目前Microchip 的3.3V 70MIPS dsPIC33EP MC 系列是專門針對motor control所設計的MCU/DSP。以三相馬達控制為例,從基本的BLDC 六步方波到Sensorless FOC (PMSM永磁同步 or AC感應)皆可輕鬆應付。若強調車用及安全功能,5V 且具有ECC (error codes correction)的dsPIC33EV系列則為首選。而PIC32MK MC 系列及SAM E/S7x 300MHz Cortex M7系列則非常適合高階伺服馬達控制應用,如高速高精度的工具機台。以下介紹會以較常見的三相永磁馬達為主。
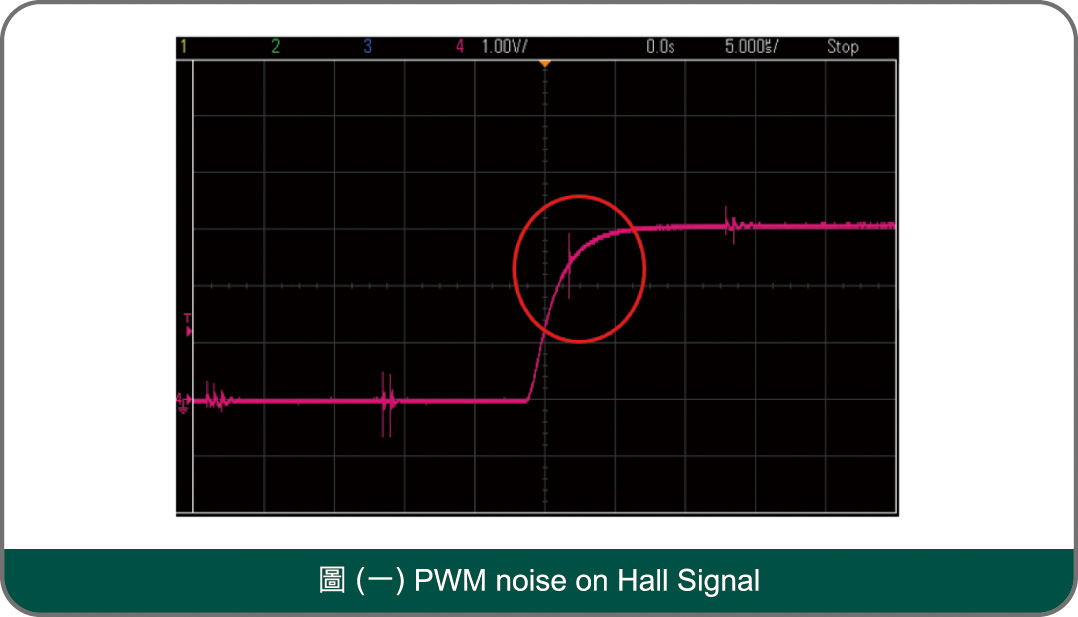
以控制法則來分,有BLDC六步方波驅動,可以是開迴路或是速度閉環或速度及電流閉環控制。若要輸出弦波有Sensorless FOC (Microchip Application notes AN1078, AN1292) 或開迴路弦波控制(AN1017)。若要輸出弦波電流,且馬達啟動時就有高負載,sensor-less FOC就比較不適合。此情形就必須在馬達加上Hall IC 或編碼器偵測馬達轉子位置,以便在馬達堵轉時也可輸出高扭力,例如e-bike, e-scooter等。一般來說都會使用Hall IC。但根據經驗,我們常遇到弦波控制時,Hall IC輸出容易受馬達動力線或PWM干擾,尤其是Hall 信號線常與motor UVW動力線做成同一條線時此情形更為常見,如圖(一)紅色圈所示,其中的noise會導致MCU多產生一次以上之Capture中斷,如果是以中斷讀取Hall 信號來計算速度,此情況便會造成速度計算突波。
...
...
| 使用者別 |
新聞閱讀限制 |
文章閱讀限制 |
出版品優惠 |
| 一般訪客 |
10則/每30天 |
5/則/每30天 |
付費下載 |
| VIP會員 |
無限制 |
20則/每30天 |
付費下載 |