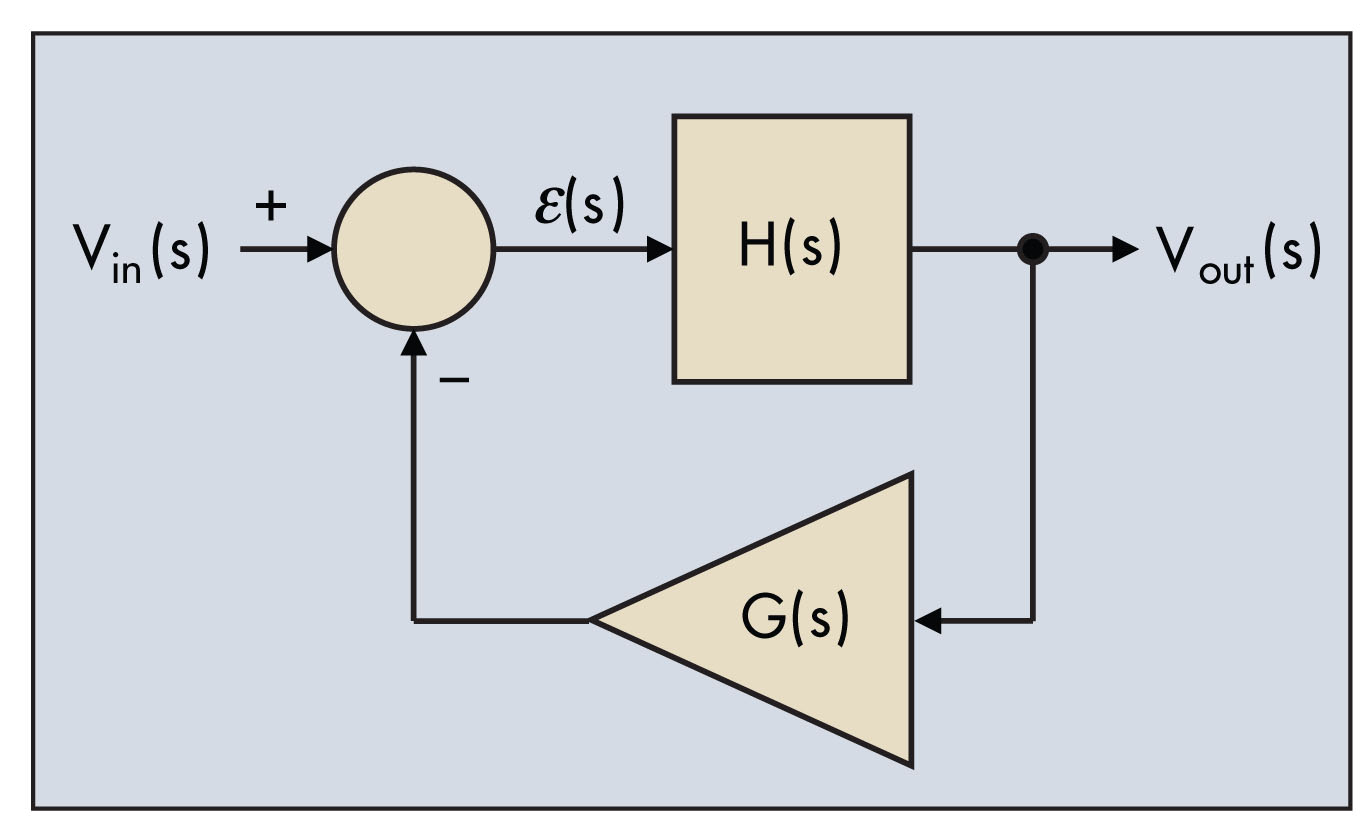
在電子領域,振盪器是一種能夠產生自激正弦訊號的電路。在多種多樣的配置中,振盪器的加速過程牽涉到採用振盪器的電子電路固有的雜訊。上電時雜訊等級上升,此時開始振盪及自激。此類電路可採用圖1所示的構成模組組成。如您所視,此配置看上去非常接近於我們控制系統的配置。
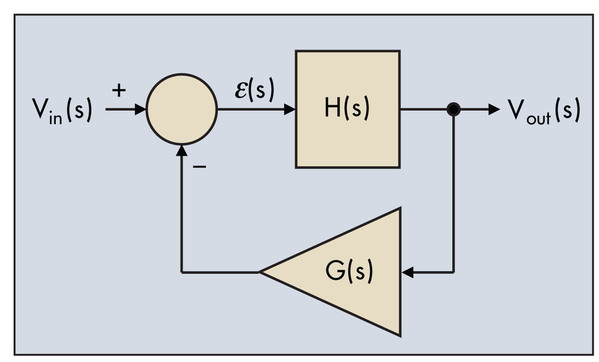
| 圖一 : 振盪器實質上是一種誤差訊號,不會妨礙輸出訊號變化的控制系統。 |
|
在我們的示例中,勵磁輸入並非雜訊,而是電壓電平Vin,它被注入為輸入變數以啟動振盪器。直接通道由傳遞函數H(s)構成,而返回通道包含G(s)區塊。
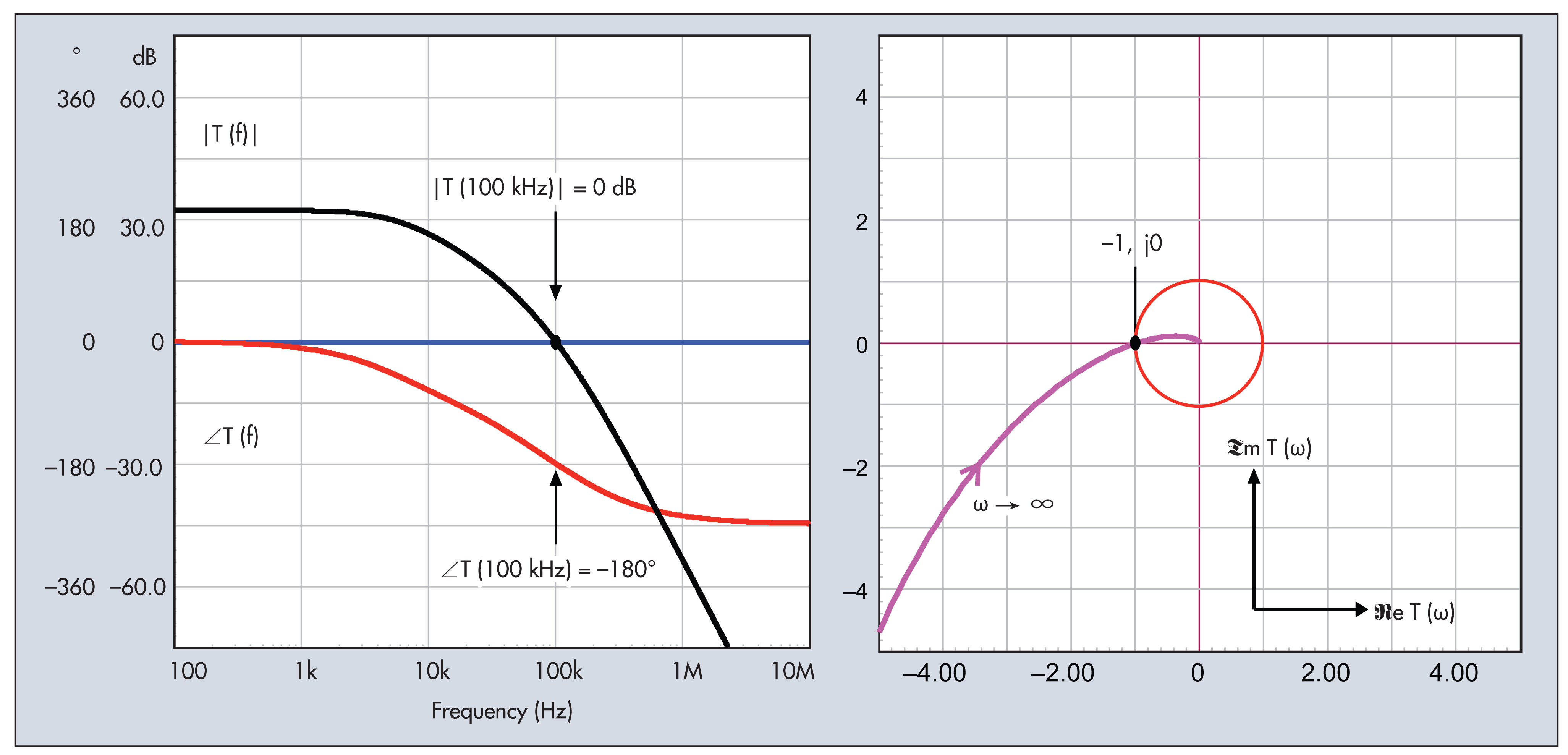
所謂的巴考森(Barkhausen)標準,由德國物理學家Barkhause在1921年提出。實際上講,在一個控制迴路系統中,它表示修正訊號不再抗拒輸出,而是相位形式返回,振幅恰好與勵磁訊號相同。公式(6)和(7) 在波德圖(Bode plot)中表示迴路增益曲線,此曲線穿過0dB軸,且恰好在此點受180°相位滯後影響。
在奈奎斯特分析中,迴路增益的虛數及實數部份相對頻率的變化關係被繪製成圖,此點對應於-1, j0。圖2顯示了滿足振盪條件的兩個曲線。如果系統略微偏離這些值(如溫度漂移、增益變化),輸出振盪要麼會以指數形式下降至0,要麼振幅發散,直到達到較高或較低的電源軌。在振盪器中,設計人員竭力盡可能多地降低增益餘量,使振盪條件在多種工作條件下都能滿足。
穩定條件
如您所知,控制系統的目標不是構建振盪器。我們希望控制系統提供高速、精確及無振盪的回應。因此,我們必須避開滿足振盪或發散條件的配置。一種方式是限制系統會作出反應的頻率範圍。
就定義而言,頻率範圍或頻寬,對應於從輸入到輸出之閉合迴路傳輸通道下降3dB的頻率。閉合迴路系統的頻寬能被視作頻率範圍,在此範圍內系統被認為會極佳地回應其輸入(即遵循設定點或有效地抑制擾動)。
我們在後文會看到,在設計階段,我們並不直接控制閉合迴路頻寬,但會控制交越頻率(crossover frequency) fc——這是一項跟開迴路分析有關的參數。這兩個變數通常被概略認為相等,但我們會看到這僅在一種條件下成立。然而,它們相差得也不太遠,在討論中這兩項能互換。
我們已經看到,開迴路增益是我們系統中的一項重要參數。當增益存在時(即|T(s)|>1),系統以動態閉合迴路工作,能補償輸入的擾動或對設定點變化作出反應。
然而,系統反應也存在限制:系統必須在擾動訊號所涉及的頻率提供增益。如果設定點變化的擾動太快,勵磁訊號的頻率成分就低於系統頻寬,表示這些頻率缺少增益:系統變慢且不會作出反應,工作狀態就像迴路對波形變化沒有回應。那麼,是否就要求無限大的頻寬呢?
不是的,因為增加頻寬就像是拓寬漏斗的直徑:您當然可以收集到更多訊息,並對輸入振動更快地作出反應,但系統也將接收到偽訊號(spurious signal),如轉換器在某些情況下自己產生的雜訊及寄生資料(如開關電源中的輸出漣波)。
因此,強制要求將頻寬限制在您應用真正要求的範圍。採用的頻寬太寬將削弱系統的抗雜訊性能(如其抑制外部寄生訊號的強固性)。
限制頻寬
我們怎樣限制控制系統的頻寬?方法就是透過補償器區塊G改變迴路增益曲線。此區塊將確保在一定量的頻率fc後,迴路增益的大小|T(fc)|下降至低於1或0 dB。如同我們所闡述的,一旦迴路閉合,它大致就是您的控制系統的頻寬。
發生此現象時的頻率稱作交越頻率,標作fc。這就是否足夠獲得強健的系統?不是的,我們需要確保另一個重要參數:幅值為1的點的相位T(s)必須低於-180°。從我們的實驗來看,我們已經看到當迴路增益在交越頻率處低於-180°時,我們獲得了朝穩態收斂的回應。這很明顯是我們控制系統極想要的一種特徵。
為了確保我們在交越時避開-180°,補償器G(s)必須在選定的交越頻率處訂製迴路幅角(argument)以構建相位餘量(phase margin, PM或φm)。相位餘量可以被視作一項設計或安全限制,確保在即使存在外部擾動或不可避免的生產差異範圍(production spread)的情況下,迴路增益的變化不會破壞穩定性。
我們在後文會看到,相位餘量還會影響系統的暫態回應。因此,相位餘量的選擇並不只是取決於穩定性考慮因素,還取決於您期望的暫態回應類型。
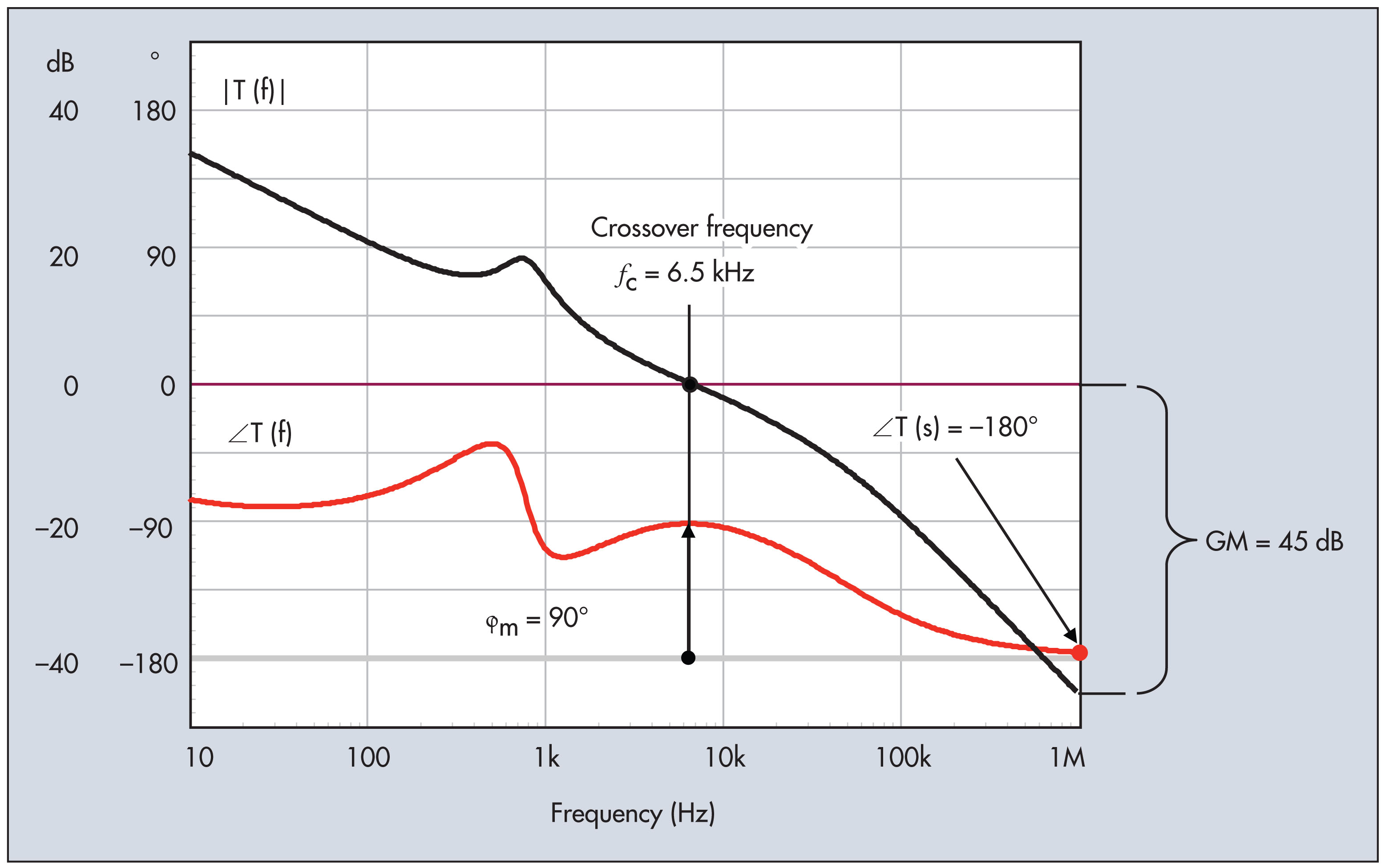
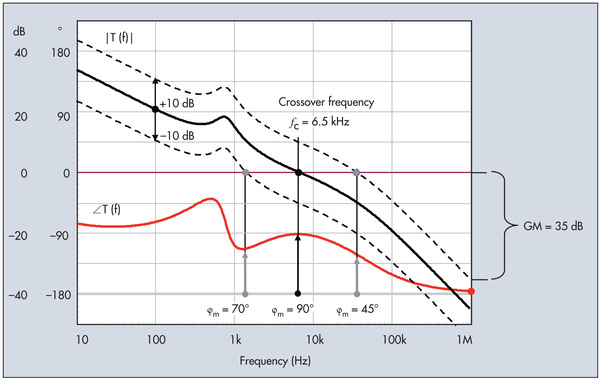
圖3中顯示了經典補償的典型迴路增益曲線,其中顯示交越頻率為6.5 kHz。在此點,T(s)相位為-90°。如果您想在6.5 kHz時從-180°起步,並正向清點相位度數直至穿越幅角波形,您在此例中就得到90°的相位餘量。
這就是一個極為強健的系統,被認為在各種條件下都穩定:即使在交越點附近迴路增益有一定程度的變化,也沒有可能在相位餘量太小的頻率交越。所謂的「太小」,我們指的是相位餘量接近30°極限,低於此值時系統就提供不可接受的振鈴(ringing)回應。這就是?什?您在上學時學習到45°是極限,此值相較於30°而言提供了額外的餘量。我們稍後會看到這些數字的來源分析。
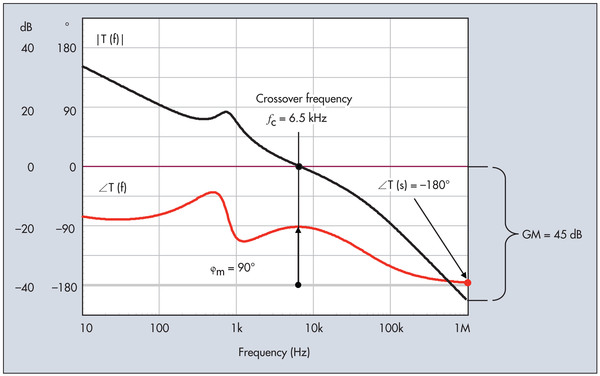
| 圖三 : 在此示例中,0dB交越點位於6.5kHz,此頻率時總相位滯後提供了90°的相位餘量 |
|
增益餘量及穩定條件
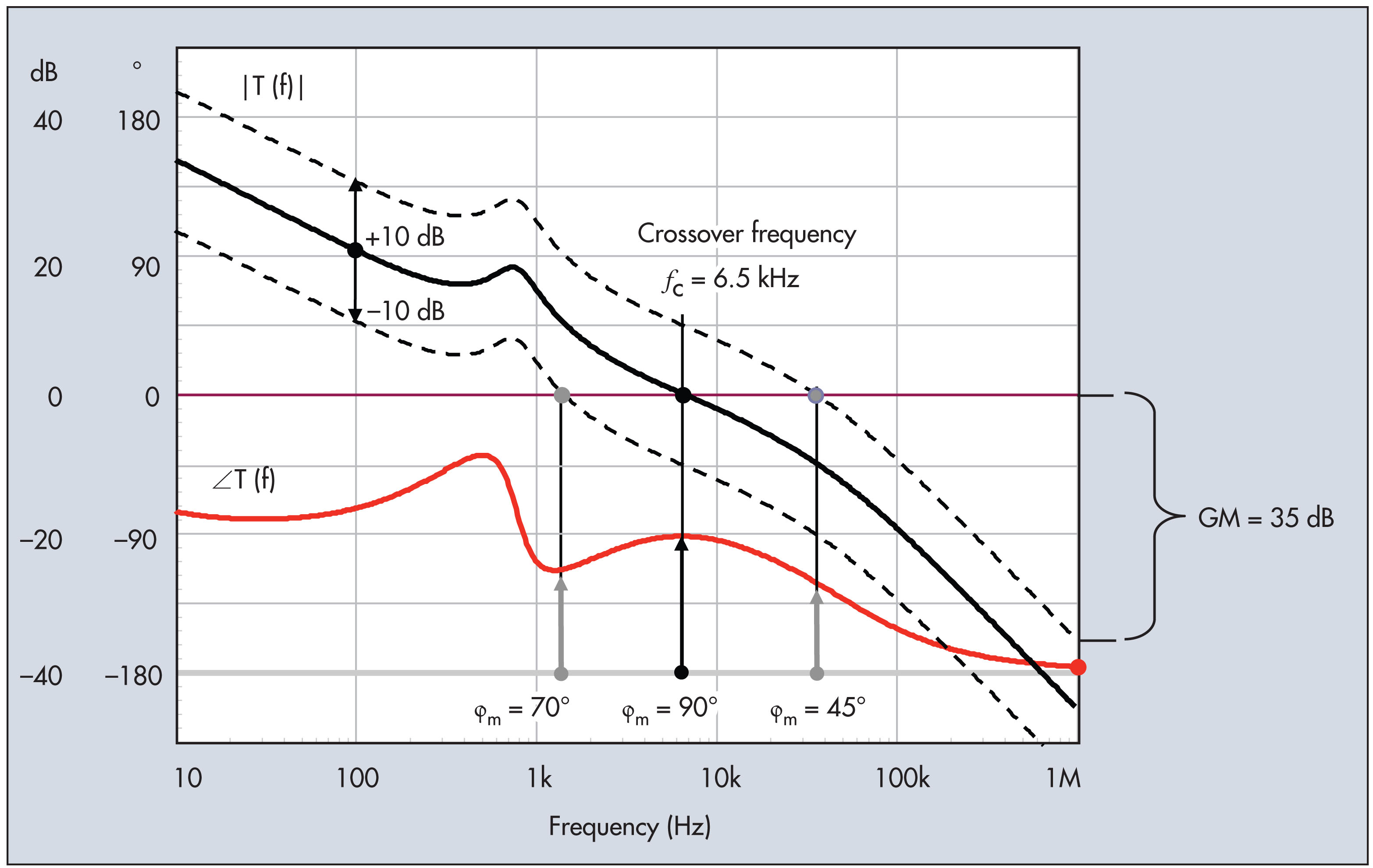
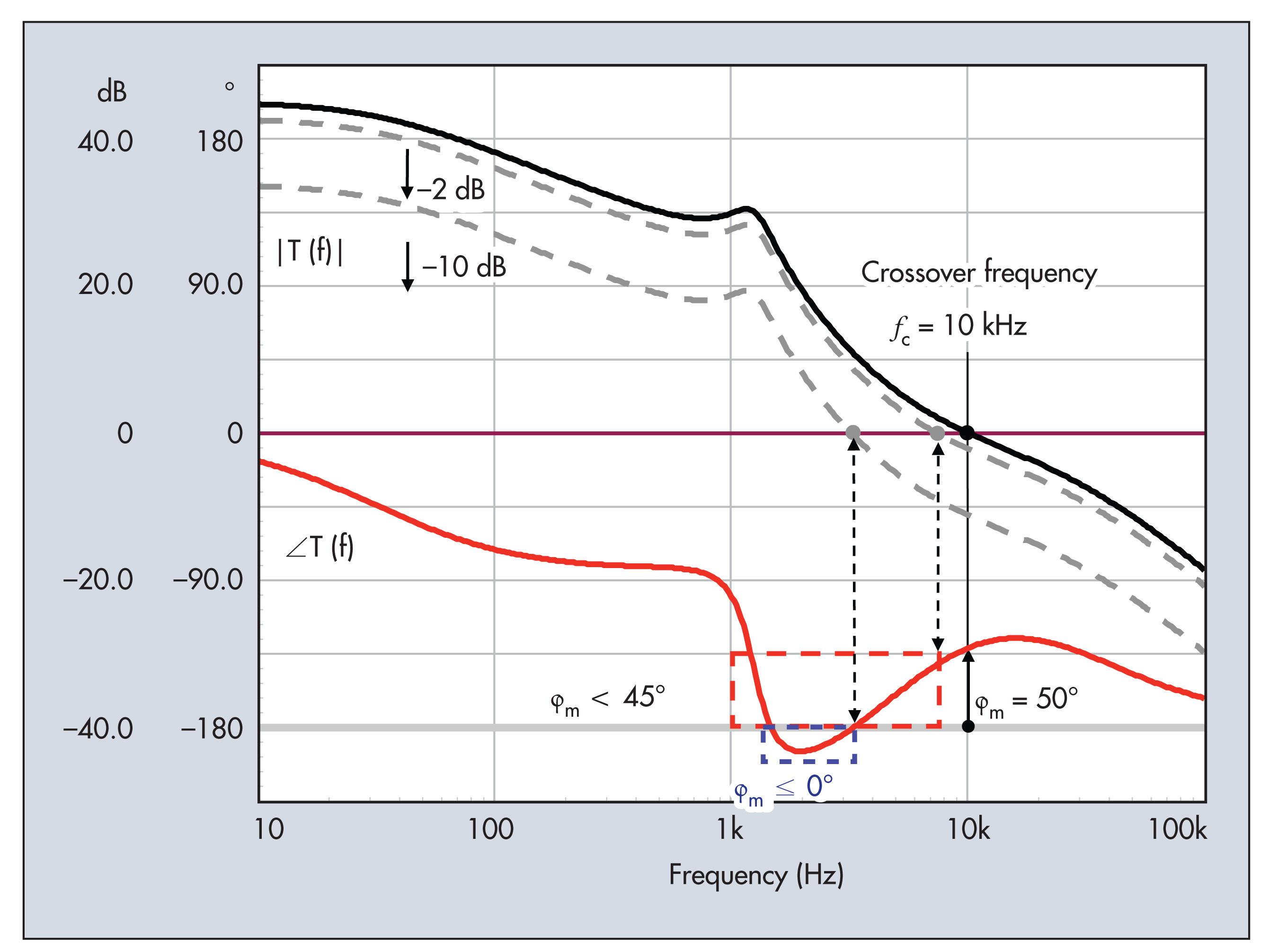
圖4顯示了被補償轉換器的另一個典型頻率回應,重點顯示了0dB交越點及相位餘量。我們根據經驗可知,構成轉換器的元件在產生生命週期內會再現性能變化。這些變化可能是因正常的生產差異範圍引起的(如電阻或電容遭受逐批次公差不同的影響)。轉換器的環境工作條件也對元件有影響。
在這些變數中,溫度充當關鍵角色,影響被動或主動元件參數,如電容或電感等效串列電阻(ESR)、光耦電流傳遞比(CTR)或是雙極電晶體的beta值。這些變數影響迴路增益,使其上升或下降,具體則取決於受影響的參數。
| 圖四 : 迴路增益會顯示出對溫度等外部參數的敏感性。出現變化時,相位餘量必須始終保持在安全限制範圍內。 |
|
如果增益曲線出現變化,0 dB交越頻率將過渡至新的值,為轉換器施加不同的頻寬。在這些變化條件下轉換器的穩定性會受到怎樣的影響?如果新的交越頻率出現在相位餘量較少的點,暫態回應性能可能下降,使過沖不再能被接受。因此,身為設計人員,你的責任就是確保這些差量(dispersion)在你接近-180°極限時不會突然增大增益。
圖4描繪了由於所選擇元件生產差異範圍導致的±10dB典型增益變化。它帶來了1.5kHz至30kHz的交越頻率。在此區域,相位餘量從70°變為45°,這些都是理論上的安全數字。最壞情況是什??就是新的交越頻率在總相位滯後180°處出現。這條件在1MHz時出來,表示有35dB的正增益變化。
不太可能有大增益
有利的是,當今電子電路中不太可能出現35 dB的增益變化。以前,在變壓器或伺服系統(servomechanism)採用真空管電路驅動的時候,上電序列期間的準備(warm-up)時間可能引起大的迴路增益變化。因此,增益規定有必要排斥可能存在穩定性風險的第二個點。
此總相位滯後達-180°的頻率處的迴路增益曲線上可見這增益餘量,在圖3中被標記為GM。在當今電子電路中,高於10dB的增益餘量通常就足夠了,除非您的迴路增益對外部參數極為敏感。
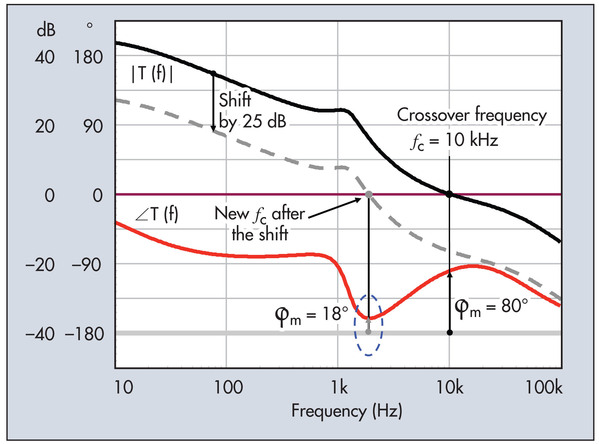
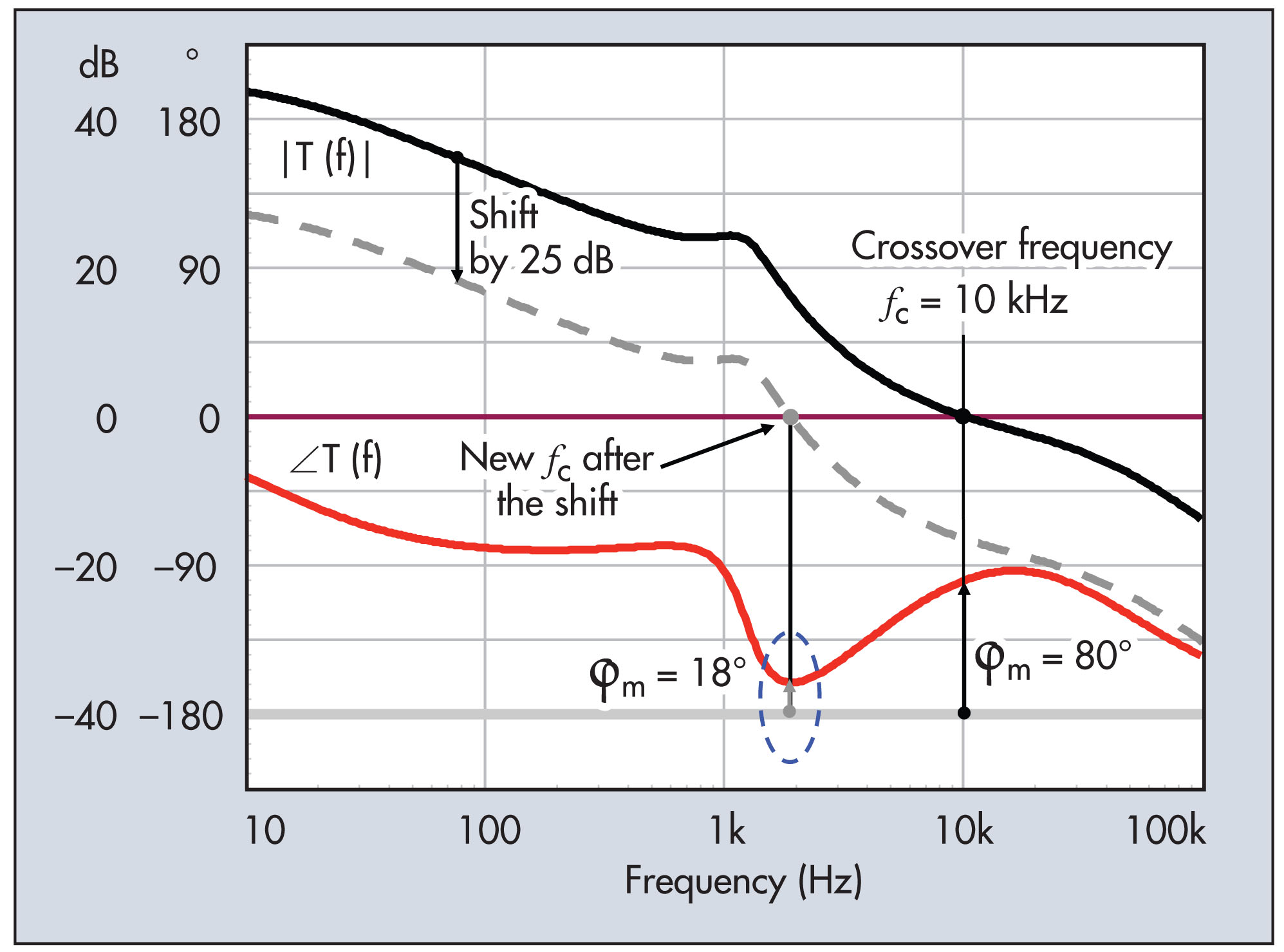
| 圖五 : 在此示例中,如果增益漂移至低於25dB,曲線就在相位餘量僅為18°的頻率點過0dB軸。如此的相位餘量將受大的過問影響,提供振盪極大的回應。這就是有條件穩定的案例。 |
|
增益漂移的另一個示例如圖5所示。圖中顯示另一個被補償的轉換器在10kHz時出現80°的相位餘量。根據前文的討論,我們知道可能會出現增益變化,致使增益曲線上揚或下走。在我們的示例中,我們可以發現2kHz附近一個區域的相位餘量小到只有18°。
如果出現20至25dB的增益下降,你最後得到的控制系統就會出現相當危險的約2kHz的低相位餘量。這就會導致振盪回應,很可能超出過沖規範。此類系統被認為是有條件穩定。有利的是,如前所述,25dB的增益變化並不常見,有這等增益餘量的系統可被視為強健。
然而,我看見過在一些設計案例中,最終使用者(您的客戶)在規範中清晰標明不接受有條件的設計,要求在低於交越頻率的所有點提供大於60°的相位餘量。在這種情況下,就強制要求補償轉換器,使得無論什?工作條件下,低於交越頻率時都不存在相位餘量降低的區域。
穩定,或是不穩定?
通常認為,在交越前相位下降至低於-180°的系統是不穩定的系統。這樣的回應如圖6所示。在1kHz后相位曲線快速下降,並在1.5kHz之後的數kHz範圍內越過-180°的極限。然後相位曲線又上揚,在10kHz時提供50°的相位餘量。是的,此系統很穩定,只不過是因為在0dB時我們不滿足公式(7)。
要記住的是,要消除公式(3)的分母,您必須使增益大小恰好等於1且相位滯後180°或更多。在圖中,我們可以看到任何點都不滿足此條件。然而,值得一提的是,此迴路極具條件相關性。如果增益減少數dB,您的相位餘量將變得低於45°。增益再下降10dB,您將進入相位餘量為0的危險區,這時會達到振盪條件。
(本文作者為安森美半導體產品工程總監)
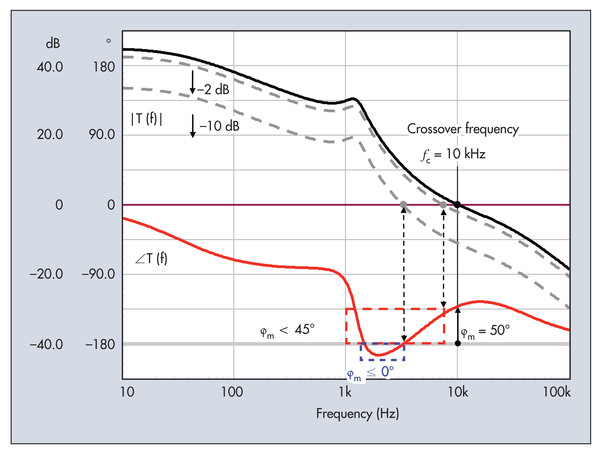
| 圖六 : 相位滯後180°,但處於增益大於的區域。這並不構成問題,其回應可以接受。 |
|
- 注:本文經出版商Artech House, Inc., Boston批准,節選自「線性及開關電源控制迴路設計教程」(c) 2012一書。此書的主題包括:迴路控制基礎、傳遞函數、控制系統的穩定條件、補償、以運算放大器為基礎的補償、以運算跨導放大器為基礎的補償、以TL431為基礎的補償、以為流穩壓器為基礎的補償、量測及設計實例。此書可以至ArtechHouse.com、Amazon.com或BN.com上購買。