本作品利用盛群HT66F2390微控制器作为核心,控制加热设备、对温湿度监控,做到风干烘衣功能,且具有过热保护,防止衣服的热损伤,再使用铝挤组成外框框架,设计机械结构,配合步进马达转动带动皮带,以实现我们设备的移动,做到类似机械臂的功能,使加热设备可以自由移动,将烘干衣服的每一个角落,完成智能烘干,烘得你衣。
前言
创作动机
又到了阴雨绵绵,黑云遮阳,使天空呈现一片灰蒙蒙的时期,雨时不时的落下,沾湿了身上干爽
的衣服,同时也让原本好心情不美丽了。经由这种不美丽的心情,让我有了灵感,可以挂上湿透的外
套,还能吹干烘暖,解决了放置衣服的问题,也处理了被雨水弄湿的烦恼。
可能洗完的衣服,还 没干又马上要用到, 在自己动手吹干衣服的时间内,还要准备其他事情,好好的化妆打扮自己,一团事情挤在一起,形成手脚不够用的窘境。如果 有一个可以帮自己烘干衣服的机器 就可以减省很多时间, 能放心的 处理其他事宜。
可能在前往公司的路途上,突然下起来了大雨,因为没有雨衣、雨伞等挡雨工具,造成身上的
衣服被淋湿,破坏了一整天工作的好心情,因为身上的湿衣服, 使得 心情烦躁,还要自己动手拿起吹风机,努力地 将衣服吹干 摆脱穿在身上的潮湿感,才能提起 好 心情工作。
创作目的
如果有一个可以自动烘 干衣服的机器,省去自己动手的步骤 ,按个按钮,等个几分钟就可以把衣服变干,不用自己拿吹风机吹干衣服又因为没注意到温度过高,造成衣服烤焦之类的损害,还可以节省自己动手的时间,做更多其他的要事,忙完衣服也好了,一举两得。
创新与使用性
利用MCU控制步进马达,带动皮带,作到移动出风口的功能,针对每个部份仔细的吹干烘衣,在衣服过热之前,挑整风力大小热度,达到一定干度后,移动至下一个位置,针对衣服的每一个小细节,烘干吹风,直到将衣服潮湿的全部都烘干的动作后,即会自动停止,作到智慧烘衣功能,干衣可以放心地交给他。
工作原理
工作原理及功能
一般烘干衣的温度为50用较低温的方式,慢慢烘干,比较不会伤衣料,可以用于较多种的衣服种类,智能烘衣机可以将温度调高至 75~80将烘干的时间所短,控制温度不会烫坏衣服,到达80℃时可将棉被中的细菌尘?消灭 [2]。
利用热风模组,提高烘衣的需求温度,利用微控制器,模组的强弱,主要为衣物的烘干,避免提升得太多,超过了75℃,调弱降低温度的上升,控制在50~70℃以内。
使用温度感测模组,侦测烘衣环境的温度,避免因为加热过度,导致高温的热气伤害了衣服。作为控制温度变化的小帮手,还能防止高温导致的意外发生,成为本作品安全的守门员。
使用MCU之主要核心功能
以HT66F2390微控制器驱动电热元件提升温度,再用风扇马达吹出热风,达到烘衣效果,透过温度感测器监控环境温度,使得温度不会太高,导致烤焦衣服或烧毁发生不可预期的意外,再透过湿度感测模组,得知环境湿度判断衣服是否吹干,烘干完成便会自动停止。
透过外部触控模组判断是否开启电源,开启继电器导通马达电源,启动后,使用马达移动加热模组器,利用微动开关校正初始位置。
完成后,等待接收到开始按键的启动指令后,开启热风模组及DHT22 温湿度感测模组,掌控本作品执行烘衣上所需的温度,做到调节温度、风力强弱,避免造成衣物上的伤害。
经过DHT22湿度感测模组所侦测到的数值,回传至MCU读取分析衣物是否已经恢复到原本干燥的参考数据,达到干燥后,即启动马达,移动下一个还湿润未干燥的地方,最后移动至底后,及完成工作并关闭加热模组器,回至初始位置。
作品结构
硬体架构
利用两组相同长度的铝挤,搭配滚珠螺杆与滚珠螺杆相同长度的铝挤和光轴组成外观框架,再使用两组相同长度的铝挤作为底座支撑,藉由滚珠螺杆结合步计马达转动放置平台,达到上下的移动功能。
使用步进马达、皮带及皮带轮带动,线性滑轨上固定热风模组,可以在做到左右移动。再将底板固定在滚珠螺感及光轴上,使得热风模组可以在框架内畅游无阻。
使用MCU控制两颗步计马达,决定上下左右的移动,让热风模组可以到衣服需要吹干的部分完成使命,在衣服后面装置DHT22温湿度感测器,利用风力将衣服吹向感测器,包覆DHT22的感测口处,创造较精密的量测环境。
硬体架构
触控模组接收到按钮讯号后,传送给HT66F2390微控制器,做相对应的按键功能,开器马达电源,控制步进马达驱动器,驱动马达做热风模组位置的校正,碰触到微动开关为归零的基准,掌握热风模组的位置,才能精准地控制后续移动,以免过头空转。
执行烘干作业时,MCU即会开启热风模组的电源,进行对衣服的热风输送,再传输开始讯号给DHT22,使他回传目前衣服的温度、湿度来得知衣服的状况,避免热损伤跟没把衣服烘干的窘境。如图一所示。
微处理器
HT66F2390 微控制器[1]的CPU 具有完全集成内部8/12/16MHZ 的震荡器,不需要外接元件,其工作电压分别为2.2~5.5V、2.7~5.5V、3.3~5.5V,所有指令都可以在1~3 个指令周期内完成。
周边具有58个双向I/O接口,可以连接多个其他模组块,做到整合、沟通、控制等功能;四个引脚与外部中断口共用,可透过外部的讯号,更改当前紧要的处理事项;以及全双工通用异步收发器-UART,方便用于基本的资料传输,连结其他蓝牙、电脑、Wi-Fi等;16个外部通道,精准度为12bit的得A/D转换器,以及MDU内建16bit对16bit的乘除法单元。
我们利用外部中断I/O接上触控模组,设立紧急停止键;使用乘除法器,处理DHT22 侦测环境温湿度后,所回传的数值,弄成标准格式,透过内部的硬体UART 传输至电脑,以方便分析,观察DHT22 所侦测到的数据,对温湿度的灵敏度,才能精准地控制温度及湿度,完成烘衣的重要参考数据。
DHT22数字温湿度感测器
DHT22温湿度感测器里面有一个电容式的感湿元件和一个NTC测温元件,还有一个小型的的八位元单机片所组成,拥有极高的品质、超快响应、抗干扰能力强、性价比高等的优点。如图二所示。
DHT22[3]的电源电压为3.3~6V。接上电源后,需等待1s已越过不稳定状态,期间不需要发送任何指令。 DHT22侦测到的环境温度、湿度的数值精度、环境的参数条件、响应时间、量测范围等,如表一所示。
表一、DHT22温湿度数据参数
|
参数
|
条件
|
Min
|
Typ
|
Max
|
单位
|
|
湿度
|
|
分辨率
|
?
|
?
|
0.1
|
?
|
%RH
|
|
?
|
16
|
?
|
Bit
|
|
重复性
|
?
|
?
|
±0.3
|
?
|
?
|
|
精度
|
25℃
|
?
|
±2
|
?
|
%RH
|
|
-20~80℃
|
?
|
?
|
±2
|
%RH
|
|
采样周期
|
?
|
?
|
2
|
?
|
S
|
|
响应时间
|
?
|
?
|
<5
|
?
|
S
|
|
温度
|
|
分辨率
|
?
|
?
|
0.1
|
?
|
℃
|
|
?
|
16
|
?
|
Bit
|
|
重复性
|
?
|
?
|
±0.2
|
?
|
℃
|
|
精度
|
?
|
?
|
?
|
<±0.5
|
℃
|
|
量测范围
|
?
|
-40
|
?
|
80
|
℃
|
|
响应时间
|
?
|
6
|
?
|
20
|
S
|
数据格式: 40bit数据=16bit湿度+16bit?度+8bit验证码 例子: 接收40bit数据如表二。
表二、温湿度数据格式
|
0000 0010 1000 1100
|
0000 00010101 1111
|
1110 1110
|
|
湿度数据
|
温度数据
|
验证码
|
湿度高8位+湿度低8位+温度高8位+温度低8位=的末8位=验证码
例如:0000 0010+1000 1100+0000 0001+0101 1111=1110 1110
湿度=65.2%RH 温度=摄氏温度35.1度,当温度低于摄氏零度时,温度数据的最高位置1。
例如:-10.1℃表示为1000 0000 0110 0101
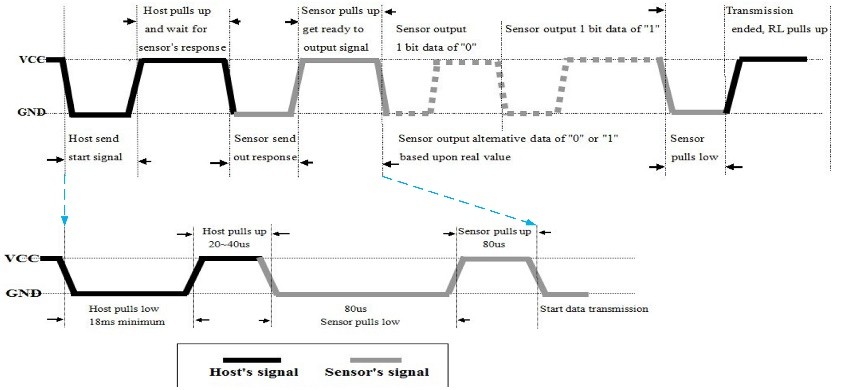
DHT22使用单一双向传输接脚,利用MCU微控制器发出指定讯号搭配相对的时间,即可驱动DHT22,回传所侦测到的数据,藉由相对应的时序来判读01数值。如图三。
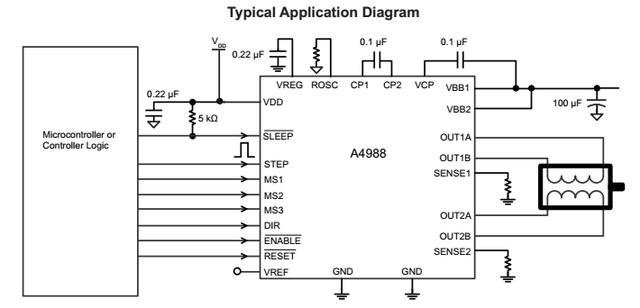
A4988 步进马达驱动器
A4988[4]是一款完全的微步电动机驱动器,带有内置转换器,易于操作。该产品可在全、半、1/4、1/8 及 1/16 步进模式时操作双极步进电动机,输出驱动性能可达 35 V 及 ±1 A。 A4988 包括一个固定关断时间电流稳压器,该稳压器可在慢或混合衰减模式下工作。如图四。
转换器是 A4988 易于实施的关键。只要在「步进」输入中输入一个脉冲,即可驱动电动机产生微步。无须进行相位顺序表、高频率控制行或复杂的介面编程,如图五。
将HT66F2390规划好的输出控制脚位,接上MS1、MS2、MS3五种步进模式,分别是全步进、1/2步进、1/4步进、1/8步进、1/16步进模式,如图五所示。再接上STEP给他一个脉波,透过一次01的变化,即会转动你所设定步进模式的一步,DIR可以控制转动步进的方向,1代表正转,0代表反转,如表三。
表三、微步进模式
|
MS1
|
MS2
|
MS3
|
Microstep Resolution
|
Excitation Mode
|
|
L
|
L
|
L
|
Full Step
|
2 Phase
|
|
H
|
L
|
L
|
Half Step
|
1-2 Phase
|
|
L
|
H
|
L
|
Quarter Step
|
W1-2 Phase
|
|
H
|
H
|
L
|
Eighth Step
|
2W1-2 Phase
|
|
H
|
H
|
H
|
Sixteenth Step
|
4W1-2 Phase
|
NEMA17步进马达
NEMA17[5]具有每相1.5A至1.8A电流,每相3至8 mH电感,保持扭矩为44 N·cm(62oz·in,4.5kg·cm)以上,每步1.8或0.9度(分别为200/400步/转),如图六。
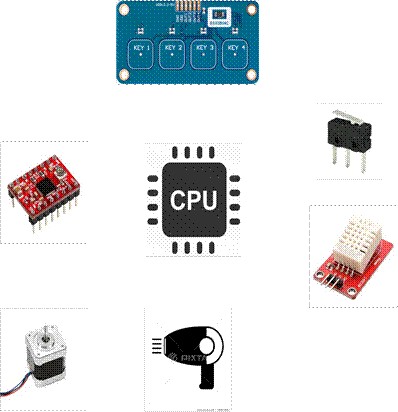
BS83B04C触控型Flash单晶片
BS83B04C[6]是一款具有8位高性能精简指令的Flash单晶片,具有完全集成的触控按键功能。触控按键功能完全集成于单机片内部,无须外部元件。如图七所示。内部具有看门狗定时器、低电压复位等特性,外加优秀的抗干扰和ESD保护性能,确保单晶片在恶劣的电磁干扰环境下可正常的运行。
CPU特性具有 fSYS = 2/4/8MHz,工作电压为 1.8V~5.5V,VDD=5V,系?时钟为 8MHz ?,指令周期为 0.5μs,提供暂停和唤醒功能,以降低功耗,震荡器有?部高速 2/4/8MHz RC – HIRC,?部低速32kHz RC – LIRC,多种工作模式:快速、低速、空闲和休眠。
热风模组
工作电压为110V,具有1000W的功率、风量为0.8m3/分,温度两段式变化、风量强弱选择。如图八所示。
硬体流程图
经由触控模组的按键操作所有动作,开关上电,校正模组位置,启动烘衣行程,还有强制停止钮,可以让你想让他停的时候停,如图九示。
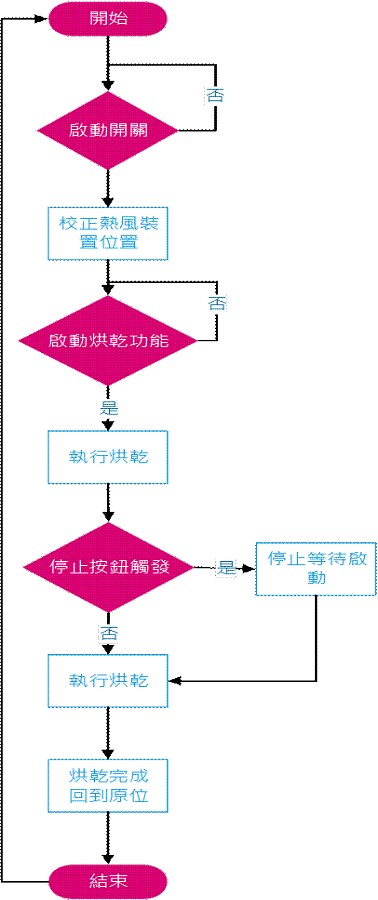
软体流程图
利用微动开关实现模组位置校正,在开始烘衣行程后,利用DHT22作为判断当前烘衣的区块是否烘干了,得以继续下一区块的烘干作业,以右边的微动开关触发,为完成横轴的作业的依据,可以向下移动至下个横轴的行程。如图十所示。
测试方法
测试驱动步进马达
先利用步进马达驱动器,接上马达后,去否会转动,将MS1、MS2、MS3接为H、H、L再透过MCU给STEP一个1600次的脉波,观察转动状况。
确认转动正常后,接上皮带、皮带轮,挂上热风模组,确认向左转、向右转是否正常动作。如图十一、十二所示。
测试步进马达带滚珠螺杆
测试马达带动滚珠螺杆上的放置平台是否正常运作,需不需要挑整步进马达微步间隔,来带动平台上的负载。如图十三所示。
DHT22温湿度测器数值
开启DHT22温湿度感测器后,使用我们的热风模组对着湿衣服吹向感测器,使衣服贴近我们的侦测口,观察温度是否有上升,湿度是否有下降,以达到我们烘衣的功能。
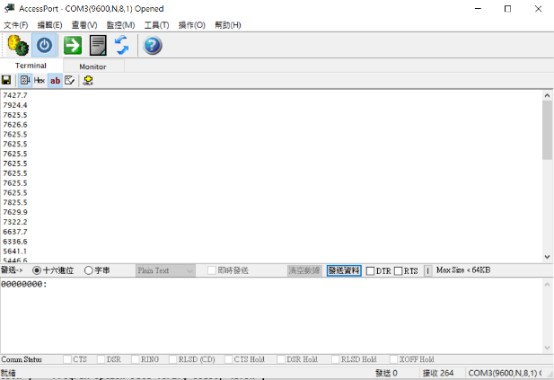
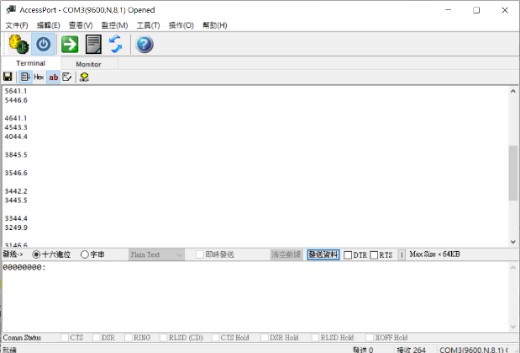
再将DHT22感测器所侦测到的数值,利用UART传至电脑显示,以方便我们观察述职的变化。前两位为湿度,单位是%R,后两位加一位小数为温度,单位是℃,如图十四、十五。
结论
我们使用DHT22温湿度感测器作为主要数据的参考来源, 经过测试,可以精准地 得知衣服的温度以及干燥程度,利用 MCU来操控周边设备,配合步进马达的转动,带动皮带,使得热风模组 可以 灵活 的 移动 ,这部分干了,就换下个地方 ,实现我们智能烘衣,让你可以 腾出双 手,等待衣服烘干即可。
(本文作者林华川1、陈胜君2为国立虎尾科技大学光电工程系1教授、2学生 )
参考资料
[1] Holtek Semiconductor Inc. HT66F2390,https://www.holtek.com.tw/documents/10179 / 116706/simht66f2350_60_70_90v160.pdf
[2]衣物烘衣机温度,http://www.comenb.com/21735.html
[3] DHT22温湿度感测器,https://cdn-shop.adafruit.com/datasheets/Digital+humidity+and+temperature+sensor+AM2302.pdf
[4] A4988驱动器,https://kknews.cc/zh-tw/news/jj8mzxe.html
[5] NEMA17步进马达,https://www.mouser.tw/datasheet/2/670/nema17-amt112s-1375041.pdf
[6] BS83B04C触控型Flash单晶片,https://www.holtek.com.tw/productdetail/-/vg/BS83B04C