本文叙述以模型为基础的设计来进行无人自主停车技术开发,以联结车为例说明,如何采用开发有效率的路径规划与控制演算法,并且在真正的卡车上进行验证,而达成所设定的目标与主要的性能指标。
即使是身经百战的驾驶,要停好一辆由卡车和拖车组合而成的联结车,仍然是一件非常具有挑战性的任务。引导拖车到达一个装卸码头通常需要几次的操控,而行驶在挤满行人的狭窄城市的街道,驾驶面对的挑战更是艰巨(图1)。

| 图1 : 行驶在一个代表着装卸码头情境的测试轨道上的卡车-拖车联结车(上),以及城市环境(下)。 |
|
为了协助驾驶进行卡车-拖车联结车的停车,Ford Otosan的团队开发了一个无人自主停车系统的概念验证原型。
此原型使用两个路径(trajectory)规划演算法:
一、人工势场(artificial potential field)演算法:这是与萨里大学(University of Surrey)进行EU TrustVehicle专案合作时的一部份开发项目。
二、RRT*演算法(此为快速搜索随机树,rapidly exploring random tree或RRT的变种):此由Ford Otosan内部的团队开发。利用Simulink来完成演算法的建模和模拟,随后透过Simulink的产品家族产品进行硬体回圈(hardware-in-the-loop)测试来进行验证。接着,藉由在真正的卡车上进行测试,发现这个系统原型只需更少的操控就可以把车停好,而且只需花费资深驾驶者的一半时间。
建立卡车-拖车联结车模型与路径演算法
开发团队已经有开发客车自动驾驶系统和机器人控制系统的经验,但是从来没有经手过像是卡车-拖车联结车这种规模的车辆。除此之外,卡车与拖车是相连的,增加了控制设计的复杂度。
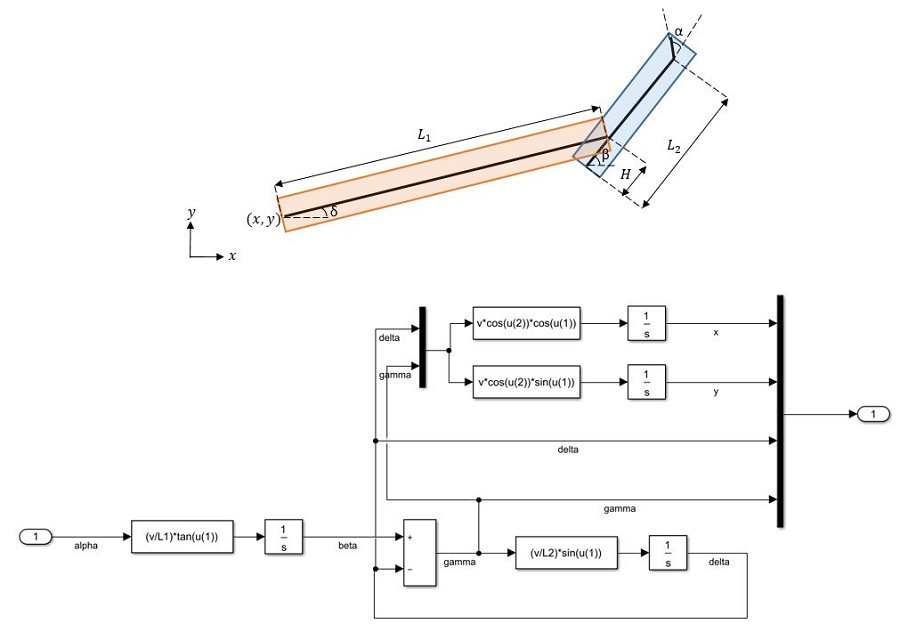
不过,因为使用以模型为基础的设计(Model-Based Design),可以建立卡车的动态模型、将动态视觉化,并且在开发与调整路径规划和控制演算法时,将卡车动态纳入考量(图2)。
以3DOF自行车模型为基础,建立一个简单的车辆动态模型,用来表示纵向(longitudinal)、侧向(lateral)及偏航(yaw)的运动,并使用实际量测的参数值来建构此模型,比如卡车轮胎的质量。
透过将控制设计切割为几个单独的Simulink元件,让不同的团队可以独立作业。举例来说,一个团队负责处理路径规划元件(实现RTT*或人工势场演算法)。另一个团队处理路径控制元件,他们计算行进的角度、煞车扭矩、产生期望的偏航率所需要的加速扭矩,以及由路径规划元件提供的减速和加速;该团队一开始是将路径控制元件作为单纯的追踪控制器来实现,不过在之后重新以模型预测控制器实现,以符合更高的速度要求。
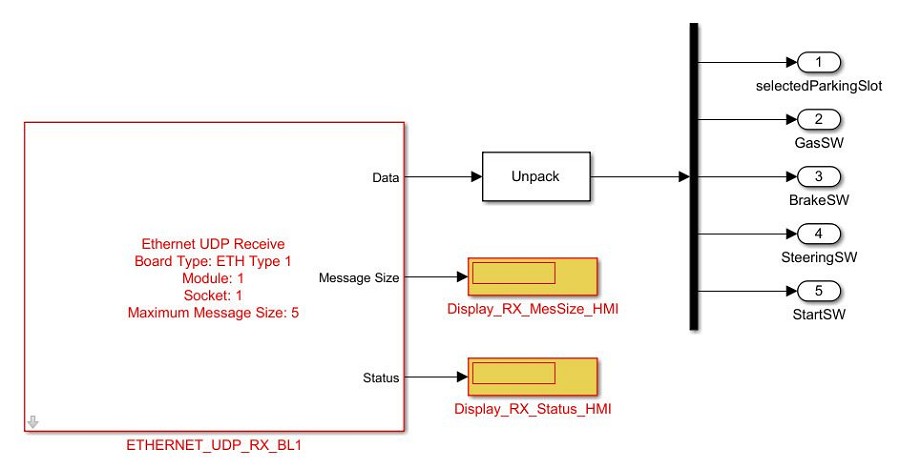
此外,还有一个元件负责实现感知子系统的介面,它使用光达和雷达来定位车辆附近的障碍物和建筑物。其他元件则实现了执行在Android?平板电脑上的监控app介面、卡车的CAN汇流排、以及软体回圈(software-in-the-loop;SIL)和硬体回圈(hardware-in-the-loop;HIL)测试环境(图3)。
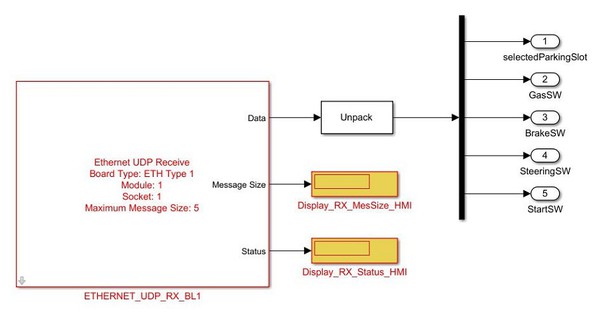
| 图3 : HMI应用之UDP介面的Simulink模型。 |
|
SIL、HIL及实车测试
在Simulink执行初步的验证模拟之后,在SIL和HIL环境执行更大规模的测试。先使用Simulink Coder(Simulink-C转码器)从路径规划与路径控制模型产生程式码,并且执行包含了模拟的感测器输入值、一个卡车与拖车动态模型,以及一个环境模型的SIL测试。
在HIL测试,将路径规划与控制演算法部署到dSPACE目标硬体上,这些测试能够在实际于卡车上进行测试之前,先验证如透过CAN和UDP的即时通讯等设计即时表现。
实车测试是在土耳其埃斯基谢希尔(Eskisehir)的Ford Otosan Inonu测试轨道进行。将执行从Simulink产生程式码的dSPACE系统安装在卡车上(图4)。在最初的几次测试,可发现卡车的物理模型当中,出现特定参数不正确的数值,包含转向刚性。
当把这些数值以更加精确的量测值替换,并重新调整控制器,模拟和量测的结果变得非常接近,系统的整体表现带来极大的改善(图5)。
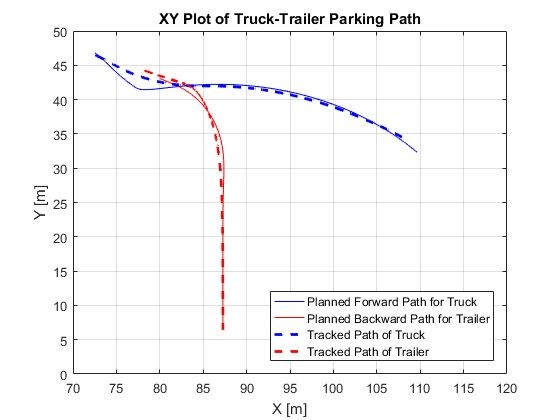
| 图5 : 定位、偏航率和侧向加速的模拟和量测结果比较。 |
|
实际上,在原本猜测需要至少两到三次操控的情况,卡车仅以单一次的操控就自行停好了;虽然模拟结果显示这样的可能性,不过相比于那些具有15到20年经验的资深驾驶者,演算法能够更有效率地操控卡车。
整合计画
透过开发有效率的路径规划与控制演算法,并且在真正的卡车上进行验证,而达成了专案所有的目标与主要的性能指标。现在让内部的专家将无人自主驾驶模式的联结车停好。
在Ford Otosan还有其他几项利用这项停车功能的新计画正在进行,包含设备管理的专案,以及专攻于卡车远距控制的项目;未来自主停车系统将整合至这些大型的生产系统。
(本文由钛思科技提供;作者Eren Aydemir、Ersun Sozen任职于Ford Otosan公司)