車用電子介面的特殊性
近年來車用電子成為電子工程的新應用焦點,然而車用電子迥異於消費性電子,亦不同於資訊電子,幾乎可說是一個全然獨立的領域。其原因無他,因為車用電子高度講究安全性,必須能通過各類型的耐受實證,且必須能長期供貨,一部汽車的壽命若是20年,其零組件就必須隨之供貨20年,這可不像消費性電子,從上市到停產僅有1至2年時間的過程。
車用電子的特殊性從其介面技術來看最為鮮明,例如LIN(Local Interconnect Network)、CAN(Controller Area Network)等都是屬於車用電子介面,這些介面都未應用於PC或CE產品中,相反地PC領域所常用的是USB或是ATA等介面形式。
唯一殊途同歸之處,在於無論是資訊還是車用領域,其內部所用的介面都不止一種,經常要搭配使用多種介面,例如PC內有PCI Express、USB、SMBus等,而汽車內也有LIN、CAN、MOST(Media Oriented Systems Transport)等。一言以蔽之,PC內部不可能僅用一種介面來連通全部零組件。相同地,一部汽車內也不可能只用單一介面來連通全8ECA各類系統。
車用電子所用的介面不僅與PC和CE領域大不相同,且各類型的介面都還在持續演化提升當中,近年來產業界提出的各類型車用介面,又以FlexRay最受矚目,FlexRay介面到底與以往的車用電子介面有何差異?為何需要此種新介面?FlexRay的出現是否會取代現有哪些種類的車用電子介面?以下本文將對FlexRay進行更深入的討論。

| 《圖一 FlexRay的註冊商標帶有一隻燕魟 》 | 資料來源:FlexRay.com |
|
介面技術版本演化
FlexRay 2.1 Rev A
雖然FlexRay介面技術的制訂和推行機構FlexRay Consortium早在1999年就已經成立,不過卻遲遲沒有公布FlexRay介面標準,直到2004年6月才進行發佈,且首次發佈的版本就是2.0版,這表示FlexRay 1.0從未出現過。值得注意的是,FlexRay並非屬於全然原創的新介面技術,其諸多技術內容皆參考更早之前的byteflight介面技術。
| 《圖二 如圖所示,byteflight與FlexRay較適合安全性操控的傳輸,CAN、LIN則適合車體性操控的傳輸,而MOST、IDB-1394等則適合車用影音媒體資訊的傳輸。 》 | 資料來源:Fujitsu.com |
|
FlexRay 2.0發佈後不到一年的時間,在2005年5月進行了一次修訂,亦即FlexRay 2.1版,其修訂範圍主要是在規範書中的第3章與第10章為主,重新編排第3章SDL程序部分,並整個移除第10章BG參考及BGSM部分,其他則包含了一些小範圍的修改,包括更新圖片,更正多處的非技術性內容等等,另外附錄B組態限制的內容則幾乎全部重寫。
在FlexRay 2.1之後於2005年12月發表的是FlexRay 2.1 Rev A版本,內容包括更新zLastDynTxSlot、重新安排通道閒置的偵測、新增a類型變數、用計時器取代位元計數器、修訂附錄B、以及其他如改以顏色區分SDL信號圖說等內容。
整體而言,FlexRay一開始便以2.0版本問世,其後的2.1、2.1 Rev A都只是小幅修訂,三個版本之間並無太大差異,不過細究來看2.1 Rev A確實是目前最新也最為穩定成熟的版本,因此半導體業者不約而同地在2.1 Rev A標準發表後,才正式推出對應支援的控制晶片及收發器晶片。
版本應用概況
2005年底當各半導體業者幾乎與2.1 Rev A標準同步發表支援晶片後,經過了一年的時間終於有實際商用車款採用FlexRay作為車用介面,亦即德國BMW的新款X5 SAV(Sports Activity Vehicle)系列車種,主要使用Freescale及NXP的FlexRay晶片。2006年底率先於北美市場銷售,全球其他市場則在2007年春正式銷售。不過BMW X5也僅是作小幅且保守性的運用,只在底盤懸吊的氣體阻尼系統(pneumatic damping system)部分使用FlexRay介面,運用該介面進行電子式的阻尼控制,進而實現自適性駕駛(Adaptive Drive)的新特點,除此之外全車其餘各處仍使用其他的車用介面。
| 《圖三 德國BMW於2006年底發表的新車X5,其底盤懸吊系統位置已採行FlexRay介面,透過電子控制方式來控制阻尼,使駕駛能更平順操控全車。 》 | 資料來源:FlexRay.com |
|
在支援晶片方面,最先推出支援FlexRay的半導體業者如美國的Freescale與NXP,這兩家業者也是最早加入FlexRay Consortium的晶片業者,此後其他業者也隨之跟進,包括德國的Infineon、日本的Fujitsu、Renesas、NEC等等。
FlexRay介面的特性
FlexRay介面與以往的車用電子介面有何不同?或者應該這麼問才更為清楚:現有的車用電子介面有何不足之處,因此需要另外設計FlexRay介面?上述疑問便可從FlexRay的特性中來瞭解。
雙通道高速傳輸
FlexRay首先強調的便是傳輸速率。FlexRay每一條通道(Channel)的傳輸率為10Mbps,而每個FlexRay節點(Node)可連接一條通道,可連接兩條通道,但不能連結三條通道。且連接兩條通道時,可以將第二條通道視為第一條通道的備援(Redundant;亦稱冗餘)通道,但也可不作為備援通道而當成視為一般運行通道。如果兩條通道都為一般運行通道,則傳輸速率則為單一通道的2倍,因此可達20Mbps。
電壓與傳輸介質的限制
若從PC或CE領域的角度來看,20Mbps的傳輸速度是相當慢的匯流排介面,然而車用介面強調的是強韌的抗環境能力,所以邏輯準位電壓都較高,一般位於14V~42V,而非PC、CE領域所使用的3.3V或是2.5V,因此在較高電壓準位的環境下,仍有20Mbps的傳輸速度實屬不易。
此外,若以光纖傳輸介質為基礎,當然會有較高的傳輸速度,像是MOST即指定使用光纖為其傳輸介質,因此擁有23MBaud(鮑率)的傳輸速率,但目前FlexRay還是以銅線(Metal)為主,在傳輸速率上自然會受到限制。不過FlexRay也允許使用塑膠光纖(Plastic Of Fiber;POF)作為選擇性的傳輸介質方案。塑膠材質的光纖優點在於比玻璃、石英材質的光纖價格更為低廉,且具有比金屬線路更佳的抗環境能力。
同步時基性與時間觸發
再者FlexRay具有同步時基性的傳輸特性,以FlexRay介面連接的各節點,都依據相同的時序來運作,且每隔一段週期時間,就會自行確認時序的偏差性,自動對偏差進行修正。這項的傳輸特性,可將時序偏差限制於一定限度內,使時序的精確度介於0.5微秒(uS)~10uS之間,而一般多為1uS~2uS之間。高精確的時脈傳輸特性,再搭配時間性觸發(Time-Triggered)、分時多方存取(Time Division Multiple Access;TDMA)的協定作法,可規定FlexRay的傳輸延遲時間限制在50uS之內。
備援性
另外即是上述曾約略提過的備援性。除了運用第二通道作為備援傳輸外,FlexRay也允許在同一通道內重複發送相同內容訊息,重複發送可增強資料收發的可靠性,不過缺點是增加傳輸頻寬的耗用與負擔,所以這樣的方式在FlexRay標準中被視為選用方案,只在傳遞重要的訊息時才使用。
彈性的網路拓墣
最後是彈性化的連接拓樸(Topology)。FlexRay可以傳統常見的匯流排(Bus)方式來連接各節點,也可用星狀(Star)的放射性方式來連接各節點,或者同時使用兩種連接方式(Mixed),其中匯流排方式屬被動式,星狀方式則有被動式與主動式兩種。
| 《圖四 FlexRay的特點之一是靈活彈性的連接拓樸,圖中為4種FlexRay允許的連接拓樸:被動式匯流排型、被動星型、主動串接星型、以及主動星型為主並以被動匯流排型為輔的混合型。 》 | 資料來源:www.evaluationengineering.com |
|
FlexRay將取代CAN
上述FlexRay具有的技術特點,即是為了取代現有的CAN車用匯流排。
從1980年代開始使用的CAN介面,用於車體系統中的各種控制層面,然而近年來由於車用電子式控制已經越來越複雜,CAN介面逐漸無法勝任,因此產業界才會提出新式FlexRay車用匯流排標準,取代相形之下已經沈重吃力的CAN介面技術。
傳輸速率過低
首先在速率方面,CAN僅有1Mbps,已難以因應傳遞多變快速訊息的車用環境,相對地FlexRay擁有10Mbps,使用雙通道則可至20Mbps,是CAN的10倍至20倍速率。現有的諸多車款應用中,單一的CAN介面已不敷使用,經常要使用2組以上的CAN介面。
過於僵化的事件觸發模式
其次CAN採事件性觸發(Event-Triggered),在一些具急迫性的車用控制上並不適用。雖然CAN也延伸發展時間性觸發的傳輸方式,但其延伸支援的效益有限。相對地FlexRay採原生的時間性觸發傳輸,並以此為基礎運用動態時間段可兼顧事件性傳輸,加上FlexRay採取更為嚴謹的時脈同步機制,因此能因應更嚴苛、更快速反應的控制訊息傳遞。
不適合急迫性的感測方式
更重要的是,FlexRay採行分時方式進行多方存取,將時間切分成時槽(Slot)方式來運用。相對地CAN的多方存取採行載波感測的碰撞方式(Carrier Sense Multiple Access;CSMA),這種碰撞方式的問題在於,會使想要收發的各節點,必須嘗試爭搶匯流排的使用權。倘若無法取得使用權就必須持續嘗試,因此無從保證訊息能在一定的時間內可被送出,這也是CAN不適合急迫性即時控制的一項主因。
節點數少
另外FlexRay可連接的節點數也多過CAN,1組CAN最多可連接16個節點,且速率必須從1Mbps降至500kbps,相對地FlexRay若採行Bus匯流排型態,最多可連接22個節點,而星狀型態或混合型態更可達64個節點。
例外之處
FlexRay在各項表現上幾乎都超越以往的CAN,但也有些例外之處。例如在協定傳送的ID方面,CAN可使用11-bit長度,也可使用29-bit(位元)長度,然現階段的FlexRay僅能使用11-bit。此外CAN可在線路長度與傳輸速率上異中求同,在1Mbps速率時最長可達有40公尺,若速率降至125kbps則可延伸長度至500公尺。相對地FlexRay若以主動式星狀連接,則2個主動星狀節點間最長連線距離只有22公尺。
與其他介面標準共存共榮
不過FlexRay並不會用來取代其他例如LIN或MOST車用電子介面,其他既定介面標準各司其職,像是LIN介面無須重視傳輸速度、也不需重視精確的工作時序,而是訴求低成本的簡單控制,如電動車窗、車門鎖等應用,與CAN或FlexRay的車身主體操控性的應用層面大不相同。
| 《圖五 低速LIN、中速CAN以及高速FlexRay都屬於車用的控制傳輸介面,MOST則屬於車用的資通訊(Telematics)媒體資訊傳輸介面。 》 | 資料來源:FlexRay.com |
|
同樣地FlexRay也不會取代MOST或IDB-1394等。MOST或IDB-1394主要是用來傳遞車用影音視訊多媒體資料,例如倒車入庫時的車尾影像,或是車內娛樂通訊系統的畫面傳輸如電子地圖、車內娛樂影片播放、電視遊樂器畫面等等。多媒體資料的傳輸量比車體控制性的傳輸量還要大,不是FlexRay所能負荷,因此FlexRay不可能取而代之。
逐步而漸進地取代CAN介面
雖然FlexRay的目標是取代CAN,且幾乎所有的新特性設計都是針對CAN而來,然而現階段推行FlexRay的業者,也不敢大張旗鼓地表示立即採用FlexRay取代CAN,而是以低調暗示的方式來推展,這個現象很有趣,其原因如下。
CAN技術持續革新中
CAN介面的強化提升規劃仍在持續中,例如以時間觸發的CAN介面(Time Triggered CAN;TT-CAN)可提升傳輸速度,如此將會拉近CAN與FlexRay之間的技術差距。
市場已經普及應用
CAN介面技術已發展10多年以上,市場已經普及應用,支援CAN介面的收發器和控制器晶片等,其價格相當低廉,短時間內支援FlexRay介面的收發器和控制器晶片,無法達到相同低廉的水準。
取代條件仍有待加強
FlexRay必須在複雜性的車用電子控制上才能發揮特長,反之在簡單架構的車用電子控制上,使用CAN與使用FlexRay的差異條件並不大,甚至在1組CAN介面無法因應設計時,只要再增設若干組同樣可以解決。FlexRay必須在增設多組CAN介面都無法因應、或因此CAN成本高過FlexRay時,才有機會被應用,FlexRay的不可替代性仍有待加強。
設計FlexRay的應用獨特性
基於上述原因,FlexRay將漸進地取代CAN,一方面支援FlexRay介面的晶片,在價位上會逐步與支援CAN晶片價格拉近,另一方面汽車越來越複雜的電子控制設計趨勢不可避免,這也會有利於FlexRay。
即便FlexRay不訴求取代CAN,也依然有其運用價值,例如將FlexRay做為車體中多條CAN介面的匯流骨幹,亦即採用FlexRay和CAN並存並用的架構,如此可簡化骨幹控制網路的線路設計。現在整部汽車也不可能全部採用CAN介面,在簡易的末稍控制上會應用成本更為低廉的LIN介面,且多個LIN介面也會往上匯流到CAN介面中。
而且,FlexRay之所以設計成能以匯流排以及星狀方式連接,其實就是為了讓原有使用CAN採行匯流排方式連接設計手法的工程師快速習慣,所以FlexRay相容具備兩種連接方式。不過真正能發揮FlexRay優勢的連接方式還是主動式星狀連接以及雙通道連接模式,單通道與匯流排方式都是為了相容與低成本導向所提出的權宜之計。
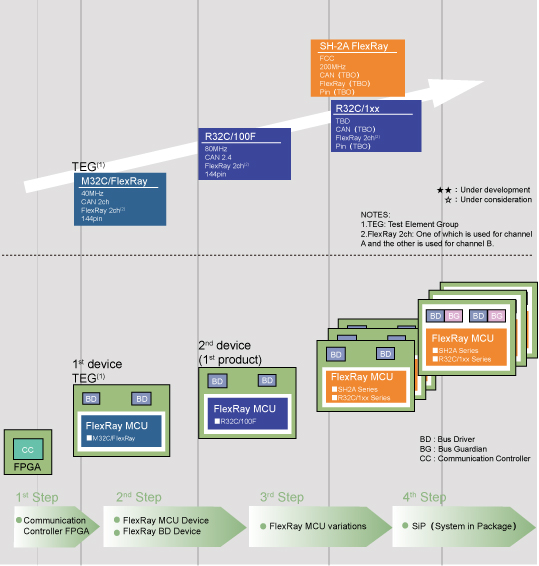
| 《圖六 Renesas對FlexRay技術的支援展望圖(Roadmap),最初先以FPGA來試製FlexRay的通訊控制器,之後推出FlexRay的控制器、介面驅動器(或稱介面收發器)、第三步則推出不同型款的FlexRay控制器,第四步則會加入Renesas最擅長的SiP整合技術。 》 | 資料來源:Renesas.com |
|
不僅FlexRay介面必須盡可能相容於CAN,就連現階段業者推出的FlexRay晶片,也有類似的相容設計。多數的FlexRay控制器晶片除了內建FlexRay介面外,也都內建多組CAN介面及LIN介面,為了就是要讓工程師在設計應用時能更方便地將FlexRay與其他車用介面連接,使FlexRay成為各類車用介面的骨幹,或做為轉接的角色,以此推廣FlexRay的應用。
FlexRay的明亮未來
未來FlexRay確實具有不錯的前景,因為會有越來越多來的車用控制是從傳統機械式控制轉變成為電子式控制。例如過去是機械式的方向盤,如今則為動力方向盤,機械式方向盤以油壓或機械連桿方式來操控方向,高速行車時方向盤的轉向壓力也會增加。相對地,動力方向盤由馬達或其他動力來操控方式,車內駕駛只是將方向盤的轉動角度轉換成電子信號,再以此信號通知馬達轉變方向,如此操控將不受速度壓力所影響。
動力方向盤此種透過電子線路來操控的作法,亦即一般所稱為的線控(X-by-Wire)。未來汽車將會有越來越多的操控方式改以線控實現,例如線控駕駛(Drive-by-Wire)、線控煞車(Brake-by-Wire)等等。再加上未來複合動力的汽車也將越來越普及,一部汽車可能使用汽油為動力,也可能使用天然氣瓦斯為動力,也可能以電瓶、氫氣、乙醇為動力,屆時車用電子控制必然更加複雜。凡此種種大環境的變遷趨勢,都是未來FlexRay介面被看好的主因。


