本文探討可用於量測光電(electro-optic)感測器性能的不同掃描模式和方法。感測器解析度、失真、視野(FOV)大小、最小可解析對比度和最小可解析溫度(在紅外攝影機的情況下)的量測,都是通過這些性能指標測試的範例。
使用自動運動系統執行掃描測試可以得到許多感測器的性能數據,可用於開發和生產測試。建立生產線感測器適用規格,使用準確的系統自動進行pass/fail測試,同時比較基準及性能趨勢,可用於發現品質與製造問題。 這些自動化測試甚至可以通過使用即時量測的光電圖像數據來校正光學誤差,從而提高感測器的一致性和準確性。
單點目標掃描
光電成像系統最簡單、最有效的測試之一,為通過感測器視野(FOV)均勻移動高對比度目標,並在每個位置收集視覺位置與感測器圖像數據。 該過程首先通過感測器 FOV 在既定的模式(通常是正方形、矩形、圓形或十字準線)上編程點對點步驟。在每個測試點,從光電感測器和視覺運動編碼器位置同時捕獲數據。階梯圖案可以是方形或矩形光柵掃描、角落掃描或以 FOV 為中心的均勻圓形掃描。
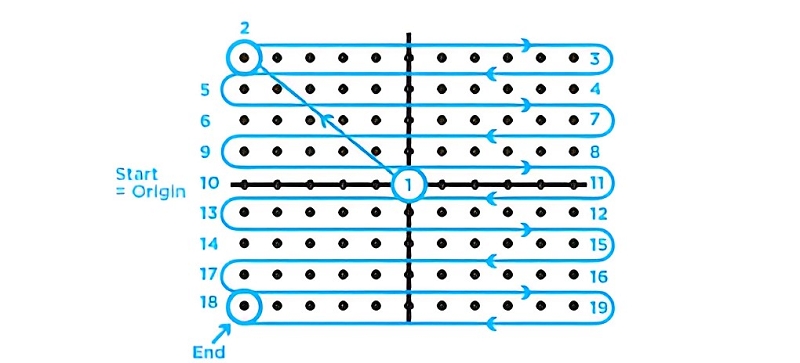
圖一顯示單向光柵掃描模式的範例。當需要最高精度時,此掃描模式通常用於執行光電感測器校準。 使用單向掃描方法消除了運動系統遲滯(hysteresis)和量測背隙(backlash)。這種掃描方法的一個缺點是校正和量測時間較長。
圖二顯示雙向光柵掃描模式的示例。當產能為關鍵時,通常會使用這種掃描模式,因為測試時間會被最小化。此外,如果此用感測器的解析度低於運動系統遲滯和背隙,則此模式是一種很好的測試方法。這種方法的一個潛在缺點是運動系統的遲滯和背隙會降低整體精度。
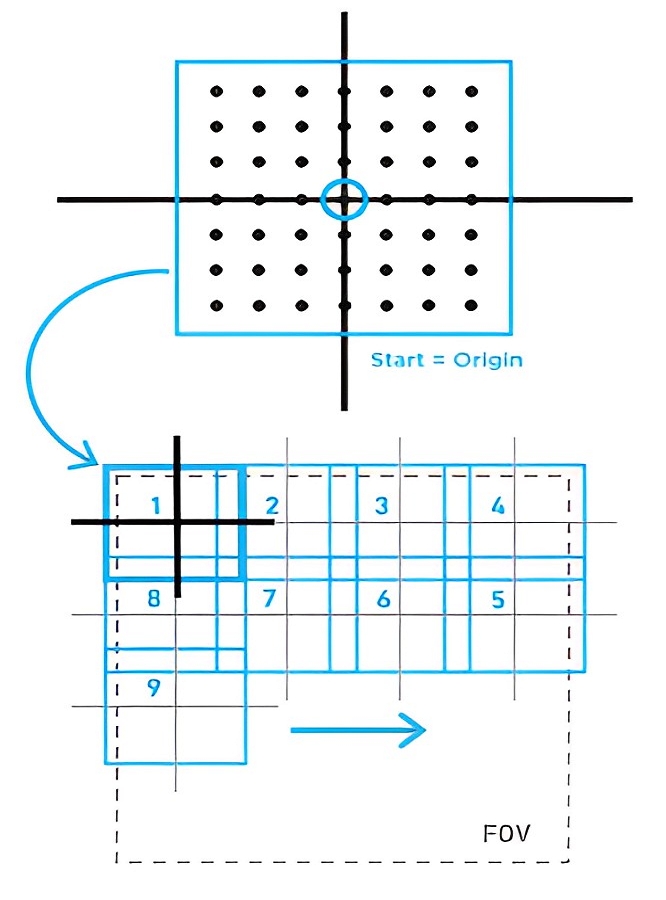
圖三顯示包含角落量測的光柵掃描模式示例。這種掃描模式有利於快速定位圖像中心,檢查圖像偏斜度並顯示感測器與成像器光學對準的扭曲和對稱性,這有助於識別組裝錯誤。對於EO感測器安裝在雲台(gimbal)上的應用,此掃描模式可用於量測光電感測器與雲台運動軸的正交性。在機械設置或軟體中執行該對齊錯誤的校正。
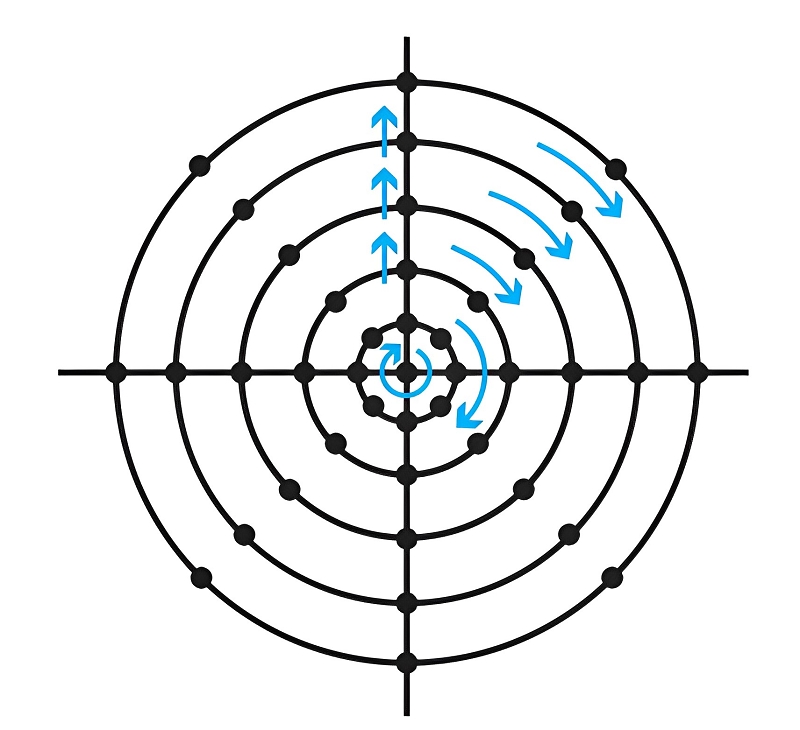
圖四顯示使用同心圓和 45° 增量量測點的圓形掃描示例。圓形掃描路徑經常用於在初始組裝期間量測光學望遠鏡的鏡頭對準。該測試通常在溫控腔中重複進行,以確定對感測器在運行中所暴露的溫度範圍的對準靈敏度。
最後,這種掃描模式可用於雷射點功率分佈量測,並有助於辨識由設計或製造問題引起的局部熱點或功率空洞。緊密的螺旋掃描模式也可以獲得類似於同心圓掃描的量測結果。
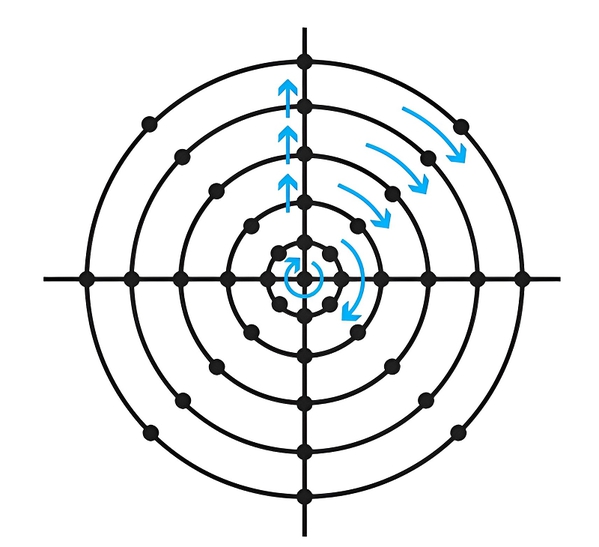
| 圖四 : 具有同心圓和以 45° 增量定位的量測點的圓形掃描圖案。 |
|
所有上述掃描模式都可用於量測鏡頭變形誤差。在每個掃描模式開始時,運動系統將目標對準FOV 的中心,XY像素位置和運動編碼器位置被設定為中心參考點。整個掃描完成後,將運動編碼器位置與被測單元(UUT)感測到的目標XY像素位置進行比較,以確定鏡頭變形誤差。可以從該數據生成感測器校正表。然後通過編程的掃描模式重新運行運動系統,並在軟體中加載校正文件,從而驗證該錯誤是否存在。
解析度目標或陣列目標掃描
代替單點目標掃描,二維解析度目標或目標基準掃描陣列,用於在每個運動步驟覆蓋更大的 FOV 區域。 這種方法通過在光電感測器中瞬時記錄目標 XY 像素位置的二維陣列來增加單個運動步驟的圖像目標量測位置,它還減少了整個 FOV 的運動步數。圖五顯示這種二維區域光柵掃描方法的示例。
這種方法的優點之一是減少了量測時間。然而,後處理稍微複雜一些,因為它需要拼接圖像和組合數據。
先前在圖一至圖四中說明的相同掃描方法可以與這種重疊區域方法一起使用。該技術適用於校正非常大的 FOV 感測器,例如衛星成像器。這也是一種很好的掃描方法,可以使用安裝在雲台上具有窄 FOV 的高解析度感測器來量測大面積區域。通過在系統中添加圖像處理,重疊掃描也可用於在雲台的視野中定位新的或變化的物體。
動態感測器測試
感測器動態和圖像處理性能可以通過在視野中以恆定或變化的速率移動物體來測試,測試對象通常是一個小的垂直條或薄板,它們會在均勻的背景和感測器之間通過,這種狀況有時被稱為「狹縫測試」。根據掃描頻率、目標尺寸和掃描長度,可以使用各種運動裝置,例如旋轉和線性平台,可以通過增加運動速度,直到狹縫不再可見,用來測試感測器成像頻寬和瞬時成像解析度。
可以使用之前顯示的相同運動掃描配置文件,但不是在每個量測位置停止,而是使用UUT和運動系統之間的緊密同步時捕獲數據。由於運動系統和感測器的動態特性,量測精度可能會略低。然而,主要優點是更快的測試時間和更高的產能。
動態測試的數據收集
確保量測數據與量測位置精確匹配在高解析度動態測試中可能具有挑戰性,更快的掃描速率有利於更高的產能,但UUT數據與運動數據的緊密位置同步是必要的。
一些高階運動控制器具有內置的低延遲觸發功能,可用於實現這種緊密同步。Aerotech運動控制器包括一個以位置為基礎的低延遲輸出觸發信號,稱為「位置同步輸出(PSO)」。 PSO允許用戶指定三維空間中的向量距離以觸發數據收集,可以根據命令距離或實際位置回饋觸發輸出,進一步提高同步確實度。
使用PSO等內置控制器功能,無需購買昂貴的高速硬體數據採集系統或開發定製的數據採集軟體。
總結
在本文中,討論了各種運動掃描技術的優缺點,使用這些掃描技術及相關的測試設置和驅動技術,將使得光電測試工程師能夠就有效的測試策略做出更明智的決策。
(本文作者Tom Markel為Aerotech航空太空策略客戶經理)