為了因應更高速、高效能的晶片技術,半導體製程的線寬技術不斷演進到奈米等級,因此必須提供單位時間內更大量的產出與較短的生產週期。在半導體後端製程中,將多個製程整合成為單一機台,簡化製程產線的機台種類以大幅縮短製程的週期。在有限的空間內,機台的體積並未因整合的特性而被允許增加,所以控制系統的配置是一個必須考量的重點,透過EtherCAT分散式控制系統,高性能、低成本、應用簡易、拓撲靈活的工業乙太網技術等優點,縮短現場佈線的時間並簡化其配線方式以利後續的維護工作。
EtherCAT工業控制自動化乙太網路技術
EtherCAT (Ethernet for Control Automation technology)-乙太網路控制自動化技術基於乙太網路通訊協議。此技術突破了過去其他乙太網路解決方案的系統限制,具有靈活的拓撲結構,簡單的系統配置,性能優越、操作簡便以及成本低廉等特點,因而使得過去無法選擇使用現場匯流排網路技術的應用領域得以實現採用此項技術,EtherCAT目前已廣泛運用於機械設計、運動控制等各式自動化與工業領域用途的場合。EtherCAT技術於2005年2月正式成為IEC規範—IEC/PAS 62407,並整合至國際現場匯流排技術的新一代標準IEC61158 中,國際標準組織 (ISO)亦已將EtherCAT納入ISO15745標準。
EtherCAT系統架構與運作原理
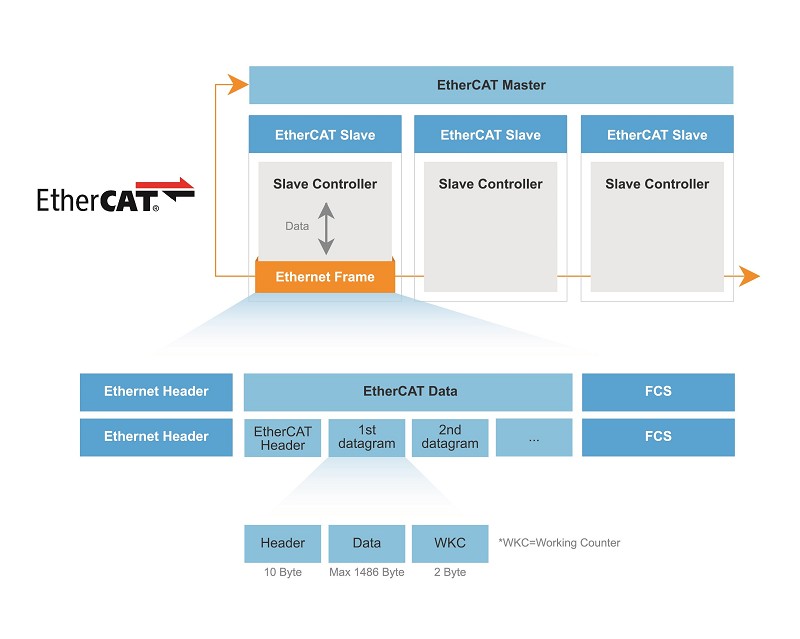
EtherCAT為一種實時(Real-time)工業乙太網技術,採Master與Slave架構,Master發送乙太網路封包給各個Slave,Slave從封包中取出相對應的數據並把所需更新的資料與數據插入封包內,而無須接收整個乙太網資料封包,在訪問到整個系統最後一個Slave時,封包會在此迴轉,經由最後一個Slave將處理過的封包傳至Master端,整個過程中封包的讀取與寫入作業只有幾奈秒的時間延遲。
EtherCAT拓樸結構
EtherCAT Slave的數據處理機制允許在EtherCAT網段內的任一位置使用分支結構,所以EtherCAT幾乎支援所有的網路拓樸,如線型、星型、樹狀結構或是菊花鏈(Daisy Chain)的拓樸架構,如圖2所示。
由於使用100BASE-TX的乙太網物理層,二個設備之間的距離可以到100公尺,一個EtherCAT區段的網路最多可以有65535個設備。若EtherCAT網路是使用環狀拓撲(主站設備需要有二個通訊埠),則此網路還有纜線冗餘的機能。
EtherCAT分布時鐘
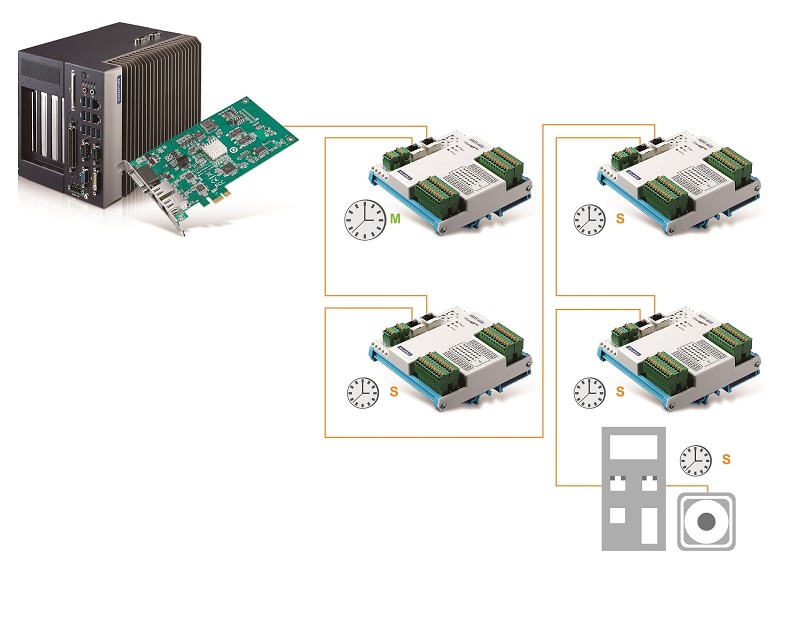
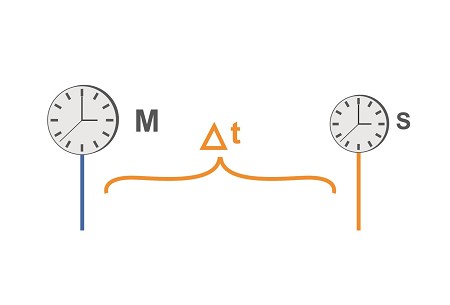
在運動控制中,多軸同步與IO同步對整個控制系統尤其重要,在分散式控制系統當中更為重要,以EtherCAT通訊架構來說,封包經由Master傳遞至Slave之間的過程,封包每經過一個Slave就會有延遲的效應,最後的Slave可能已經有了微秒等級的延遲。因此EtherCAT透過 IEEE 1588[13]標準的分散式時脈實現同步,與完全同步通訊中通訊出現故障會立刻影響同步品質的情況相比,分佈排列的時鐘對於通訊系統中可能存在的相關故障延遲具有極好的容錯性。
Master連接的第一個具有分佈時鐘(Distributed Clocks)功能的Slave作為參考時鐘(Reference clock),以此Slave的時鐘作為同步其他Slave的基準,並由主機控制器更新其他從端設備時脈,藉由Master端計算其參考時脈與每個從端設備時脈的時間差,將可得出個別從端設備系統時脈的偏移補償量(Offset Compensation),依此來達到從端設備的時脈同步化,並提供所有Slave設備絕對的系統時間與一致同步性。
採用EtherCAT,資料交換就完全基於純硬體機制。由於通訊採用了邏輯環結構 (借助於全雙工快速乙太網的實體層),主站時鐘可以簡單、精確地確定各個從站時鐘傳播的延遲偏移,反之亦然。分佈時鐘均基於該值進行調整,即使通訊循環週期有抖動,時鐘的抖動遠小於1μs,大約接近IEEE 1588精密時間協議的標準。因此EtherCAT的主站設備不需針對時鐘使用特殊的硬體,可以用軟體實現在任何標準的的乙太網MAC,即使沒有特殊的通訊協處理器也沒有關係。
EtherCAT性能與優點
EtherCAT 擁有傑出的通訊性能,接線非常簡單,並對其它協議開放。EtherCAT在30 μs內可以更新1000個I/O資料,相當於在100Mbit/s的乙太網傳輸125個位元組的資料。讀寫一百個伺服軸的系統可以以10 kHz的速率更新,一般的更新速率約為1–30 kHz。可選擇雙絞線或光纖,並可以用簡單的線型拓撲結構替代昂貴的星型乙太網拓撲結構,無需昂貴的基礎組件。EtherCAT還可以使用傳統的交換機連接方式,以整合其他的乙太網設備。其它的即時乙太網方案需要與控制器進行特殊連接,從站的微處理器不需處理乙太網的封包。所有程序資料都是由從站控制器的硬體來處理,EtherCAT只需要價格低廉的標準乙太網卡(NIC) 便可實現。
應用EtherCAT技術於半導體IC包裝設備
在半導體後端製程中,將多個製程整合成為單一機台,簡化製程產線的機台種類,亦可以大幅提升製程的週期縮短。相較於過去,機台的組成為個別特定功能的機械設備,為了因應整合與高速生產的需求,必須將多個特定功能的機器以及多站完成的工作,整合為單一機台來實現。
此時,整合機台的機構複雜度相對提升,對於機台內的運動軸數也因整合了多製程於單一設備而相對增加許多。此應用案例說明如何將EtherCAT多軸同步的運動控制應用於半導體IC包裝設備,同時達到高產能、高精度以及後續簡易維護等需求。
系統需求
因多個特定功能與製程以及多站完成的工作,整合為單一機台來實現,機構複雜度也相對提升,對於機台內的運動控制軸數也會相對的增加許多。此專案的系統需求如下:
1.軸控的數目需達31軸,其中包含步進與伺服馬達。
2.高精度龍門運動控制
3.在有限的空間內,機台的體積並未因整合的特性而被允許增加,所以控制器的配線是一個必須考量的重點,不僅會影響現場佈線的時間與成本,更會影響後續的維護工作。
4.需高達數百點DI/DO控制
5.在檢測部分,需要引入視覺檢測,必須搭配軸控的位置比對與觸發信號功能,以作為精準的高速連續(on-the-fly)取像。
IC包裝設備系統架構
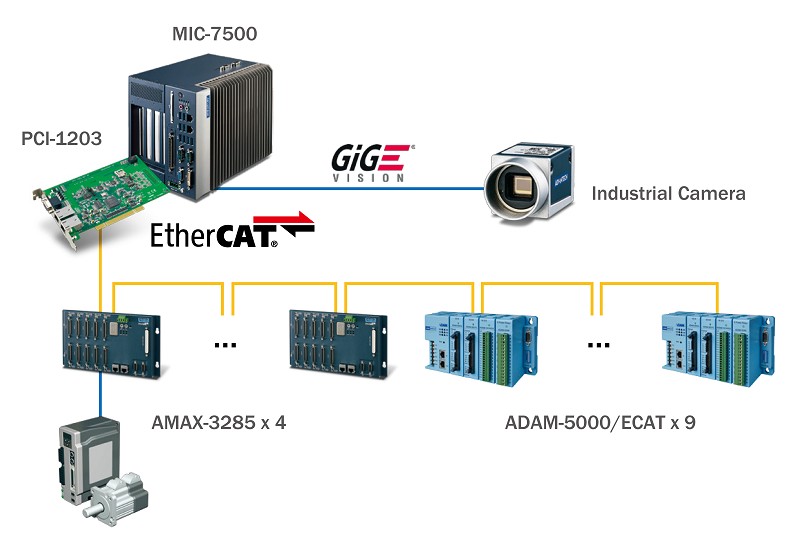
此設備採用研華EtherCAT解決方案,架構如圖6所示:
項目 |
說明 |
PCIE-1203 |
EtherCAT主站控制卡 |
AMAX-3285IO |
EtherCAT 脈衝模組 |
ADAM-5000/ECAT |
EtherCAT分散式高速I/O從站 |
QCAM-G1600-060CE |
GigE介面工業相機 |
MIC-7500 |
高效能工業電腦平台 |
設備系統說明
PCIE-1203是一個2埠EtherCAT PCI主站控制卡,具備SoftMotion運動核心,適用於所有PC-Based的工業自動化平台,EtherCAT通訊及封包處理皆在PCIE-1203上自主執行與處理,可同時執行Motion與I/O應用程式。對於EtherCAT運動主站,連接31軸伺服與步進馬達和高速I/O模組的通信週期不超過500μs,高速I/O主站的週期時間不超過200μs,實時與高精度控制為EtherCAT主站之特點。
Slave模組包含AMAX-3285與ADAM-5000/ECAT。AMAX-3285是一個8軸EtherCAT轉脈衝運動模組,適用於所有脈衝型之驅動器並提供CW/CCW和脈衝/方向接口,無須購買昂貴的EtheCAT專用型馬達。ADAM-5000 / ECAT為4插槽分佈式靈活系統,可為EtherCAT提供高速、高精度Remote I/O,從基本DI/O到高速AI/O均支援。
效益與改善成效
1.EtherCAT分散式控制系統,只需一張主站卡即可同步控制31軸與巨量高速I/O,對比過去集中式系統,除了成本大幅降低且有精簡配線與後續維護方便且輕鬆等優點。
2.SoftMotion軟體核心滿足IC包裝檢測方案,提供多樣化的運動模組功能,如位置比較觸發實現精準且高速連續取像;針對IC包裝機的龍門(Gantry)架構,龍門差值補償功能解決機構本身的物理誤差,將龍門兩軸位置差值縮減50%達到高精度龍門運動控制,進而提升20%產能。
(本文作者謝淳鉅任職於研華Intelligent motion control部門)
參考文獻
[1]研華,應用EtherCAT解決方案提升整合式IC包裝機機台效能,http://www.advantech.tw/success-stories/article/257064e5-9280-4dbc-ba8b-65a2b4465a16,2017/04/20.
[2]研華,應用EtherCAT解決方案提升LED分選機機台效能, http://www.advantech.tw/success-stories/article/b6b41e49-f651-4308-86f5-f2ebe579f45,2017/04/20.
[3]EtherCAT技術協會,EtherCAT Technology Group(ETG), http://www.ethercat.org.
[4]EtherCAT Introduction, http://www.ethercat.org.
[5]EtherCAT Communication Specification, http://www.ethercat.org.
[6]汪曙峰、吳承學,串列式數位伺服運動控制及工業控制自動化乙太網路技術簡介,工業技術研究院機械所。
[7]郁極、劉艷強,工業乙太網現場總線EtherCAT 驅動程式設計及應用,北京航空航天大學出版社”,2009年8月。