在恩智浦半導體(NXP Semiconductors),我與團隊共同開發了一種驗證車用雷達積體電路(integrated circuit;IC)設計的新方法。這種左移(shift-left)的方法結合了前期資料表層級度量指標的驗證以及虛擬現場試驗。藉著專注於規格層級而不是硬體實現層級的度量指標,可確保使用來評估設計的驗證簽核(signoff)準則與客戶最為注重的準則相符。而且,藉由在虛擬現場試驗模擬路上情境,能夠以逼真的雷達IC硬體測試刺激物來實現環境迴圈(environment-in-the-loop)驗證。
我們的客戶之中包含了一級的汽車供應商,他們最關心信噪比(signal-to-noise ratio;SNR)和總諧波失真(total harmonic distortion;THD)等幾種被擷取於資料表上的性能表現度量指標。他們對於個別元件的測試結果、程式碼覆蓋結果、以及其他硬體實現層級的度量指標比較不感興趣,不過對大部分IC驗證團隊來說,這些結果卻是他們最主要的考量。
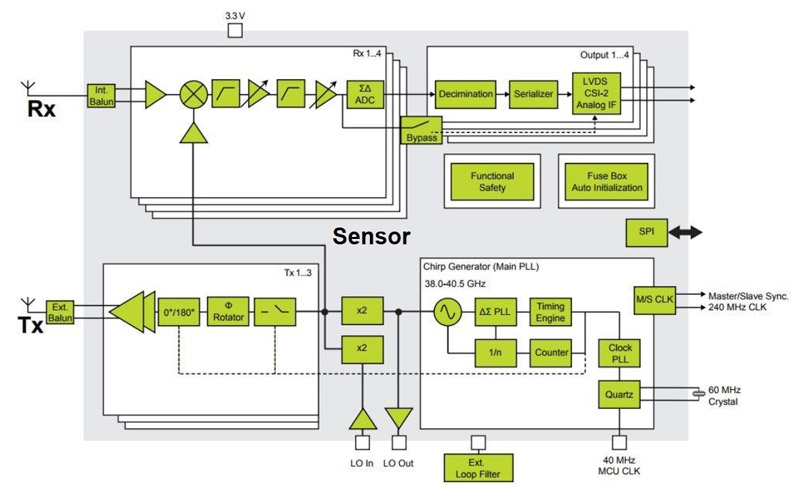
除此之外,客戶使用現場試驗及真實世界的駕駛情境來評估完整的雷達系統,而IC驗證團隊則經常使用與真實世界訊號相距甚遠的測試型態,用來評估個別的RF、類比,以及數位元件(圖1)。
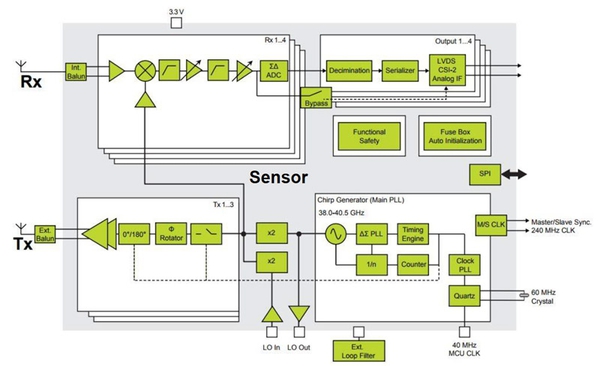
| 圖1 : 顯示RF、類比、數位子系統的車用雷達系統架構。 |
|
本團隊定義並執行的左移方法(shift-left methodology),並且使用此方法來驗證IC設計的流程和客戶們使用來評估設計的標準能夠相符。我們為虛擬的現場試驗所開發的道路駕駛情境,以許多客戶遵循的歐盟新車安全評鑑協會(European New Car Assessment Programme;Euro NCAP)標準為基礎,而且產生的功能和性能度量資料(例如SNR),與客戶用來對他們產品的IC元件進行評估的度量資料相同。
資料表層級之度量資料的早期驗證
以前在驗證車用雷達系統數位部分的時候,本團隊採用一種以通用驗證方法學(Universal Verification Methodology;UVM)為基礎的方法。這種方法包含以一個使用高階語言建立的參考模型來複製在測設計(design under test;DUT)的功能。接著針對給定的輸入測試向量,將DUT的輸出值與參考模型的輸出值進行比對。
這一個UVM測試並沒有擷取客戶所關注的SNR量測值和其他度量指標,而且即便是相對較小的實現改變,像是更新有限脈衝響應(finite impulse response;FIR)濾波器係數等,也會需要在測試台進行相對應的變更。維持測試台與實現的同步,需要大量的精力和時間。
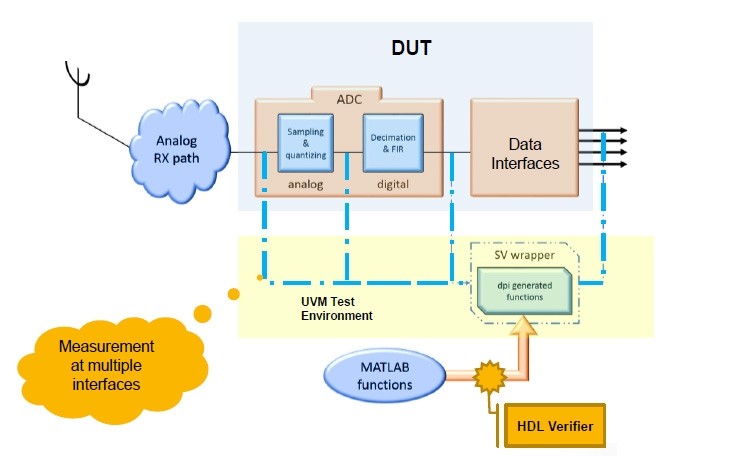
鑒於這種方法的缺點和限制,我們決定讓驗證精力著重在設計的功能性和性能表現,而不是將實現和參考模型一一對應。現在,我們開發了可以計算高階設計度量指標,像是SNR、THD、和功率譜密度(power spectral density;PSD)等的MATLAB演算法,以及阻帶衰減和通帶漣波等用於濾波器和其他元件的度量指標。利用HDL設計驗證工具(HDL Verifier),可以從這些MATLAB演算法產生SystemVerilog DPI元件,並整合至用於Cadence模擬環境的HDL測試台(圖2)。
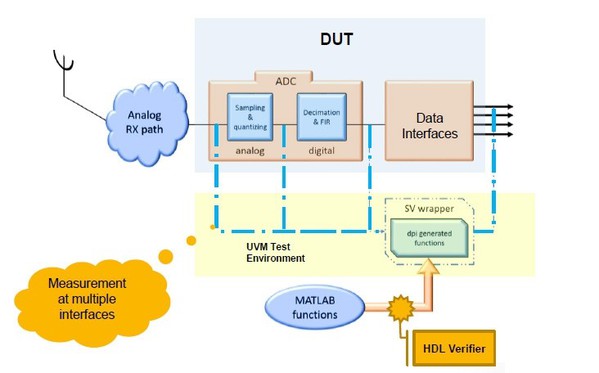
| 圖2 : 使用以HDL設計驗證工具透過DPI-C實現在SystemVerilog包裝器上的MATLAB驗證函式的測試環境。 |
|
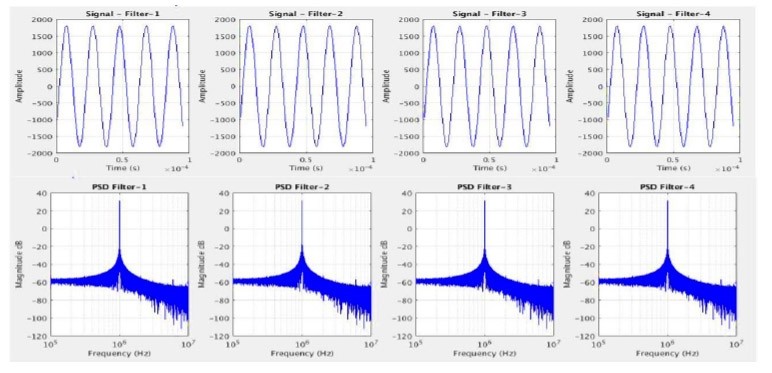
從DUT收集而來的樣本訊號資料會被傳送到從MATLAB驗證程式碼產生的DPI-C函式。我們將結果繪製出來(圖3),並且進行系統要求的檢查,以確保設計符合規格。
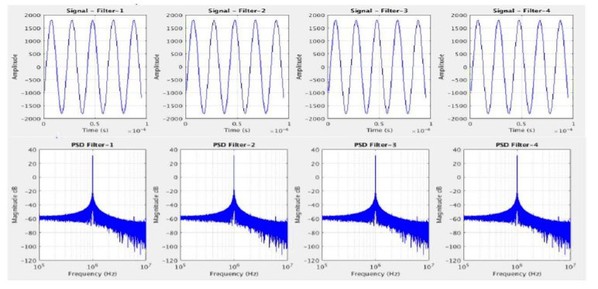
| 圖3 : 使用MATLAB計算的樣本訊號(上)和功率譜密度圖表(下)。 |
|
使用從MATLAB產生的DPI-C模型,能夠在Cadence HDL驗證環境的多個介面計算功能與性能上的度量指標。我們可以從驗證進行設計實現的解耦,並且以與客戶感興趣的度量指標更接近的抽象程度執行測試。
也可以重複利用從MATLAB產生的C程式碼,分析初次在矽晶片上的測試結果。舉例來說,從我們的雷達感測器IC收集樣本資料,並將資料傳送至由MATLAB產生的相同SNR計算C函式,該函式被用在SystemVerilog的設計驗證。
虛擬場域試驗
在轉換到度量指標導向的驗證法時,利用從真實世界駕駛情境產生的資料執行了虛擬場域試驗。以前,我們使用不同組的測試向量來分別驗證RF、類比、和數位子系統。其中某些測試向量是從在道路測試時取得的雷達反射推導而來。
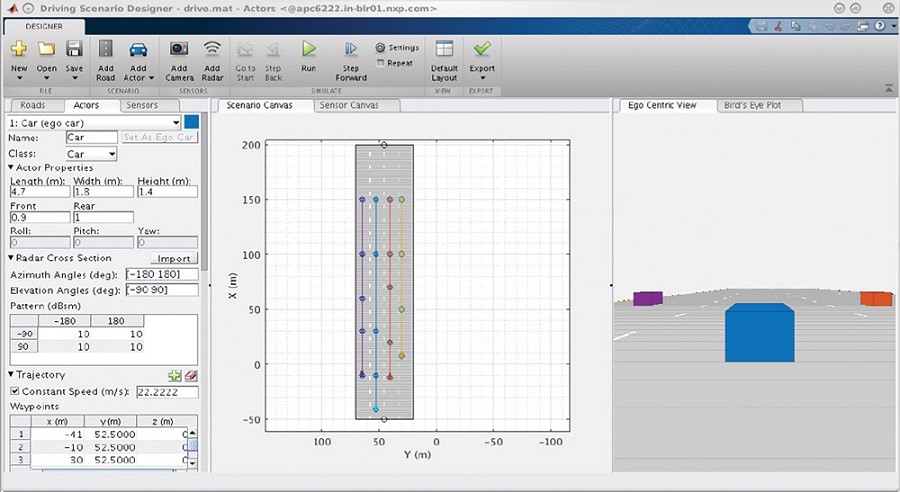
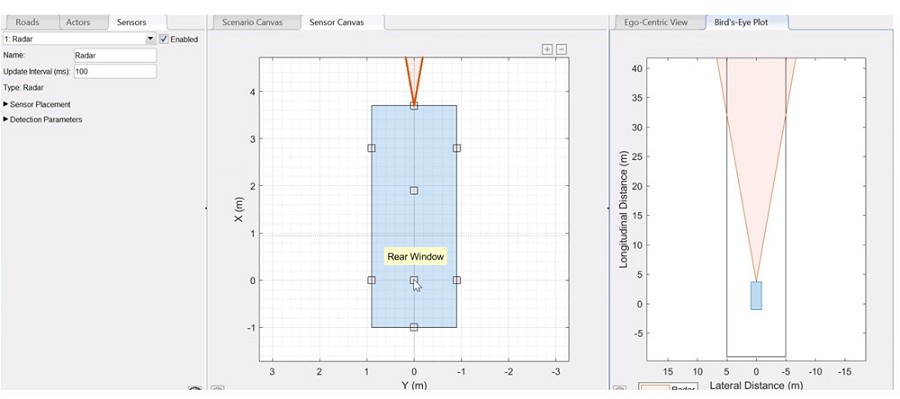
我們再將此方法延伸至包含環境迴圈(environment-in-the-loop)驗證。現在可使用自動駕駛工具箱(Automated Driving Toolbox)中的Driving Scenario Designer app建立駕駛情境(圖4)。App裡面的預建立情境代表了Euro NCAP測試協議,也就是客戶評估雷達系統性能的基準。
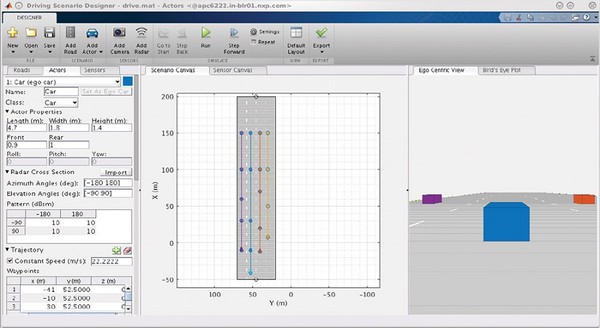
| 圖4 : 自動駕駛工具箱的Driving Scenario Designer app。 |
|
接下來,透過相位陣列工具箱(Phased Array Toolbox)建立一個雷達感測器模型。為了要讓這個模型符合實際感測器資料表上的規格,我們調整天線孔徑、峰值傳輸功率、接收器雜訊數字、以及天線元件數量等參數。
同時也調整會影響到頻率調變連續波(frequency-modulated continuous-wave;FMCW)波形的參數,包含最大範圍、線性調頻訊號的持續時間、掃描帶寬(sweep bandwidth)、和取樣頻率等。我們將感測器模型整合至稍早建立的駕駛情境,虛擬地在自主車輛上裝置雷達感測器(圖5)。
接著執行駕駛情境並擷取感測器混合器的輸出,也就是一個從情境中雷達經物體反射的解線性調頻(dechirped)訊號。我們透過ADC設計的Simulink模型傳送這組經過解線性調頻的訊號,以產生要餵入數位基頻處理鏈的數位IQ資料。
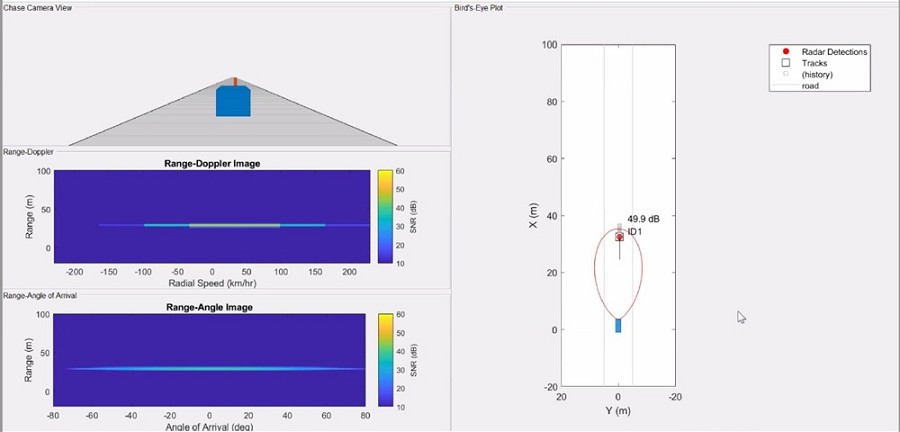
有了這樣的設置,我們可以依據Euro NCAP駕駛情境產生IQ資料,並且在開發階段的初期即執行數位處理鏈的虛擬場域試驗—可能比第一次實現在矽晶片的時間早了一年或甚至更多(圖6)。
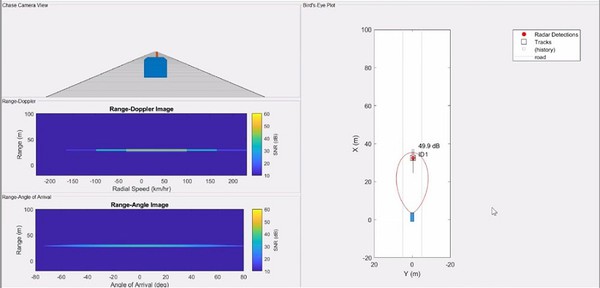
| 圖6 : 虛擬場域試驗的追蹤攝影機視角(左上)和鳥瞰圖(右)。 |
|
未來的任務
我們已將新方法與工作流程的使用延伸至下一代的雷達收發器。之後,會再將這些產品與環境效應整合至場景,藉此了解設計在如雨中或霧中等環境下的表現如何。
使用這項新的方法來進行車輛雷達系統數位元件的驗證不會受到任何限制,因此,我們期待將虛擬場域試驗運用在類比元件和其他應用上,像是車對車的通訊系統。本文聚焦於感測器實現數位部分的驗證,但這個環境迴圈方法可以很容易地延伸到驗證混合訊號和RF設計,如感測器設計的ADC。
(本文由鈦思科技提供,作者Sainath Karlapalem任職於恩智浦半導體)