在工厂中,机器手臂虽能够高效且准确地完成指令,但并不能完全取代人工,且由於工业机器人「导入」成本高,虽购入价格不贵,但传统工业机器人装机部署上线成本非常高。
 |
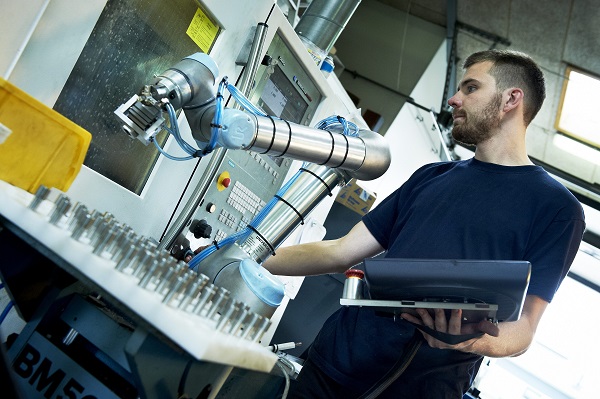
| 透过将感测器、智慧控制技术与软体集成於机器人上,将能够确保人和机器人间能够无须围栏安全合作。 |
由於传统机器人学习曲线高、服务收费高且占地成本高的原因,再加上传统工业机器人与台湾中小企业生产模式不同,传统工业机器人的目标客户为进行大规模生产的企业;而中小企业所生产的产品一般以客制化、小批量、短生产周期为主,因此人机协同的生产模式便相当适合台湾。
人机协同为由人类负责对视觉、触觉、灵活性要求较高的生产步骤,而机器人则利用其快速、准确的特点负责重复性工作。不过由於传统机器手臂不是以与人互动作为设计主轴,因此如何让机器人能够避免伤害人类,也是近年在研发机器手臂时持续努力的方向。
近年安全防护设计主要有使用围篱及加装感测器两种方式。围篱主要可分为实体与光栅两种,实体围篱以金属制成隔板或隔网,阻绝人、物进入;另一种则是以红外光作为光栅,一旦人员进入阻断红外线,则机器手臂就会自动停止。
感测器则可分为力道感测器及ToF(Time of Flight;飞时测距)两种。近年快速窜起的协作型机器人就是内建此类感测器,当机器手臂与人体接触时,处理器便会判断碰触力道强弱,减缓机器手臂速度,除了能够直接和人类并肩工作而无需使用安全围栏进行隔离,更有??填补全手动装配生产线与全自动生产线之间的差距。
ToF则是透过雷射光发射出去,再由侦测器接收散射光去计算光子双向飞行时间,进而推导发射点与物件之间的距离,过去主要多应用於消费性产品,目前也有厂商将其设计於机器手臂,依据两者间距离调整手臂速度。
不同於过去以取代人力为主的生产模式,现在机器人更偏向於辅助工具,而一成不变的自动化和手动劳动间的界线也逐渐模糊,透过将感测器、智慧控制技术与软体集成於机器人上,将能够确保人和机器人间能够无须围栏安全合作。