磁電阻應用於感測器
電子技術的應用日漸廣泛,對汽車的發展具有決定性的改善作用。未來的進一步發展,也會有很大程度是由創新性電子元件驅動。感應器技術可用來檢測車輛及其周遭的環境條件,因此具有特殊意義。
有多種感應器系統可用於此種目的,例如測量加速度、溫度或轉矩等。磁場測量感應器在汽車領域尤其常見,主要是用於機械變量的非接觸式檢測。通常這種感應器透過霍爾元件,或者依據異向磁電阻(AMR)效應來執行。相較於霍爾效應的解決方案,AMR 感應器有許多優點,例如抖動較少、靈敏度較高。但在提升準確性或降低整體系統成本方面,二者不分高下。除了在電子羅盤中利用磁電阻感應器測量地球磁場之外,在借助磁場指示機械系統的運動和位置時,也可使用磁電阻感應器確定角度和速度;防滑系統、引擎和傳送控制都需要這種數據。產生磁場的永久磁鐵的機械設計和選擇,對影響測量數據的獲取影響深遠。因此,在執行整個系統之前使用模擬技術進行深入分析便非常重要,以確保達到目標功能並降低成本。因此,在超前開發過程中建立系統模型與後續產品的開發,此種技術對於解決設計過程中產生的類似問題,便能發揮重要作用。下文將探討新型速度感應器的整體系統建構和模擬。
訊號檢測
現代感應器系統主要由兩個元件組成 ── 基本感應器和訊號處理專用積體電路(ASIC),如圖一所示。
(表一) 德文專有名詞釋義:
Sensorfahne zur MontageuntersttzungMagnet |
作為貼裝支持的感應器片磁體 |
Signalverarbeitungs-ICMR-Sensor
|
訊號處理專用積體電路(ASIC)MR 感應器
|
現已證明,後來由 Lord Klevin 於1857年發現的異向磁電阻效應,特別適用於檢測磁場,首先考慮通具多種磁區架構的鐵磁材料。這些稱之為韋斯磁區的架構(Weiss domains),其內部磁化的方向彼此不同。如果將這種材料平鋪為一個薄層,那麼磁化向量便處於材料層的平面方向,也可較精確地假設只存在一個磁區。當這種元件暴露於外部磁場中時,後者會改變內部磁化向量的方向。如果同時一股電流透過該元件,就會產生電阻,如圖二所示。
(表二) 德文專有名詞釋義:
Magnetisierung |
磁化 |
Permalloy |
強磁性鐵鎳合金 |
Strom |
電流 |
這取決於電流和磁化之間的角度。當電流和磁化方向彼此成直角時,電阻最小,當二者平行時,電阻最大。電阻變化的大小取決於材料。鐵磁性材料的性質也會決定對溫度的倚賴性。電阻最大變化為2.2%,且對溫度變化回應良好的最佳合金是81%的鎳和19%的鐵所組成的合金,恩智浦半導體(NXP)所有感應器系統中的基本感應器,都採用這種強磁鐵鎳合金。同時,在惠斯登電橋迴路中單獨配置幾個AMR電阻,可加強輸出訊號並改善溫度回應特性。此電路也可在製造過程中進行微調。圖三 便顯示如何在晶片上配置AMR元件。
確定速度的裝置多半由兩種元件組成︰編碼器輪和感應器系統。編碼器輪可分主動式或被動式。主動輪已磁化,因此MR感應器可檢測北極和南極之間的變化。若是被動輪,則由一種齒狀架構便可代替磁化。如圖一所示,感應器頭上也必須有一塊用於產生磁場的永久磁鐵。接下來,本文只討論因公差極小而著稱的被動編碼器輪。當感應器相對稱地面對一個齒或者被動輪兩齒之間的空隙時,這不會使AMR元件的磁化向量產生任何偏斜。忽略外部雜訊場並考慮橋電路時,輸出訊號獲得零值。然而,如果感應器頭處於齒邊緣前面,則磁輸入訊號達到極值。齒/空隙或空隙/齒切換類型的函數結果,會與磁輸入訊號正弦曲線的最小值或最大值非常接近。
訊號處理
為了確定速度,將磁輸入訊號編碼處理為電脈波序列,而且通常透過 7/14 mA 協議傳送。在最簡單的情況下,可使用比較器產生脈波序列,通常會向比較器電路添加磁滯以消除低雜訊的影響。
然而,這種施密特觸發器(Schmitt trigger)在雜訊水準較高的條件下,不能確保其功能性。例如,感應器頭和編碼器輪之間空隙若出現顯著波動,將會導致磁輸入訊號振幅發生類似的波動。如果振幅變得很小,甚至不再超過或低估磁滯臨界值時,則不管編碼器輪的位置如何,輸出訊號都能保持其最後狀態。在感測ABS系統中的輪速時,感應器和編碼器輪之間的距離可能會出現這種變化。當負載出現變化、例如突然轉向動作時,橫向作用於輪上的離心力,會在輪軸上產生彎曲力矩。這將改變連接感應器相關軸的編碼器輪,使其反過來與輪懸架相連接。
磁位移也會影響系統的正常運轉。例如,雜訊場可使實際測量訊號加強或減弱,致使只有施密特觸發器的一個臨界值被超過或低估,或者一個也沒有被超過或低估。然而,位移不僅是由外部引起的。被動輪極高的速度可使輪中產生渦流,而這又會產生磁雜訊。所產生的位移便會影響操作的可靠性。
為消除此雜訊對輸出訊號的影響,另一封裝中裝入了訊號處理專用積體電路(ASIC),後者也包含一個線路驅動器,以便為訊號處理和高電壓界面提供電源電壓,如圖一所示。圖四 所示則為訊號處理架構。用於排除故障的中心元件為包括可調式放大器、偏移抵消電路和智慧比較器(Smart comparator)。
根據感應器和編碼器輪之間的距離,可調式放大器可以與訊號層級相配合。對於偏移抵消電路,有一種與高通濾波器不同的控製系統,可消除偏移,同時將系統頻率保持為 0 Hz。要不然,就不可能檢測到停止不動的編碼器輪。智慧比較器的臨界值是可變且可設置的,使磁滯處於訊號振幅的20%和45%之間,這可確保充分減低雜訊,而且振幅突降到50%,也不會影響系統的正常運轉。模擬前端的個別組件控制,則透過數位界面執行。所述系統均利用模擬技術開發和驗證。以下將概略介紹系統開發,同時敘述如何使用模型來改進設計。
系統模擬
要開發感應器系統,首先必須對預期的磁輸入訊號有全面的了解,亦即要先了解編碼器輪和感應器頭上永久磁鐵的標準規格、預期尺寸以及公差。透過ANSYS方法進行FEM模擬便可確定磁場。這裡就有對編碼器輪、感應器元件和磁體進行建構的問題,如圖五所示。
然後便可根據感應器元件和編碼器輪之間的距離,確定與其呈函數關係的磁場強度。圖六是感應器橋上的磁輸入訊號與距離呈函數關係的3D示意圖。很容易看出輸入訊號呈正弦曲線,訊號振幅隨距離增加而明顯減小。除了距離之外,位置偏離也會導致振幅減小。例如,如果感應器頭不在編碼器輪前面的中心位置,那麼訊號振幅也會減小。根據FEM模擬方法,這樣也可將機械規範轉化成預期磁變量。與氣隙變化不同,傾斜會導致偏移,這同樣會影響系統的正常運轉。FEM模擬也可以預估其造成的影響,如圖七所示,而且結果可直接轉化為可接受的位置公差。
| 《圖六 與感應器頭和編碼器輪間距離呈函數關係的磁輸入訊號模擬》 |
|
(表三) 德文專有名詞釋義:
確定磁場之後是感應器系統模擬。AMR元件的電阻變化是異向磁電阻效應的直接結果。這樣,磁場模擬的結果,會導致代表訊號處理中輸入訊號的電阻發生變化。對模擬前端進行建構時,可採用Simulink,這種行為模型是概念設計的產物,代表著產品開發的起點。每個Simulink會對應一個模擬訊號處理組件,例如放大器或過濾器。但是,尚未考慮模擬組件的控制部分,則是由數位系統執行。HDL設計則模擬透過數位方法執行的功能,而且在完成產品開發之後就會成形。因此,整體系統模擬是Simulink對模擬元件的行為模型以及ModelSim對HDL設計的共同模擬,如圖八所示。
這可透過模擬從概念階段順利過渡到HDL設計及後續階段。在共同模擬中,可用ModelSim中的Verilog代碼逐漸代替Simulink參考模型,從而可逐項驗証HDL設計。這個過程可持續進行,直到在Verilog中執行整個數位部分,而模擬系統部件仍保持為 Simulink模型,此工具組合也已證明對 IC 評估同樣有用。自始至終使用這種工具可以更容易理解IC行為,並可創建用來分析和解釋任何錯誤的框架。這些工具的主要好處在於能夠更快速、更準確地回覆客戶的查詢,以及更加了解與環境條件相關的感應器功能。
結果
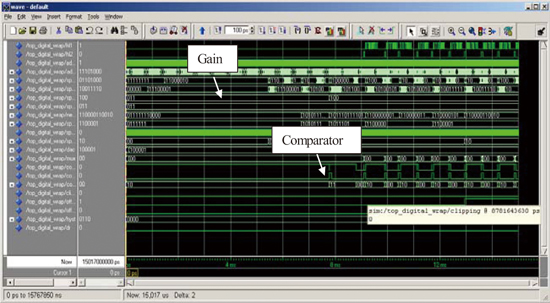
透過此項建構,可以分析與輸入訊號呈函數關係的系統行為。圖九中所示的第一張圖表,顯示透過改變感應器和編碼器輪之間的距離所產生的磁輸入訊號。此訊號是有限元件模擬結果,之後AMR效應可將此訊號轉化成感應器橋的電輸出訊號。中間的圖表則是模擬訊號處理的結果,最下面一張圖表則顯示輸出訊號。此器件使用A714/28mA協議。這種協議可用來傳送額外的訊息,例如感測旋轉或氣隙長度;除了這些結果之外,此協議也可檢查數位控制的工作情況。圖十顯示的是ModelSim中的訊號圖象實例。
| 《圖九 模擬結果︰電輸出訊號vs磁輸入訊號》 - BigPic:736x576 |
|
透過MATLAB進行模擬控制,並結合其他模擬器,可以創造更多選擇,例如首先可使模擬自動化。然後可以在MATLAB中進行訊號模擬使用大量演算法。例如,對所需系統和訊號參數進行蒙特卡羅(Monte Carlo)模擬,隨後進行自動化分析。透過FEM模擬器,例如NASYS,可以擴展所模擬的系統組件,甚至包括MR感應器頭和相關編碼器,從而將系統視域擴展到感應器周遭直接相關的區域。圖十一所顯示的是用於此目的整個工具鏈。
總結
許多汽車應用中都採用使用AMR效應的現代智慧感應器。對感應器系統的要求自然會因應用而有所不同。在執行整個系統之前,應先進行系統模擬以確保各項功能符合規範。假設發現磁變數、機械變數和電變數之間存在複雜的相互影響,只用一件簡單的模擬工具並不能解決問題。此時需要結合使用不同工具,每件工具都是針對特定任務的最佳解決方案。因此使用磁場模擬器來確定磁輸入訊號,同時Simulink對模擬輸入進行模擬。HDL設計之後,可對模擬部份進行數位控制模擬,最終整個系統執行全面模擬。建構已成為事先開發的一部分,並隨著產品開發的過程不斷改進,最後就會得到經過驗證確認符合產品規範的設計,以及可用來解決後續問題的模型,以符合市場需求。
(作者均任職於NXP恩智浦半導體德國漢堡汽車電子創新中心Automotive Innovation Center)