在工廠中,機器手臂雖能夠高效且準確地完成指令,但並不能完全取代人工,且由於工業機器人「導入」成本高,雖購入價格不貴,但傳統工業機器人裝機部署上線成本非常高。
 |
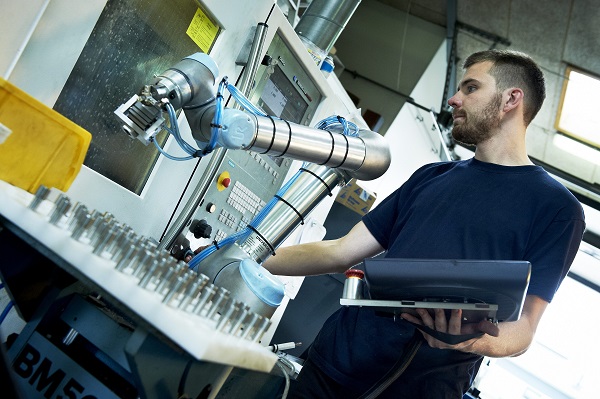
| 透過將感測器、智慧控制技術與軟體集成於機器人上,將能夠確保人和機器人間能夠無須圍欄安全合作。 |
由於傳統機器人學習曲線高、服務收費高且占地成本高的原因,再加上傳統工業機器人與台灣中小企業生產模式不同,傳統工業機器人的目標客戶為進行大規模生產的企業;而中小企業所生產的產品一般以客製化、小批量、短生產週期為主,因此人機協同的生產模式便相當適合台灣。
人機協同為由人類負責對視覺、觸覺、靈活性要求較高的生產步驟,而機器人則利用其快速、準確的特點負責重複性工作。不過由於傳統機器手臂不是以與人互動作為設計主軸,因此如何讓機器人能夠避免傷害人類,也是近年在研發機器手臂時持續努力的方向。
近年安全防護設計主要有使用圍籬及加裝感測器兩種方式。圍籬主要可分為實體與光柵兩種,實體圍籬以金屬製成隔板或隔網,阻絕人、物進入;另一種則是以紅外光作為光柵,一旦人員進入阻斷紅外線,則機器手臂就會自動停止。
感測器則可分為力道感測器及ToF(Time of Flight;飛時測距)兩種。近年快速竄起的協作型機器人就是內建此類感測器,當機器手臂與人體接觸時,處理器便會判斷碰觸力道強弱,減緩機器手臂速度,除了能夠直接和人類並肩工作而無需使用安全圍欄進行隔離,更有望填補全手動裝配生產線與全自動生產線之間的差距。
ToF則是透過雷射光發射出去,再由偵測器接收散射光去計算光子雙向飛行時間,進而推導發射點與物件之間的距離,過去主要多應用於消費性產品,目前也有廠商將其設計於機器手臂,依據兩者間距離調整手臂速度。
不同於過去以取代人力為主的生產模式,現在機器人更偏向於輔助工具,而一成不變的自動化和手動勞動間的界線也逐漸模糊,透過將感測器、智慧控制技術與軟體集成於機器人上,將能夠確保人和機器人間能夠無須圍欄安全合作。