儘管全球製造業暫時受到COVID-19的影響,但AMR市場規模卻呈現上升趨勢。以下是研究機構對於市場規模的進展和預測,以及AMR廠商的動向。
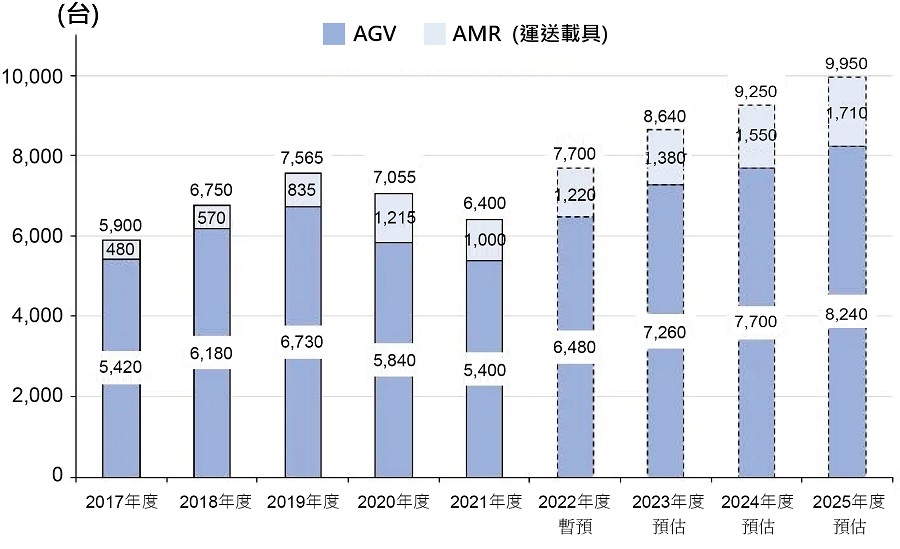
以日本市場為例,根據矢野經濟研究所調查顯示,2017年至2019年AGV/AMR無人搬運車市場呈現穩定成增長,但在2020年,由於COVID-19的影響AGV/AMR出貨量下降了6.7%,為7,055台,但如果只計算AMR的市場規模的話,卻是比前期增長了許多。
不過,在2021年受半導體短缺影響,AGV/AMR出貨量下降到了6,400台。然而,從2022年開始,因為資本投資需求的增加,和因應勞動力短缺,對AGV和AMR的需求預計將再度增加(圖一)。
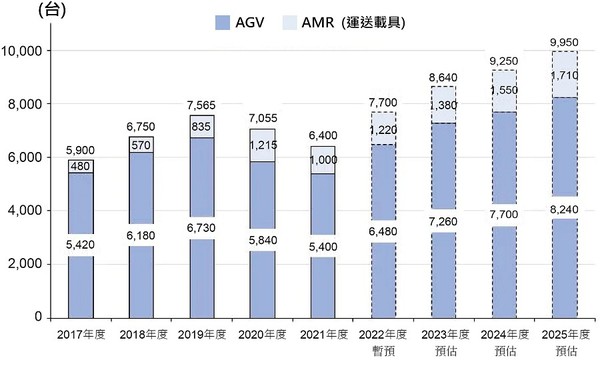
| 圖一 : AGV/AMR在2017~2025的出貨量統計與預測。(source:矢野經濟研究所;作者整理) |
|
AMR儼然已成為「下一代AGV」
AMR即將成為製造和物流產業「下一代AGV」的未來主流之星,除了可提供最基本的自動化運輸貨物功能外,還可支援揀選等智慧化功能。雖然兩者由於開發目標相似而容易混淆,但在「行駛路線」、「處理障礙」和「與人員協同」等方面卻存在著相當明顯差異(表一)。
另一方面,AMR是利用「SLAM」技術,根據攝影鏡頭和高性能感測器「LiDAR」等的傳送感測數據,同時自我定位並產生環境地圖、檢測出人員和障礙物後避開,並自動設計出路線並且移動。因此與AGV最大不同的是,AMR可以在任何地點與人員協同作業,不受固定磁性導引路線的限制。
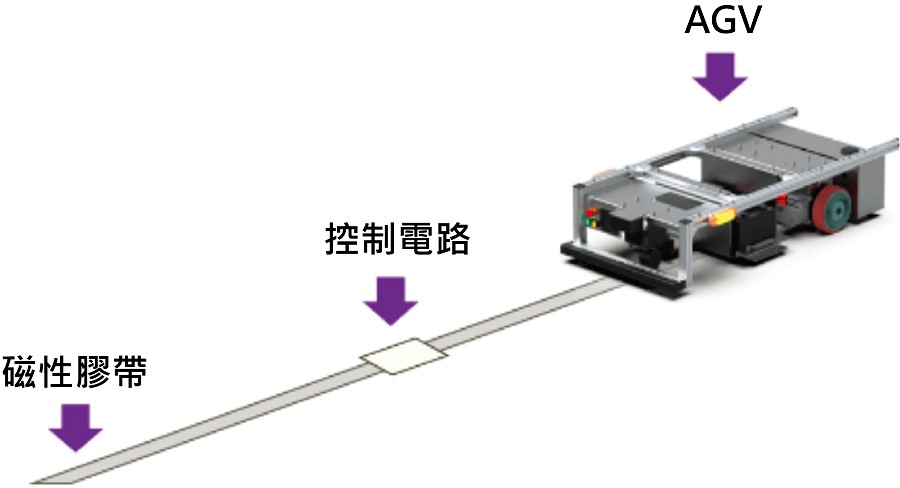
就如表一中的差異對照,AGV必須透過引導機制,讓搬運車沿著由磁性導引和其他地面導軌設置(圖二),進行固定路線運輸貨物,當初碰到設定外的情況時,AGV就有可能無視下繼續運行,或是立即停止。相反,AMR並不需要預先設置引導路線,可通過感測技術等來判斷自身的位置,並且自動規劃出到達目的地的路線,這與AGV有很大區別。
例如,如果路線上有障礙物,AGV可能會依照突發事件原則而停下來,無法繼續運作;但AMR因為其高度智慧化的基礎下,可避開障礙物並自動重新規劃路線。因此基於這些特性,AMR可以透過共享操作範圍來與人員進行協同作業。
(表一)AMR與AGV的差異性(source:NIKKEN;智動化整理)
|
設計目標
|
智慧運輸機器人(AMR)
|
自動搬運車(AGV)
|
|
行車路線/活動範圍
|
自動計算路線/自動駕駛
|
固定路線/引導駕駛
|
|
障礙物
|
規避/改道
|
停止
|
|
與人員協同
|
可以
|
不可能
|
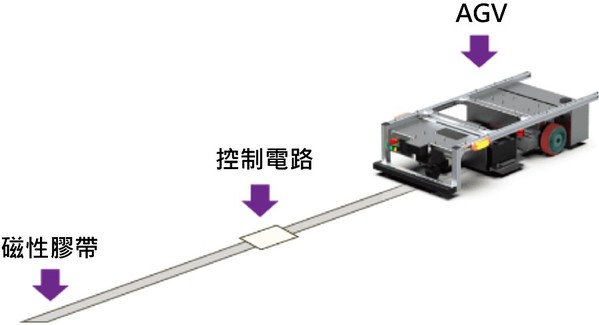
| 圖二 : 磁導軌道式的AGV(source:SHARP;作者整理) |
|
導入AMR的優缺點分析
但是AMR並非完全沒有缺點。雖然AMR在自動駕駛、避障等方面有著明顯的優勢,但在真正導入之前,還有一些問題需要確認(表二)。
(表二)導入AMR優缺點(source:NIKKEN;智動化整理)
|
導入AMR優點
|
導入AMR缺點
|
|
●容易與人員協同作業
●容易靈活地因應工作環境的變化
●可以縮短作業人員的移動距離
●可以減少人為錯誤
●可透過改進工作來提高生產效率
|
● 引進成本高
● 需要確保機器人行動的空間
● 需設定複雜作業與障礙排除模式
|
首先來看成本問題。在引入AMR時,除了AMR本身的成本之外,還需要投入與控制AMR系統相關的軟硬體、網路等成本。另外在單一搬運單元方面,AGV的每台成本只需20萬台幣左右(依品牌及功能性不同,價格也會有所差異)即可購買,而每台AMR卻需要數10萬台幣,甚至高達百萬台幣,有些AMR的價格更超過200萬台幣以上。
同時,確保通道空間對於AMR的操作也是相當重要。因為與人員協作作業時,還需要考慮人員經過的流線,因此定義AMR操作也可能是一項挑戰,例如確定工作程序和工作區域劃分。
儘管存在這些挑戰,為什麼AMR被視為「下一代AGV」?無外乎以下優點大於缺點:
● 能夠與人員協同作業
● 減少作業人員的移動距離和工作量
● 透過節省勞動力、減少人為錯誤,來提高成本效率
● 對工作環境和突發變化的應變能力
AMR將同時扮演Local 5G的行動基地台
與有線連接不同,無線連接是不可見的。而且影響因素多種多樣,很難找出故障原因。由於只有當系統首先受到影響時才會檢測到故障,因此通常很難識別和解決問題的根本原因,而出現不必要的停機。由於多種因素的影響,對無線連接進行故障排除和管理都是非常困難。因此在工廠裡,機床和自動運輸機器人等故障常常會引發諸如「突發性停機」之類的麻煩,而導致生產過程停止,造成無法預期的巨大損失。
而在數位轉換的趨勢下,因為工廠網路採用Wi-Fi無線化,最被導入工廠最擔憂的莫過於因無線電波干擾,再加上AGV和AMR會在倉庫內不斷移動,安裝在移動AGV上的終端設備必須在AP之間無縫漫遊,同時還應該支持無線通訊協定,來允許PLC和遠程控制器之間的相互通信。因此設置Wi-Fi可能非常複雜、耗時且容易出錯。若頻繁發生短暫的數據漏失,甚至造成整個無線網路的延遲或通訊中斷。因此,僅僅片刻的停頓就造成數百萬元以上損失的情況並不少見。
相比之下,Local 5G受到無線電波干擾的風險非常低。雖然導入和運營成本比Wi-Fi高,但許多製造業因為看上其穩定性,而有出現較高的導入意願。
但是,採用Local 5G時,必須建設一定數量的基地台,即使傳輸量相當低的區域,也無可避免地必須設置。另一方面,即使生產線的利用出現時高時低時,也無法快速進行基地台設置的調整,使的讓網路效益最佳化。
基於可能因為基地台設置的投資浪費下,NTT East也將Local 5G的調變器整合到ARM無人載具中,讓ARM變身成為一座座Local 5G的基地台,可在Sub6頻段進行無線通信。同時,NTT East還開發了生產執行平台,可連接製造和物流的每台設備,並對其進行集中管理。透過使用Low-Code工具「Node-RED」直覺式的建立每個流程,來更容易重新佈置生產線。
AMR的移動感測架構將比數位分身更具優勢
對於工廠自動化演進來說,「數位分身」並不是一個陌生的名詞。
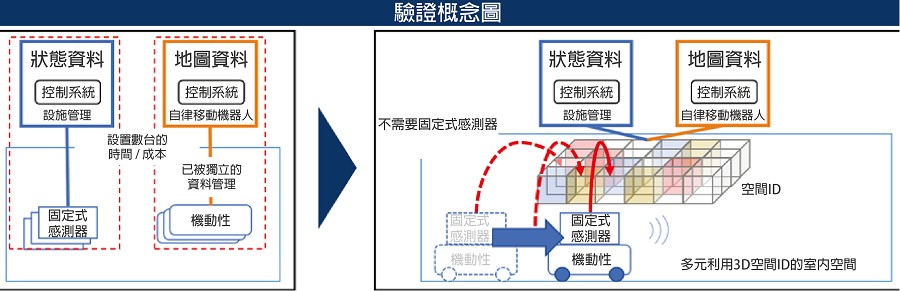
數位孿生需要整合來自所有地點和時間的事物、和人的數據,並能夠利用這些數據進行適當的規劃、協作和決策。但這樣的基礎下,所獲得的結過並不詳盡,因為它僅限於事先設定運作的區域來使用搬運設備。此外,數據收集成本高昂且耗時。因此針對這一問題,可以透過AMR的移動感測架構,來減少安裝固定感測器所需的成本和精力,並且預計可套用在各種情況下,進一步的以擴大收集區域(圖三)。
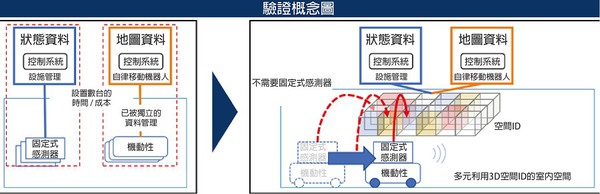
| 圖三 : 透過AMR的移動感測架構,來減少安裝固定感測器。(source:NTT Data;作者整理) |
|
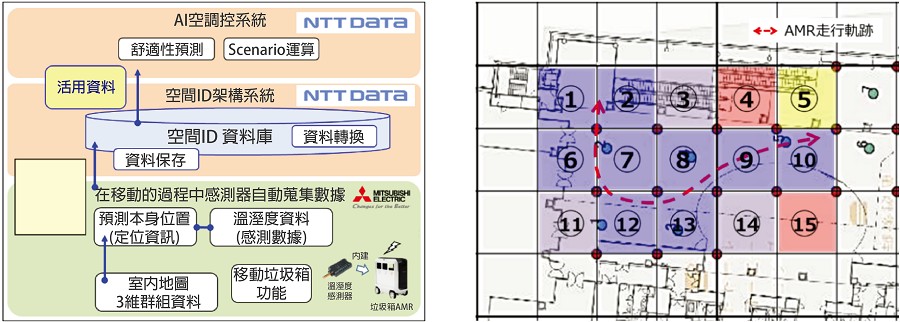
基於這樣的概念,三菱電機在2023年1月進行一項驗證性計畫。三菱電機在將NTT DATA品川大廈2樓入口層,放置一部內建溫濕度感測器的垃圾桶AMR,並且讓這部AMR進行自主移動,透過移動過程中蒐集溫濕度數據,並且整合到與空間ID基礎設施系統之中。
這部垃圾桶AMR在進行基本工作之外,同時還進行來客人數、室外溫度、空調運轉狀態等數據的蒐集,在透過AI空調控制運算技術,將空間中的溫度/冷卻指數(Predicted Mean Vote)調整到最架化,更進一步的達到降低能耗。如此一來,如果在這個空間中設置了多部垃圾桶AMR,並且同時運作的話,在這個3D空間空間中,就會形成數據蒐集群組(圖四)。

| 圖四 : 內建溫濕度感測器的垃圾桶AMR在NTT DATA品川大廈自主移動。(source:NTT Data) |
|
透過實地的驗證結果,證實了基於內建感測器的AMR進行自主移動下,可以獲得相當於利用固定感測器的數據,而且即使是僅依靠不斷移動下,所獲的的動態感測數據,人工智慧的空調控制系統依舊可以順利運作。
因此在這個驗證計畫中,設施除了將透過非定點的垃圾桶AMR保持清潔外,人工智慧的自動空調控制,也可利用設置關鍵的空間ID,將資訊附加到空間體制上,將3D空間劃分為人類和自主移動機器人可讀取的內容,從而有助於減少設施的負擔(圖五)。
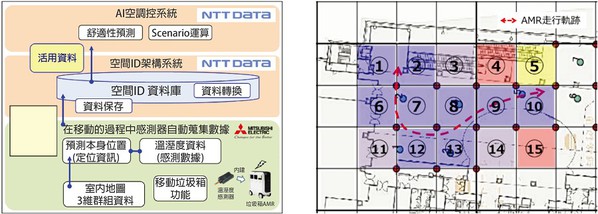
| 圖五 : 利用設置關鍵的空間ID,將資訊附加到空間體制。(source:NTT Data;作者整理) |
|
日本各產業積極投入AMR的應用與商機
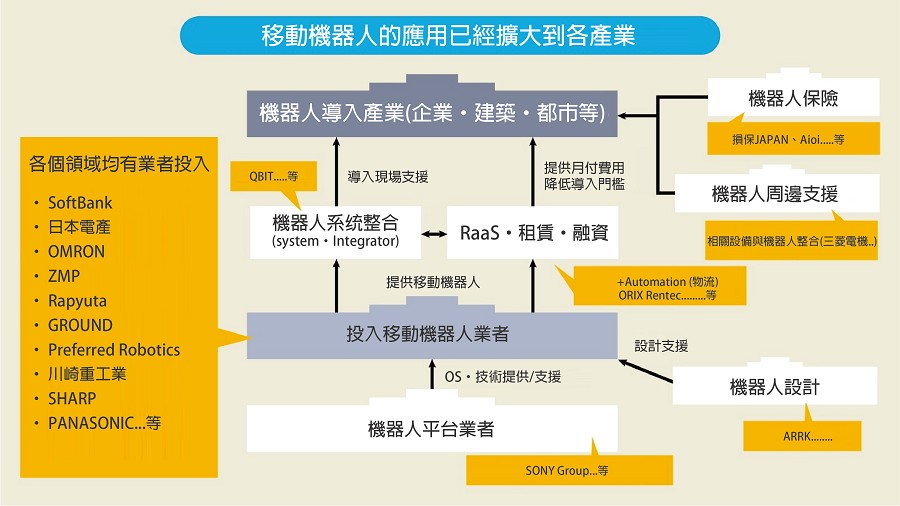
目前日本各產業也積極的擴大AGV/AMR等搬運載具的可應用性,不僅只將市場侷限於自動化生產應用,更是擴展各行各業,更進一步的支援這些應用的周邊相關業者的生態系統也逐漸在建立(圖六)。
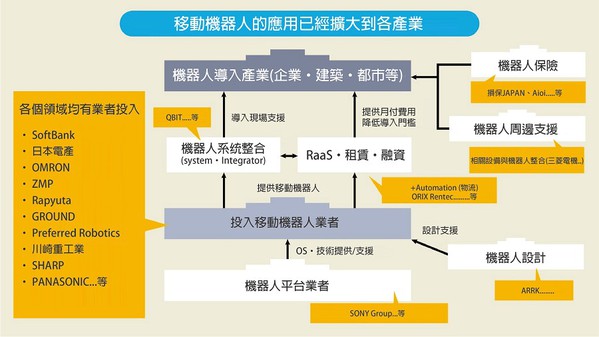
| 圖六 : AGV/AMR的應用與商機,已擴大到日本的各行各業。(source:JIC Venture;作者整理) |
|
因此,AMR的應用,已經不只限於工廠和倉庫等環境,更擴展到建築工地、餐廳和飯店等服務業,甚至城市公眾設施。
透過磁導方式作為移動依據的AGV已有幾十年歷史。但在智慧能力不斷的被要求下,今天AMR的基本能力值,包括搬運載具的機制、檢測障礙物系統能力,以及同時多工控制大量搬運載具車的系統,經過這些年來持續的進化下,在作業移動的操控技術方面,大多都已非常成熟,就運行穩定性而言,已經是相當可靠。
不過,對於系統軟硬體的進化方面來說,AMR仍是一項新技術挑戰,作為智慧無人搬運載具仍有進化空間。
AGV和AMR都是有助於減少作業人員的工作量。AGV/AMR的作業能力除了物料的運輸外,還可以透過附加機械手臂,進行零件的運輸、物料的投入和收集等原本由人類手動才能完成的工作,不僅可以期望降低勞動力成本,還可以減少人工錯誤。
先進的自動化總是需要大量的初始投入成本,例如資本投資和大量的導入的費用負擔,更無法能立即獲得良好的成效或回收。然而,從長遠來看,持續運營應該會得到回報。因此,與其著眼於眼前的結果,不如著眼於未來幾年而在早期考慮引入。
註一:空間ID是一種在三度空間中,進行識別地理空間資訊的機制,這是DADC和經濟產業省在根據數位廳的要求進行研究。