需根據真實狀況來訓練先進駕駛輔助系統(ADAS)或自動駕駛汽車(AV)的演算法。測試汽車雷達,是訓練自動駕駛演算法的關鍵。這些演算法透過汽車雷達感測器所擷取的資料,來決定汽車在特定駕駛狀況下應有的反應。如未經過適當訓練,這些演算法很可能會做出意料之外的決策,進而危及駕駛人、乘客或行人的安全。
舉例而言,在開車時我們需迅速做出許多決策,因此需累積一定的時間和經驗才能成為一名優良駕駛。為了將自動駕駛提升到全新境界,需要一套能力遠遠超越最出色的駕駛人的極精密系統。感測器、精密的演算法和強大的處理器是實現自動駕駛的黃金陣容。
感測器可偵測即時環境,而處理器和演算法則可根據道路規則做出正確的決策,並對新的 ADAS 功能充滿信心。使用未經驗證的系統進行路測,其風險極高。一套能夠模擬真實情境,以便驗證實際的感測器、電子控制單元(ECU)程式碼、人工智慧(AI)邏輯的系統,是成功的關鍵。在測試大量情境後,OEM 製造商可清楚得知,何時該停止使用ADAS功能,或者何時可信心十足地發布此功能。
現有解決方案的不足
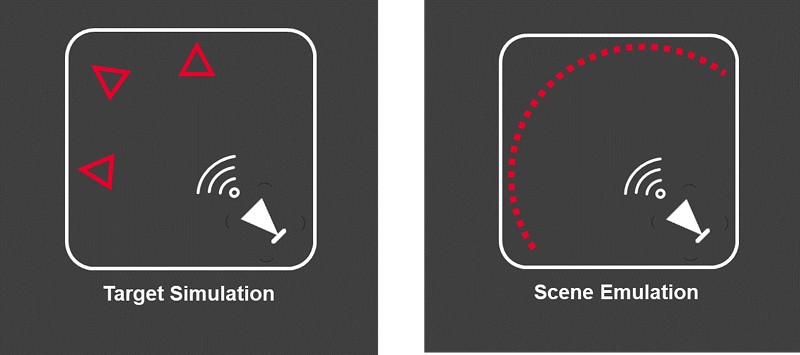
當今的測試系統無法有效地因應這些挑戰。有些系統使用多個雷達目標模擬器(RTS),每個模擬器都可將單點目標(Point Target)呈現給雷達感測器,並以機械方式移動天線以模擬水平和垂直位置;然而機械自動化操作會讓整體測試變慢。另外有一些解決方案只需幾個RTS就可建立一個天線牆,這表示物體可出現在情境中的任何地方但不能同時出現。此方法可在靜態或準靜態環境中,以機械手臂所能支援的速度,將少數目標進行橫向移動以便進行測試。
目前的雷達感測器測試解決方案的視野(FOV)有限,無法辨識距離不到 4 公尺的物體。為了彌補落差,工程師需要一種新的雷達感測器測試方法,亦即將過去透過目標模擬來進行物件偵測改成全場景路況模擬,以便在進行實際的道路測試之前,先在實驗室中進行測試。如果僅以少數目標來測試雷達感測器,其駕駛情境視野會不夠完整,而且無法呈現真實情境的複雜性。
全面克服挑戰
藉由在實驗室中進行全場景模擬,是開發穩定雷達感測器和演算法的關鍵。汽車 OEM 製造商可將複雜的駕駛情境,從道路搬到實驗室中,相較於勞師動眾地到戶外進行路測,利用複雜且可重複的情境,並透過大量的靜止或移動物體、不同的環境特性等,更快測試更多樣化的駕駛情境。如此可顯著加速先進駕駛輔助系統(ADAS)/自動駕駛汽車(AV)的學習速度。
以目前是德科技的全場景模擬器為例,已經可以將數百個微型射頻前端,整合到一個可擴充的模擬螢幕中,最多可模擬 512 個物體,模擬距離最近可達 1.5 公尺。這種模擬器採用專利技術,將原先透過目標模擬來偵測物體的方法,轉變成真實交通情境模擬方法,(參見圖 2)。 這個新方法具有許多優點:
縱觀全貌
透過全場景模擬器,雷達感測器便能以更寬廣的連續視野,快速偵測更多近距離和遠距離目標。如此可彌補雷達視野不足之處並改善演算法訓練成效,以便在密集、複雜情境中,偵測並辨識各種不同的物體。如此一來,自動駕駛汽車可看清全貌,而不是僅根據測試設備所看到的,來制定決策。全場景模擬器可以透過512個獨立目標,以及±70°方位角和±15°仰角的連續視野(FOV),全面測試雷達感測器和系統。也可在1.5公尺至300公尺的範圍內,以0至400 kph的速度,產生靜態和動態目標。或者以小於1度的角解析度,處理多目標、多角度情境。透過逼真的干擾測試,模擬布滿無線網路的複雜城市情境。
測試真實情境的複雜性
如果僅以少數目標來測試雷達感測器,其駕駛情境視野會不夠完整,而且無法呈現真實情境的複雜性。透過雷達場景模擬器,OEM 製造商可在各種不同的環境條件下,包括交通流量密度、速度、距離,以及不同的目標數量,在實驗室中輕鬆模擬真實駕駛情境。此外,製造商可及早測試從一般到極端案例的各種情境,進而將風險降到最低。
加速學習
雷達場景模擬器可以提供確切的真實環境,方便工程師在實驗室中測試目前只能透過路測進行的複雜情境測試。這種測試方法讓OEM製造商能夠利用複雜且可重複的情境,並透過大量的靜止或移動物體、不同的環境特性等,來及早測試各種情境,以便加快 ADAS/AV 演算法學習速度,並消除手動或機器人自動化作業效率低落的問題。
更快測試更多情境
透過動態解析度調整顯示功能,立即檢測ADAS軟體中的間隙或不當行為。並可模擬複雜、具有大型平面物體的真實情境,以產生逼真的駕駛情境,例如有多個目標的高速十字路口。
結語
汽車製造商深知測試自動駕駛演算法,是一項極度複雜的任務,如未謹慎處理,可能引發安全問題。對於極度重視安全性的自動駕駛開發人員,雷達場景模擬器是一種理想的選擇。透過雷達場景模擬器來提供全場景顯示功能,就能以寬廣的連續視野(FOV)模擬近距離和遠距離目標,並且利用複雜的多目標情境,更快測試自動駕駛系統中的汽車雷達感測器。
經過多年合作,是德科技與IPG Automotive和Nordsys共同打造了自動駕駛模擬(ADE)平台,此雷達場景模擬器是其中的關鍵元件。這三家公司合作開發的ADE平台,透過預先定義的使用案例來執行ADAS和AV軟體。這些使用案例將時間同步輸入,套用於汽車內部的感測器和子系統,例如全球衛星導航系統(GNSS)、V2X(Vehicle-to-Everything)、相機和雷達。ADE是開放式平台,讓汽車OEM製造商及其合作夥伴能夠專注開發並測試ADAS系統和演算法,包括感測器融合和決策制定演算法。汽車 OEM 製造商可將該平台與商用3D模型、硬體迴路(HIL)系統,以及現有的測試和模擬環境進行整合。
是德科技雷達場景模擬器和自動駕駛模擬平台,可協助汽車 OEM 製造商順利開發實現全自動駕駛所需的全新ADAS功能。
(本文作者為是德科技行銷處資深專案經理)