汽车电子总线网络的特性
汽车本身就是一套整合各类复杂系统的行动装置。如今汽车已开始逐渐摆脱单纯以机械连杆或油压原理来驱动控制煞车或驾驶系统的设计架构,朝向以汽车电子系统来操作控制传输讯息。一部汽车平均有80个以上的电子零组件和模块在运作,汽车电子系统正迈向多核心网络的车电网络系统架构(Multiple Core Networks Vehicle Electronics System Architecture)目标前进。
| 《图一 多核心车电网络系统架构示意图 》 | 数据源:Renesas |
|
因为汽车不能像计算机可以当机,否则会提高驾驶风险,属于高可依赖式系统(dependable system)的汽车电子系统,特别在引擎/传动和悬吊/底盘系统上,除了严格讲究不容些许差池的高安全性外,也要避免电磁干扰(Electromagnetic Interference;EMI)、提高操作可靠性以及简化系统控制。但汽车内部各采用不同网络架构,电子控制单元(ECU)越来越多,整体引擎/传动系统、悬吊/底盘系统、车身系统、资通娱乐系统、安全系统与防盗保全系统的链接架构已因此更为复杂,带宽需求也越来越高,于是如何提升控制讯息的精确性,便相当重要。这时汽车若还是采用以往传统电缆方式,设计会更麻烦、线材成本会更沉重、检测保养也会更繁琐,因此以总线(Bus)方式为基础取代电缆传输的架构,除了能解决上述问题外,也能排除线路老化或磨损的问题。
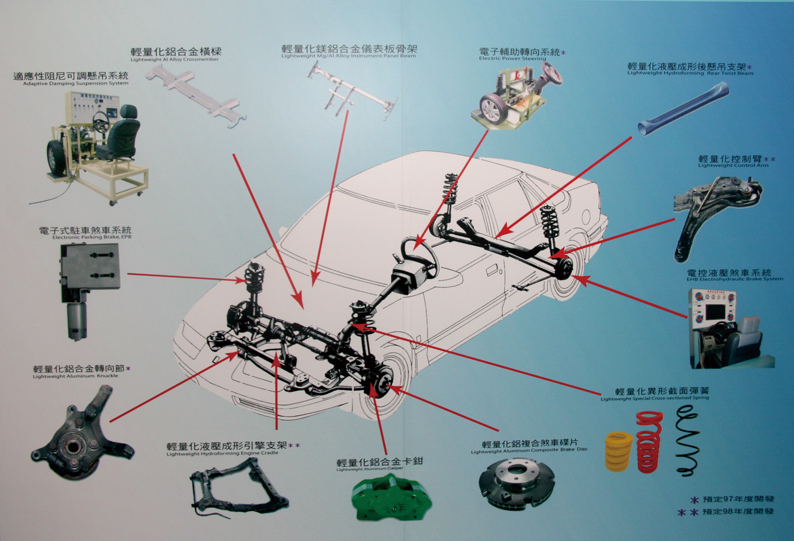
| 《图二 车辆底盘次系统示意图 》 - BigPic:793x540 | 数据源:2007年台湾车辆国际论坛(TAIFE 2007)现场 |
|
总而言之,汽车电子产业需要的是:藉由整合标准化设计的高速车用总线(Data Bus)与新一代车用网络架构,符合车用安全相关严格的检验程序,支持车内各分布式控制系统,有效提升不同微控制系统间或是与传感器之间的数据传输和实时通讯控制。这个网络架构就需强调时间触发快速响应紧急讯息的确定性(Deterministic)功能、具备高传输速率、拥有容错(Fault-tolerant)能力、可结合高性能MCU以及收发器、能满足电子线控(X-by-wire)等特性。
各类车用总线网络简介
与一般计算机结构较不同的是,车用系统总线通常包括网络分层结构,不同的车用总线协议,是针对不同的局部控制或是整车系统控制所设计,因此功能上也有所差异。目前车用总线大致可分为五大类:
- ●LIN、TTP/A:传输速度最低,适用于车体控制;
- ●低速CAN、SAE J1850、VAN(Vehicle Area Network)等:属于中速网络总线,适用于对实时性要求不高的通讯应用;
- ●高速CAN、TTP/C等:适用于高速、实时死循环控制的多路径网络结构;
- ●IDB-C、IDB-M(D2B、MOST、IDB1394)、蓝芽IDB-Wireless等:专门应用于在车载资通娱乐网络当中;
- ●FlexRay和Byteflight:应用于关键实时性高的安全系统控制中。
CAN
目前车用总线网络协议,大部分以铜线为材质的CAN(Control Area Network)以及LIN(Local Interconnect Network)等为主,CAN或LIN最多只能支持1Mbps和20 kbps的传输速度,不过设计灵活,均仍扮演重要角色。由德国车厂提出在分布式车身控制系统中的CAN总线已有20余年,最初动机就是为有效管理现代汽车越来越多ECU之间的讯息传输,并减少不断增加的铜线线路。CAN主要控制车内各电子系统装置及ECU之间的讯息传输,被广泛应用在像是仪表板、安全气囊、汽车动力及车身控制系统中,目前仍是汽车内部通讯的主流标准。
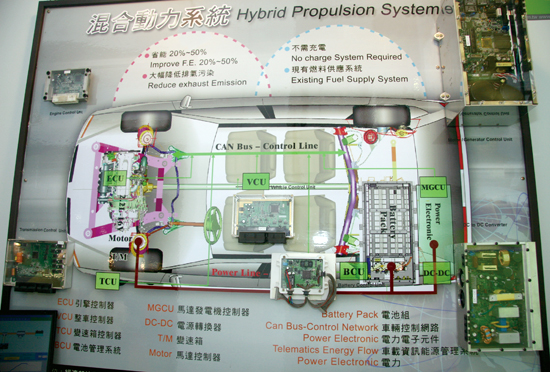
| 《图三 以CAN为核心的混合动力系统 》 | 数据源:2007年台湾车辆国际论坛(TAIFE 2007)现场 |
|
LIN
以CAN为核心的混合动力系统
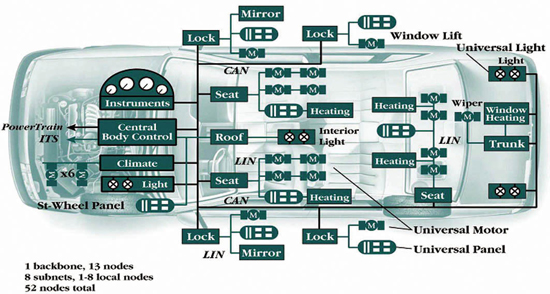
| 《图四 结合CAN/LIN总线的车体分布式控制系统示意图 》 | 资料来源:http://www.semiapps.com.cn/content.php?content_id=60721135707468000&node_id=22 |
|
不过随着车用多媒体娱乐系统应用日渐普及,带动高频宽车用网路的设计需求,光纤为主的光通讯汇流排也正在崛起,以用来增加传输效率、减少车辆线路以及降低电磁干扰EMI等,这包括Byteflight、MOST、IDB-1394甚至是FlexRay等。
MOST和IDB-1394
其中MOST最被看好成为下一世代车用多媒体娱乐传输标准。 MOST传输速度可达25和50 Mbps,IDB-1394则可提供400 Mbps。 IDB-1394非常灵活,可支援各种网路拓扑,包括汇流排、树状、环状或星状等。 MOST主要只支持环形拓扑,若需应用于要求更严苛的环境中,则可改采星状或双环状拓墣,此外MOST因没有接地回路,可避免电磁干扰。一般来说,MOST可做到每秒传输23M Baud,最多可支援64个装置。
FlexRay为何崛起
如上所述,新一代整合标准化设计的高速车用汇流排与车用网路架构,需可支援车内各分散式控制系统,能精确控制传递各系统电子元件的讯息。 CAN无法满足高速频宽的要求,亦缺乏容错能力,此外CAN比较欠缺安全控制上的即时传递效能,可能会引起控制反应迟钝问题。再者现有的LIN和CAN并非针对电子线控高速控制系统而设计,FlexRay可让各项操控都改以电子线控(X-by-wire)来操作,取代以往的机械连杆操控或油压操控架构。
FlexRay的设计初衷,也是补充现有LIN和CAN,并不是取而代之。在电控分散式系统中的所有应用资讯,都可藉由FlexRay通讯协定连接起来,相关功能可在一定已知时间范围内执行完毕。
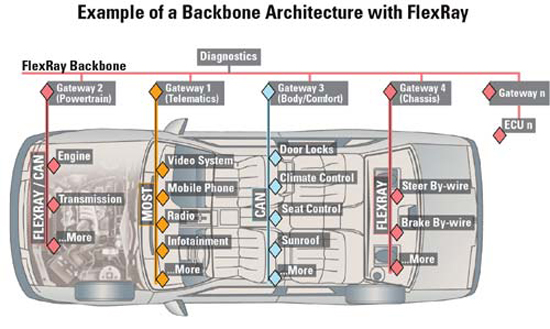
| 《图五 FlexRay骨干架构应用示意图 》 | 数据源:NEC Electronics Europe;www.eu.necel.com/.../040_flexray/index.html |
|
FlexRay功能面面观
FlexRay发展到现在已经进入V2.1阶段,单一通道(channel)传输速度可达10Mbps,大幅超越现有CAN的20倍。 FlexRay备受青睐瞩目,主要是因为具备容错与时间触发即时控制功能,能可靠并精确传送相关安全控制讯息,其双通道备援架构,正好符合高阶安全系统的容错备援需求。这将使汽车发展成百分百的电控系统,完全不需要后备机械系统的支援,比起目前的CAN Bus架构更能方便建构可依赖式系统(dependable system)。
此外,FlexRay可以藉由减少平行的CAN数目降低系统成本,并且可按应用需要选择支援包括汇流排、点对点、被动星状与主动星型拓墣(active-star topologies)的网路形式。拥有上述性能的FlexRay,便被视为是下一世代整合引擎控制和车身传动、底盘和悬吊、以及电子线控驾驶(X-by-wire)等的主流汇流排协定。
| 《图六 FlexRay整合CAN和LIN总线关键架构示意图 》 | 数据源:Renesas |
|
FlexRay整合CAN和LIN汇流排关键架构示意图
线控操作驱动
FlexRay的重要目标应用之一是线控操作,包括线控驾驶(drive-by-wire)、线控转向(steer-by-wire)、线控煞车(brake-by-wire)等。汉翔航空工业(AIDC)科技服务处处长林南助表示,电子线控技术就如同飞机系统的fly-by-wire数位飞行控制系统一般,需要较高的系统可靠度。FlexRay目标便是要减少车辆控制对液压系统的依赖程度,利用具容错设计的电气/电子系统,取代机械/液压操作架构,补充并进而取代目前的机械和液压零组件,使相关设计、制造、组装成本能够大幅降低。
| 《图七 以FlexRay设计线控煞车架构示意图 》 | 数据源:Renesas |
|
以FlexRay设计线控煞车架构示意图
林南助处长表示,在国际上导入某一特定功能的线控操作解决方案,必需同时考量市场导入时所需的车辆安全法规议题。因此在导入线控功能时,汉翔航空工业AIDC将以引进飞机系统fly-by-wire 设计时的可依赖性系统架构为基础,考量汽车驾驶操控的特性,进行系统实做、验证与量产成本的规划,作为确立目标功能的导入及评估依据。
时间触发(Time-triggered)
以往的CAN车用汇流排设计,多采「碰撞侦测」的事件触发型(Event-Triggered)方式,亦即讯息调度是藉由讯息识别字元暗中分配消息的优先顺序来排定,让低优先顺序讯息延迟、而高优先顺序讯息先行传送。因此除了最高优先顺序讯息,其他任何讯息的传输时间延迟顺序不定,这容易造成汇流排传输效率低落,无法确保传递时效。
FlexRay采用时间触发型的完全确定性(Fully Deterministic)传输方式,亦即控制讯号是根据已定义的时间进度传输,讯息必须相对所计划的任务顺序来调度。无论系统外部发生任何情况,在确定性的演算法中,FlexRay会预先定义精确且按特定输入设定为基础的输出结果,并且结果可控制接续的操作内容,让FlexRay能保持在50μS内的低传输延迟效率,借此确保将资讯延迟和讯息抖动降至最低,减少网路冲突的数量,这项功能对需要持续性的电子线控驾驶来说非常重要。
兼顾同步或非同步传输
FlexRay本身是以时间触发型为主,但也可在设计上锁定双取向应用,加入动态运用的微时槽(Micro Time Slot)机制,亦即每个电子控制单元讯息在通讯周期中,都分配到相对应唯一的固定时槽讯号,这便能掌握任务的静态及确定性,如此可兼顾事件触发型所需的应用传输特性。
| 《图八 兼顾动态与静态的FlexRay微时槽机制示意图 》 | 数据源:Freescale |
|
因此FlexRay能支援同步或非同步资料传输,同步资料传输便可实现时间触发通讯,以满足分散式控制系统对于可靠性的要求,确保每个讯息都能得到所需的频宽和时槽;而FlexRay以Byteflight协定基本原理所设计的非同步资料传输,在事件触发的通讯中,则允许每个节点利用全部频宽。
林南助处长便强调,FlexRay定义静态资料节以及动态资料节(static and dynamic segments)共存的架构,让系统设计更具弹性。静态资料节提供时趋式确定性的资料传输,动态资料节提供弹性的时间分割多重存取机制(flexible TDMA),工程师能够根据应用需求进行客制化设计。这也让FlexRay名符其实成为可兼顾静态和动态插槽的延展性系统。
备援性(Redundant)
车用环境恶劣多变,实体线路与协定传输都需具备较高的抗受性,FlexRay可支援备援性(亦称为冗余)的双通道传输方式,传输速度可达20Mbps。 FlexRay的备援性通讯能力,能实现硬体完全复制网路配置,设计人员可以结合两种或两种以上的拓墣类型来配置分散式系统。不过此种传输方式相当耗占传输频宽,所以备援性传输被视为选用功能,只针对严苛关键的必要传输才使用,并非所有传输都会运用。
容错(Fault-tolerant)
容错功能是当系统的不同部分出现故障,系统仍将按照设计继续运行。 FlexRay支援多种级别的容错功能,提高传输容错设计及运作缩放的可扩充性。具容错操作功能的FlexRay,对于确保线控?车系统的绝对可靠性非常重要。
简言之,FlexRay具有整体性的时基(Time Base),能达到容错性的时脉同步。行车环境即便恶劣多变导致干扰系统传输,FlexRay也尽可能保持传输运作的同步。
| 《图九 FlexRay网络通讯阶层架构示意图 》 | 数据源:Freescale |
|
FlexRay网路通讯阶层架构示意图
以往车控介面多只能用汇流排连接方式,FlexRay不仅支援能将车用电子及周边设备连接于被动式汇流排上的网路架构,也可采被动星状、主动星状、也能应用在组合上述的混合型拓墣结构中。 FlexRay有别于以往CAN Bus的直线式汇流排,让系统设计时可以增加点对点的主动星状连结,对于车辆碰撞后的挤压变形提供更高可靠性的容错连结模式。并且,星状拓墣可以检测到出现问题的分支或者传输时间超过限制的讯息,当检测到此类异常问题时,主动星状连接器便会断开受影响的网路分支,进而确保网路其他分支的通讯作业不受影响,倘若被动汇流排缆线长度超过限制,星状拓墣亦可作为耦合器。不过相对而言,星状线路成本也较高,汇流排模式则较为简易且价格低廉。
| 《图十 FlexRay网络拓墣结构 》 | 数据源:evaluation engineering;http://www.evaluationengineering.com/archive/articles/0305/0305flexray.asp |
|
至于被动汇流排拓墣的主要优势在于采用设计工程师目前熟悉的汽车网路架构,可有效控制成本。若在容错功能并非必要,而需更高频宽、更短延迟时间或确定性的传输方式时,被动汇流排拓墣非常有用。其典型的应用方式就是直接替换CAN,当速度低于1Mbps,网路允许以CAN汇流排结构支援传输;当速度在1Mbps以上时,不同的节点则可利用主动星状耦合器,以点到点方式进行连接。
| 《图十一 FlexRay节点结构示意图 》 | 数据源:Fujitsu |
|
抗干扰光纤传输
FlexRay能同时支援CAN、LIN及MOST等电气与光纤物理层,这可使车厂根据需要采用客制化布线方案。光纤传输具有不受电磁干扰EMI的特点,而电磁干扰可对电气线路上的通讯,造成很大的破坏性。林南助处长进一步说明时便指出,FlexRay实体层的分离终端(Split-termination),能导引外界射频产生的电流,进而提升系统的抗干扰能力。
| 《图十二 FlexRay与CAN在车用环境的耐受程度比较图 》 | 数据源:Freescale |
|
FlexRay与CAN在车用环境的耐受程度比较图
FlexRay应用发展现况
| 《图十三 BMW开发FlexRay应用阶段示意图 》 | 数据源:Freescale |
|
BMW开发FlexRay应用阶段示意图不过FlexRay协议的微控制器与收发器不会整合于单一晶片中,因为FlexRay联盟规定为了提高安全性,将控制协议的晶片与收发器晶片分开,此外这可降低整合两者不同制程的技术难度。
若要在收发器和微控制器通讯之间,用FlexRay协议落实控制功能,基本方法有两种,其一是设计独立的通讯控制器IC,另一是将采用FlexRay的平台策略整合在MCU架构中。将MCU和通讯控制器整合在单颗晶片上,可减少元件数量,降低组件成本并缩短工程设计时间,而且还有记忆体共享等其他优势。当微控制器和通讯控制不要求单独记忆体时,设计者甚至可在降低系统成本的同时,在晶片上实现更多性能。
| 《图十四 FlexRay扮演车用网络骨干角色示意图 》 | 数据源:Freescale |
|
FlexRay扮演车用网路骨干角色示意图
将FlexRay控制器整合在MCU架构的另一个优势,是可在硬体或软体上分区设计,这使FlexRay能真正实现灵活性和可扩充性。汉翔AIDC的FlexRay系统实验室,正着重于如何考量ECU属性、功能及性能需求,让FlexRay汇流排在固定频宽内结合不同功能、性能及可靠度需求,使ECU能有效互联运作。考量FlexRay通讯介面控制器实务应用系统的普及程度,汉翔所建置的FlexRay实验室雏形环境,将运用FlexRay实体层,改善车电应用可靠度、分析模组以及系统测试等项目。2版,以及欧洲的ISO/IEC 15504软体程序改进以及能力评估模型(Software Process Improvement and Capability dEtermination;SPICE)、以及欧洲的汽车产业软体可靠度协会MISRA(Motor Industry Software Reliability Association)的程式撰写标准,汉翔AIDC已取得基本的CMMI V1.2 Level II资格,往后也将继续取得CMMI Level III及Level IV。
标准即将启动出发
FlexRay并非仅仅是一个通讯协议而已,FlexRay还定义了不同节点元件间的硬体和软体介面,以及汽车系统中的通讯过程格式和功能。藉由FlexRay标准,相关量测厂商和测试机构也提供可保证FlexRay车用系统设计和测试验证所需要的工具方案。
FlexRay是整合车用电子、系统与控制网路架构的革新设计,汽车电子产业除了缜密规划相关晶片方案外,多网路和异质网路之间的gateway联系设计也是重点,这也包括选择FlexRay的多拓墣形式、掌握网路上分散ECU节点内的软体工作排程(task scheduling)、所有节点的网管机制、以及网路节点侦测与管理等等。传统跨国车厂、Tier 1与Tier 2的车用系统与零件商、车用电子晶片厂商、系统开发商等,已经开始相互结盟,积极开发FlexRay车用汇流排网路解决方案,在FlexRay带动下,汽车电子产业也以崭新风貌连结启动准备上路!


