基於無感測器磁場導向控制(FOC)永磁同步馬達(PMSM)的先進馬達控制系統的快速普及,這種現象的背後有兩個主要驅動因素:為提高能效及加強產品的差異化。雖然有證據顯示採用無感測器FOC的PMSM可以實現這兩個目標,但需要一個可提供整體實現方法的設計生態系統才能取得成功。有了整體的生態系統,設計人員才能夠克服在系統設計過程中的各種挑戰。
為什麼選擇PMSM?
PMSM馬達是一種使用電子整流的無刷馬達。它經常與無刷直流馬達(BLDC)混淆,後者是無刷馬達系列的另一個成員,也使用電子整流,但在結構上略有不同。PMSM的結構可針對FOC進行優化,而BLDC馬達經過優化後可使用6步整流技術。經過優化後的PMSM可獲得正弦波反電動勢(Back-EMF),而BLDC馬達則獲得梯形波反電動勢。
這些馬達各自使用的轉子位置感測器也不同。PMSM通常使用一個位置編碼器進行操作,而BLDC馬達則使用三個霍爾感測器(Hall sensors)進行操作。如果考慮到成本,設計人員可以考慮實施無感測器技術,以省去磁體、感測器、連接器和接線的成本。去除了感測器還有助於提高可靠性,因為這可以減少系統中可能故障元件的數量。當比較無感測器PMSM和無感測器BLDC時,使用FOC演算法的無感測器PMSM可在使用類似硬體設計以及接近成本下提供更出色的性能。
轉移使用PMSM的最大受益者是那些目前正在使用有刷直流(BDC)或交流感應馬達(ACIM)的應用。主要優點包括具有更低的功耗、更高的速度、更平穩的轉矩、更低的可聞噪音、更長的使用壽命和更小巧的尺寸,從而使應用更具競爭力。但是,要想實現使用PMSM的這些好處,開發人員必須採用更複雜的FOC控制技術以及其他應用特定演算法,才能滿足系統需求。雖然PMSM比BDC或ACIM的成本更加昂貴,但它具有更多優勢。
實作上的挑戰
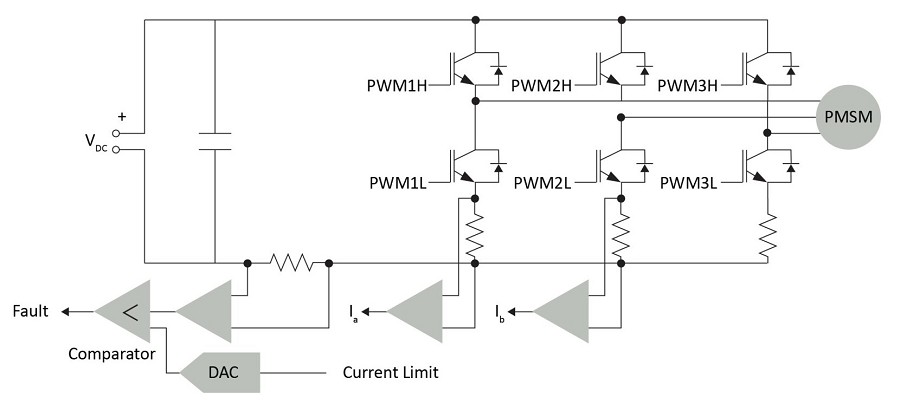
但是,要實現使用PMSM的優勢,必須瞭解實現先進FOC馬達控制技術時固有的硬體複雜性,同時還需要掌握這一領域的專業知識。圖1給出了使用三相電壓源逆變器(inverter)的三相無感測器PMSM控制系統。控制逆變器需要三對相互關聯的高解析度PWM訊號,以及大量需要訊號調整的類比回饋訊號。此系統還需要硬體保護功能來實現容錯,同時利用高速類比比較器實現快速回應。這些實現感測、控制和保護所需的額外類比元件增加了解決方案的成本,而典型的BDC馬達設計或簡單的ACIM每赫茲電壓(V/F)控制並不需要這些元件。
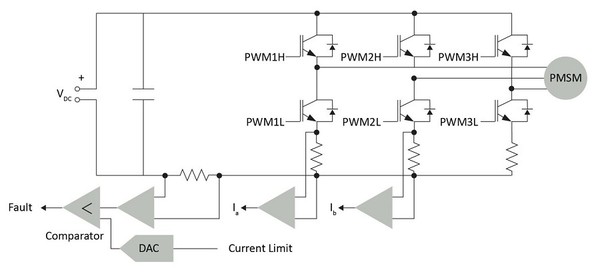
| 圖1 : 使用三相電壓源逆變器的三相無感測器PMSM控制系統 |
|
此外,還有為PMSM馬達控制應用定義元件規格和進行驗證所需的開發時間。 要應對這些挑戰,設計人員可以選擇一款合適的微控制器,以實現與專為PMSM馬達控制客製化元件規格的高度類比整合。這將會減少所需的外部元件數量並優化物料清單(BOM)。高度整合的馬達控制元件現已具有高解析度PWM,可簡化先進控制演算法、用於精密測量和訊號調整的高速類比周邊、功能安全所需的硬體周逼,以及用於通訊和除錯的序列介面的實現。
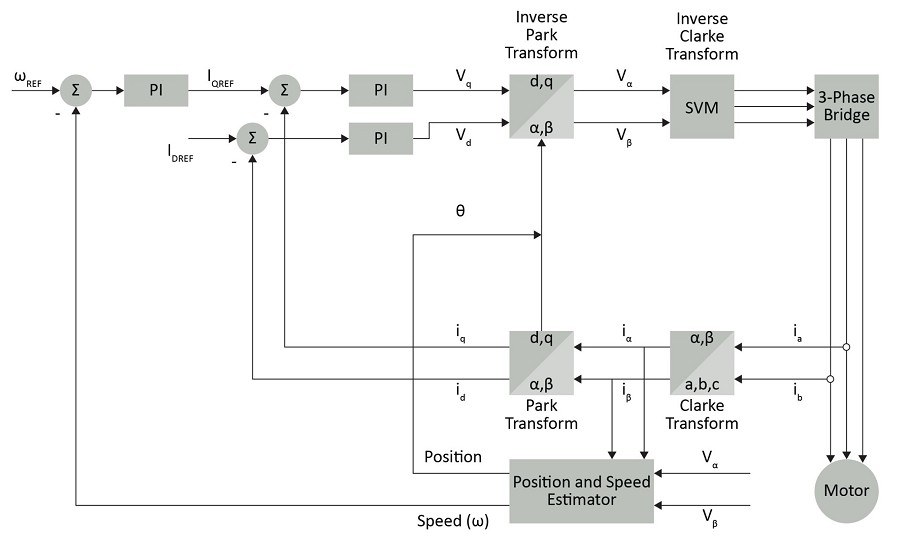
此外,還有一個較大的挑戰,即馬達控制軟體與馬達機電行為之間的互動。圖2顯示出標準的無感測器FOC方塊圖。要將其從概念轉變為實際的設計,必須瞭解控制器架構和數位訊號處理器(DSP)指令,以實現需要快速大量計算的控制環。
為實現可靠的效能,控制環必須在一個PWM週期內執行。必須對控制環的時間進行優化,具體包括以下三個原因:
1. 限制:使用不低於20 kHz的PWM交換頻率(時長為50 μs),以抑制來自逆變器切換的雜訊。
2.為實現頻寬更高的控制系統,控制環必須在一個PWM週期內執行。
3.為支援其他幕後所需的工作(如系統監視、應用特定功能和通訊),控制環必須以更快的速度運行。因此,FOC演算法的目標應該是在10 μs以內執行完成。
許多製造商提供了FOC示範軟體是利用無感測器估算器來估算轉子位置。但是,在使馬達開始轉動之前,FOC演算法必須配置各種參數以匹配馬達和硬體。必須對控制參數和係數進行進一步優化,以滿足所需的速度和效率目標。這時可以結合以下方法實現這一目標:
1. 使用馬達資料表獲得參數;
2. 反復進行試驗。
馬達資料表並不能始終提供準確的馬達參數,或設計人員無法獲得高精度測量設備,在這種情況下,開發人員將不得不借助反復試驗的方法。這種手動調整的過程需要時間和經驗。
PMSM馬達用於許多不同的應用,運行在不同的環境中,或者存在不同的設計限制。例如,在汽車散熱器風扇中,當馬達即將啟動時,由於風的作用,風扇葉片有可能向相反的方向自由旋轉。
在這種情況下,啟動採用無感測器演算法的PMSM馬達是一個挑戰,而且有可能損壞逆變器。一種解決方案是檢測旋轉方向和轉子位置,並利用這些資訊在啟動馬達前主動煞住馬達令其減速至靜止狀態。同樣,還可能有必要實施附加演算法,如每安培最大轉矩(MTPA)、轉矩補償和磁場弱化等。這些類型的應用特定附加演算法對於開發實用解決方案必不可少,但它們也會延長開發時間並使軟體驗證複雜化,進而增加設計複雜程度。
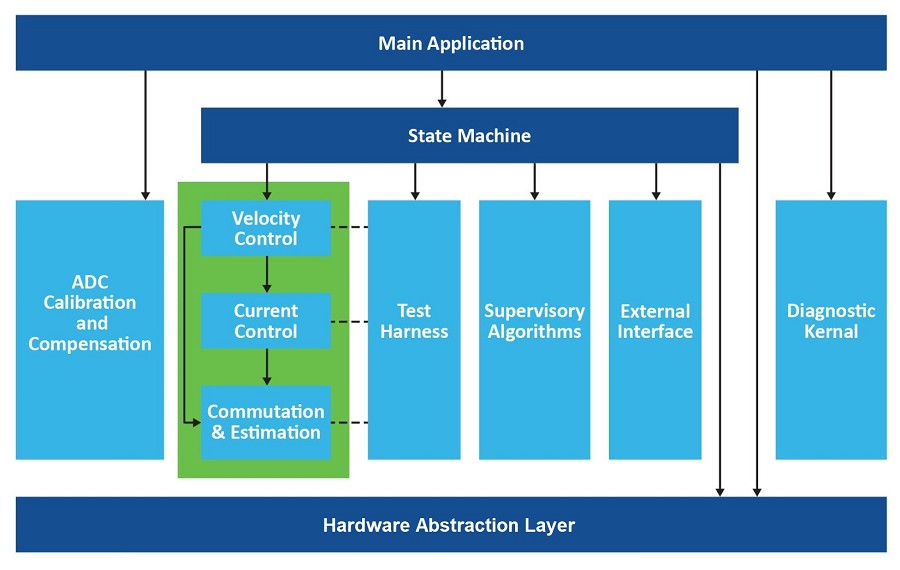
降低複雜程度的一種解決方案是,設計人員創建一個模組化軟體架構,這種架構可將應用特定演算法添加到FOC演算法中,同時不影響時效要求。圖3顯示出典型的即時馬達控制應用程式的軟體架構。此框架的核心是FOC函數,該函數提供了嚴格的時脈要求和許多應用特定的附加功能。框架內的狀態機將這些控制功能與主應用程式連接起來。這種架構在軟體函數塊之間必須要有一個定義明確的介面,以使其實現模組化並簡化程式維護工作。模組化框架支援不同應用特定演算法與其他系統監視、保護和功能安全程式的整合。
模組化架構的另一個好處是將周邊介面層(或硬體抽象層)從馬達控制軟體中分離出來,這便於設計人員在應用功能和效能需求發生變化時,將其IP從一個馬達控制器無縫遷移到另一個馬達控制器。
完整生態系統的需求
應對這些挑戰需要一個為無感測器FOC量身打造的馬達控制生態系統。馬達控制器、硬體、軟體和開發環境應協同工作,以簡化實現先進馬達控制演算法的過程。 為實現這一目標,此生態系統應具有以下特性:
1.一種用於自動執行馬達參數測量、設計控制環和產生原始程式碼的先進工具,可讓沒有這方面專業領域知識的設計人員能夠實現FOC馬達控制,可減少撰寫複雜程式碼的時程和縮短非常耗時的除錯及驗證程序。
2.適用於FOC和不同應用特定附加演算法的應用框架,用於縮短開發和測試時間
3.具有確定性回應的馬達控制器以及可在單晶片中實現訊號調整和系統保護的整合類比周邊,用於降低解決方案總成本
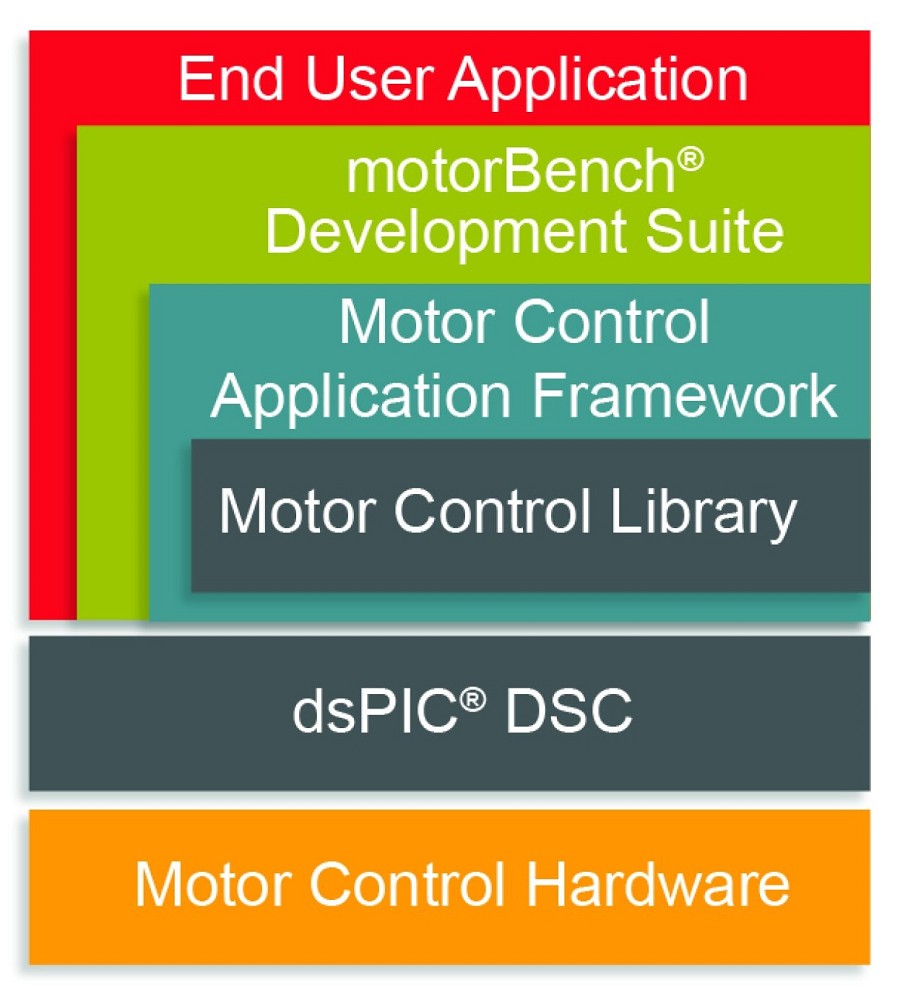
圖4顯示出一個馬達控制生態系統架構的範例,其中包括應用框架和一個用於高效能dsPIC33馬達控制數位訊號控制器(DSC)的開發套件。此開發套件在基於GUI的FOC軟體發展工具的基礎上構建,可以測量關鍵的馬達參數並自動調整回饋控制增益。
此外,它還可為利用馬達控制應用框架(MCAF)在開發環境中創建的專案生成所需的原始程式碼。解決方案協議堆疊的核心是馬達控制庫,這種庫可以實現應用程式的時效型控制環功能,並與dsPIC33 DSC的馬達控制周邊互動。此GUI可與多個可用的馬達控制開發板配合使用,支援馬達參數提取並為各種低壓和高壓馬達產生FOC程式碼。
對高能效和產品差異化的需求推動了朝向無刷馬達的轉變。全面的馬達控制生態系統可提供一種整體方法來簡化基於PMSM的無感測器FOC的實現,這種方法應包含專用的馬達控制器、快速原型開發板和可自動產生程式碼的易用FOC開發軟體。
(本文作者Nelson Alexander為Microchip資深行銷工程師)
參考資料
[1] TB3220-利用角度跟蹤鎖相環估算器實現面向家用電器的永磁同步馬達(表面貼裝和內建)的無感測器磁場導向控制
http://www.microchip.com.cn/newcommunity//Uploads/202003/5e65d169337d8.pdf
[2] motorBench開發套件
https://www.microchip.com/design-centers/motor-control-and-drive/motorbench-development-auto-tuning
[3] 馬達控制設計資源
https://www.microchip.com/design-centers/motor-control-and-drive
[4] 馬達控制庫
https://www.microchip.com/design-centers/motor-control-and-drive/motor-control-library