本作品利用盛群HT66F2390微控制器作為核心,控制加熱設備、對溫濕度監控,做到風乾烘衣功能,且具有過熱保護,防止衣服的熱損傷,再使用鋁擠組成外框框架,設計機械結構,配合步進馬達轉動帶動皮帶,以實現我們設備的移動,做到類似機械臂的功能,使加熱設備可以自由移動,將烘乾衣服的每一個角落,完成智能烘乾,烘得你衣。
前言
創作動機
又到了陰雨綿綿,黑雲遮陽,使天空呈現一片灰濛濛的時期,雨時不時的落下,沾濕了身上乾爽
的衣服,同時也讓原本好心情不美麗了。經由這種不美麗的心情,讓我有了靈感,可以掛上溼透的外
套,還能吹乾烘暖,解決了放置衣服的問題,也處理了被雨水弄濕的煩惱。
可能洗完的衣服,還 沒乾又馬上要用到, 在自己動手吹乾衣服的時間內,還要準備其他事情,好好的化妝打扮自己,一團事情擠在一起,形成手腳不夠用的窘境。 如果 有一個可以幫自己烘乾衣服的機器 就可以減省很多時間, 能放心的 處理其他事宜。
可能在前往公司的路途上,突然下起來了大雨,因為沒有雨衣、雨傘等擋雨工具,造成身上的
衣服被淋濕,破壞了一整天工作的好心情,因為身上的濕衣服, 使得 心情煩躁,還要自己動手拿起吹風機,努力地 將衣服吹乾 擺脫穿在身上的潮濕感,才能提起 好 心情工作。
創作目的
如果有一個可以自動烘 乾衣服的機器,省去自己動手的步驟 ,按個按鈕,等個幾分鐘就可以把衣服變乾,不用自己拿吹風機吹乾衣服又因為沒注意到溫度過高,造成衣服烤焦之類的損害,還可以節省自己動手的時間,做更多其他的要事,忙完衣服也好了,一舉兩得。
創新與使用性
利用MCU控制步進馬達,帶動皮帶,作到移動出風口的功能,針對每個部份仔細的吹乾烘衣,在衣服過熱之前,挑整風力大小熱度,達到一定乾度後,移動至下一個位置,針對衣服的每一個小細節,烘乾吹風,直到將衣服潮濕的全部都烘乾的動作後,即會自動停止,作到智慧烘衣功能,乾衣可以放心地交給他。
工作原理
工作原理及功能
一般烘乾衣的溫度為50用較低溫的方式,慢慢烘乾,比較不會傷衣料,可以用於較多種的衣服種類,智能烘衣機可以將溫度調高至 75~80將烘乾的時間所短,控制溫度不會燙壞衣服,到達80℃時可將棉被中的細菌塵?消滅 [2]。
利用熱風模組,提高烘衣的需求溫度,利用微控制器,模組的強弱,主要為衣物的烘乾,避免提升得太多,超過了75℃,調弱降低溫度的上升,控制在50~70℃以內。
使用溫度感測模組,偵測烘衣環境的溫度,避免因為加熱過度,導致高溫的熱氣傷害了衣服。作為控制溫度變化的小幫手,還能防止高溫導致的意外發生,成為本作品安全的守門員。
使用MCU之主要核心功能
以HT66F2390微控制器驅動電熱元件提升溫度,再用風扇馬達吹出熱風,達到烘衣效果,透過溫度感測器監控環境溫度,使得溫度不會太高,導致烤焦衣服或燒毀發生不可預期的意外,再透過濕度感測模組,得知環境濕度判斷衣服是否吹乾,烘乾完成便會自動停止。
透過外部觸控模組判斷是否開啟電源,開啟繼電器導通馬達電源,啟動後,使用馬達移動加熱模組器,利用微動開關校正初始位置。
完成後,等待接收到開始按鍵的啟動指令後,開啟熱風模組及DHT22 溫濕度感測模組,掌控本作品執行烘衣上所需的溫度,做到調節溫度、風力強弱,避免造成衣物上的傷害。
經過DHT22濕度感測模組所偵測到的數值,回傳至MCU讀取分析衣物是否已經恢復到原本乾燥的參考數據,達到乾燥後,即啟動馬達,移動下一個還濕潤未乾燥的地方,最後移動至底後,及完成工作並關閉加熱模組器,回至初始位置。
作品結構
硬體架構
利用兩組相同長度的鋁擠,搭配滾珠螺桿與滾珠螺桿相同長度的鋁擠和光軸組成外觀框架,再使用兩組相同長度的鋁擠作為底座支撐,藉由滾珠螺桿結合步計馬達轉動放置平台,達到上下的移動功能。
使用步進馬達、皮帶及皮帶輪帶動,線性滑軌上固定熱風模組,可以在做到左右移動。再將底板固定在滾珠螺感及光軸上,使得熱風模組可以在框架內暢遊無阻。
使用MCU控制兩顆步計馬達,決定上下左右的移動,讓熱風模組可以到衣服需要吹乾的部分完成使命,在衣服後面裝置DHT22溫濕度感測器,利用風力將衣服吹向感測器,包覆DHT22的感測口處,創造較精密的量測環境。
硬體架構
觸控模組接收到按鈕訊號後,傳送給HT66F2390微控制器,做相對應的按鍵功能,開器馬達電源,控制步進馬達驅動器,驅動馬達做熱風模組位置的校正,碰觸到微動開關為歸零的基準,掌握熱風模組的位置,才能精準地控制後續移動,以免過頭空轉。
執行烘乾作業時,MCU即會開啟熱風模組的電源,進行對衣服的熱風輸送,再傳輸開始訊號給DHT22,使他回傳目前衣服的溫度、濕度來得知衣服的狀況,避免熱損傷跟沒把衣服烘乾的窘境。如圖一所示。
微處理器
HT66F2390 微控制器[1]的CPU 具有完全集成內部8/12/16MHZ 的震盪器,不需要外接元件,其工作電壓分別為2.2~5.5V、2.7~5.5V、3.3~5.5V,所有指令都可以在1~3 個指令周期內完成。
周邊具有58個雙向I/O接口,可以連接多個其他模組塊,做到整合、溝通、控制等功能;四個引腳與外部中斷口共用,可透過外部的訊號,更改當前緊要的處理事項;以及全雙工通用異步收發器-UART,方便用於基本的資料傳輸,連結其他藍牙、電腦、Wi-Fi等;16個外部通道,精準度為12bit的得A/D轉換器,以及MDU內建16bit對16bit的乘除法單元。
我們利用外部中斷I/O接上觸控模組,設立緊急停止鍵;使用乘除法器,處理DHT22 偵測環境溫溼度後,所回傳的數值,弄成標準格式,透過內部的硬體UART 傳輸至電腦,以方便分析,觀察DHT22 所偵測到的數據,對溫濕度的靈敏度,才能精準地控制溫度及濕度,完成烘衣的重要參考數據。
DHT22數字溫濕度感測器
DHT22溫濕度感測器裡面有一個電容式的感濕元件和一個NTC測溫元件,還有一個小型的的八位元單機片所組成,擁有極高的品質、超快響應、抗干擾能力強、性價比高等的優點。如圖二所示。
DHT22[3]的電源電壓為3.3~6V。接上電源後,需等待1s已越過不穩定狀態,期間不需要發送任何指令。DHT22偵測到的環境溫度、濕度的數值精度、環境的參數條件、響應時間、量測範圍等,如表一所示。
表一、DHT22溫濕度數據參數
|
參數
|
條件
|
Min
|
Typ
|
Max
|
單位
|
|
濕度
|
|
分辨率
|
?
|
?
|
0.1
|
?
|
%RH
|
|
?
|
16
|
?
|
Bit
|
|
重複性
|
?
|
?
|
±0.3
|
?
|
?
|
|
精度
|
25℃
|
?
|
±2
|
?
|
%RH
|
|
-20~80℃
|
?
|
?
|
±2
|
%RH
|
|
採樣週期
|
?
|
?
|
2
|
?
|
S
|
|
響應時間
|
?
|
?
|
<5
|
?
|
S
|
|
溫度
|
|
分辨率
|
?
|
?
|
0.1
|
?
|
℃
|
|
?
|
16
|
?
|
Bit
|
|
重複性
|
?
|
?
|
±0.2
|
?
|
℃
|
|
精度
|
?
|
?
|
?
|
<±0.5
|
℃
|
|
量測範圍
|
?
|
-40
|
?
|
80
|
℃
|
|
響應時間
|
?
|
6
|
?
|
20
|
S
|
數據格式: 40bit數據=16bit濕度+16bit?度+8bit驗證碼 例子: 接收40bit數據如表二。
表二、溫濕度數據格式
|
0000 0010 1000 1100
|
0000 00010101 1111
|
1110 1110
|
|
濕度數據
|
溫度數據
|
驗證碼
|
濕度高8位+濕度低8位+溫度高8位+溫度低8位=的末8位=驗證碼
例如:0000 0010+1000 1100+0000 0001+0101 1111=1110 1110
濕度=65.2%RH 溫度=攝氏溫度35.1度,當溫度低於攝氏零度時,溫度數據的最高位置1。
例如:-10.1℃表示為1000 0000 0110 0101
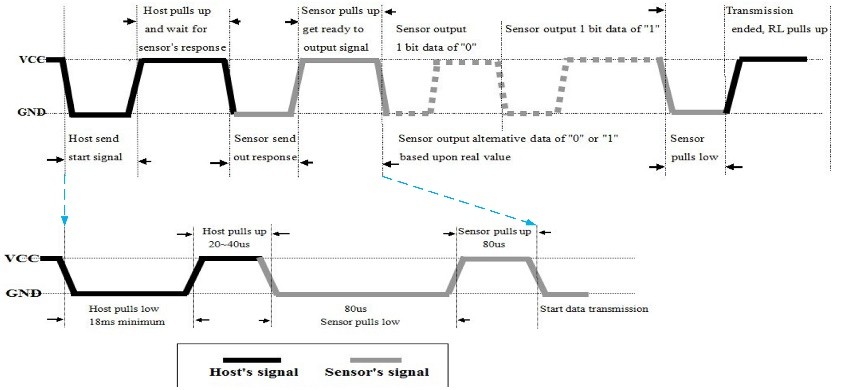
DHT22使用單一雙向傳輸接腳,利用MCU微控制器發出指定訊號搭配相對的時間,即可驅動DHT22,回傳所偵測到的數據,藉由相對應的時序來判讀01數值。如圖三。
A4988 步進馬達驅動器
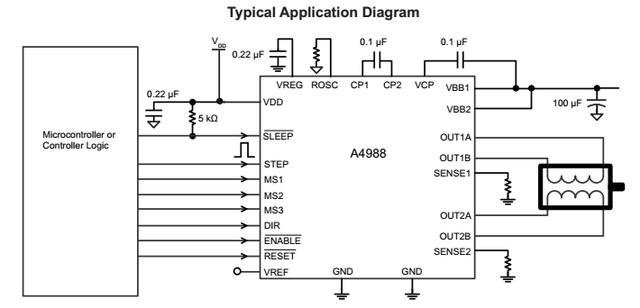
A4988[4]是一款完全的微步電動機驅動器,帶有內置轉換器,易於操作。該產品可在全、半、1/4、1/8 及 1/16 步進模式時操作雙極步進電動機,輸出驅動性能可達 35 V 及 ±1 A。A4988 包括一個固定關斷時間電流穩壓器,該穩壓器可在慢或混合衰減模式下工作。如圖四。
轉換器是 A4988 易於實施的關鍵。只要在「步進」輸入中輸入一個脈衝,即可驅動電動機產生微步。無須進行相位順序表、高頻率控制行或複雜的介面編程,如圖五。
將HT66F2390規劃好的輸出控制腳位,接上MS1、MS2、MS3五種步進模式,分別是全步進、1/2步進、1/4步進、1/8步進、1/16步進模式,如圖五所示。再接上STEP給他一個脈波,透過一次01的變化,即會轉動你所設定步進模式的一步,DIR可以控制轉動步進的方向,1代表正轉,0代表反轉,如表三。
表三、微步進模式
|
MS1
|
MS2
|
MS3
|
Microstep Resolution
|
Excitation Mode
|
|
L
|
L
|
L
|
Full Step
|
2 Phase
|
|
H
|
L
|
L
|
Half Step
|
1-2 Phase
|
|
L
|
H
|
L
|
Quarter Step
|
W1-2 Phase
|
|
H
|
H
|
L
|
Eighth Step
|
2W1-2 Phase
|
|
H
|
H
|
H
|
Sixteenth Step
|
4W1-2 Phase
|
NEMA17步進馬達
NEMA17[5]具有每相1.5A至1.8A電流,每相3至8 mH電感,保持扭矩為44 N·cm(62oz·in,4.5kg·cm)以上,每步1.8或0.9度(分別為200/400步/轉),如圖六。
BS83B04C觸控型Flash單晶片
BS83B04C[6]是一款具有8位高性能精簡指令的Flash單晶片,具有完全集成的觸控按鍵功能。觸控按鍵功能完全集成於單機片內部,無須外部元件。如圖七所示。內部具有看門狗定時器、低電壓復位等特性,外加優秀的抗干擾和ESD保護性能,確保單晶片在惡劣的電磁干擾環境下可正常的運行。
CPU特性具有 fSYS = 2/4/8MHz,工作電壓為 1.8V~5.5V,VDD=5V,系?時鐘為 8MHz ?,指令周期為 0.5μs,提供暫停和喚醒功能,以降低功耗,震盪器有?部高速 2/4/8MHz RC – HIRC,?部低速32kHz RC – LIRC,多種工作模式:快速、低速、空閒和休眠。
熱風模組
工作電壓為110V,具有1000W的功率、風量為0.8m3/分,溫度兩段式變化、風量強弱選擇。如圖八所示。
硬體流程圖
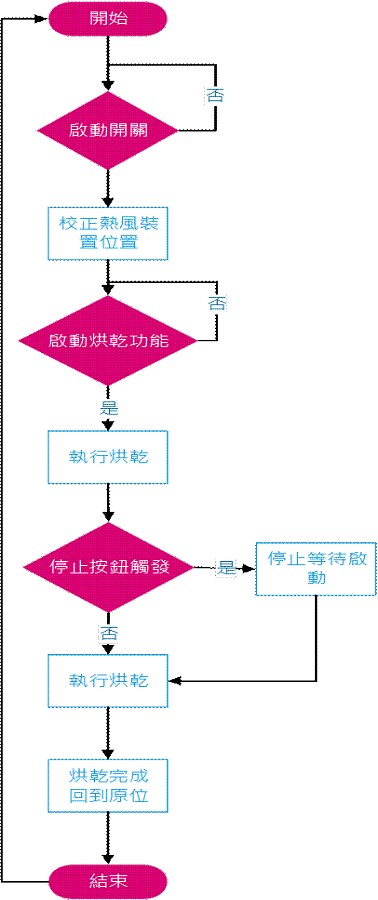
經由觸控模組的按鍵操作所有動作,開關上電,校正模組位置,啟動烘衣行程,還有強制停止鈕,可以讓你想讓他停的時候停,如圖九示。
軟體流程圖
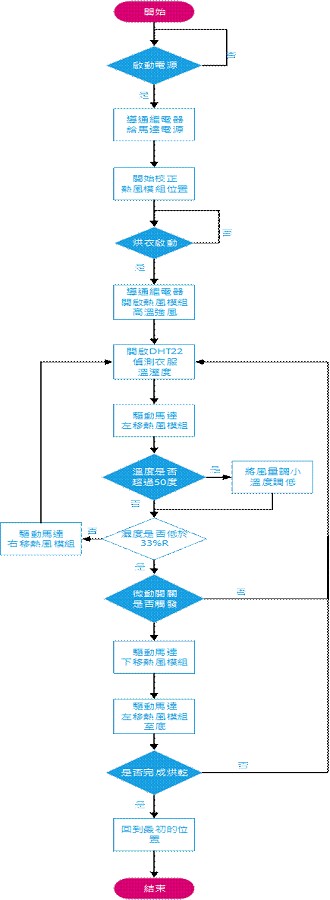
利用微動開關實現模組位置校正,在開始烘衣行程後,利用DHT22作為判斷當前烘衣的區塊是否烘乾了,得以繼續下一區塊的烘乾作業,以右邊的微動開關觸發,為完成橫軸的作業的依據,可以向下移動至下個橫軸的行程。如圖十所示。
測試方法
測試驅動步進馬達
先利用步進馬達驅動器,接上馬達後,去否會轉動,將MS1、MS2、MS3接為H、H、L再透過MCU給STEP一個1600次的脈波,觀察轉動狀況。
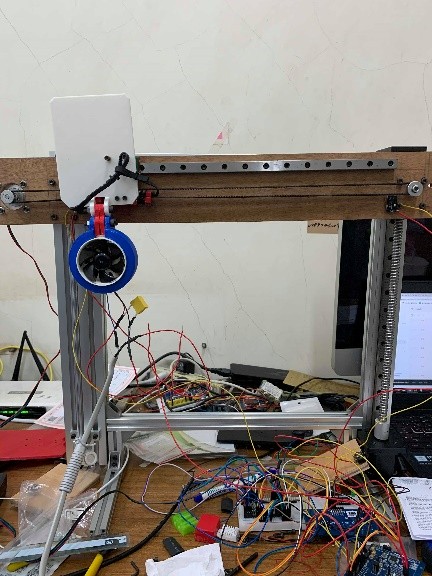
確認轉動正常後,接上皮帶、皮帶輪,掛上熱風模組,確認向左轉、向右轉是否正常動作。如圖十一、十二所示。
測試步進馬達帶滾珠螺桿
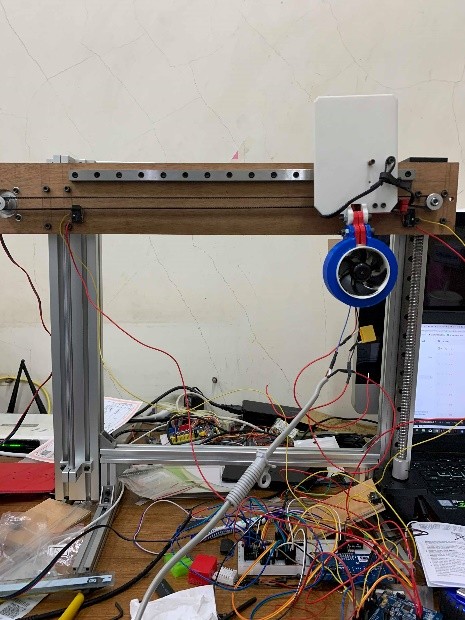
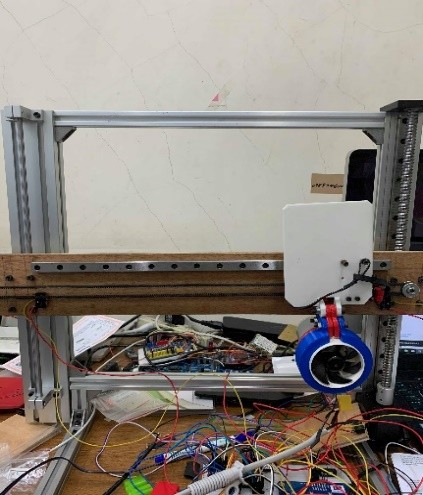
測試馬達帶動滾珠螺桿上的放置平台是否正常運作,需不需要挑整步進馬達微步間隔,來帶動平台上的負載。如圖十三所示。
DHT22溫濕度測器數值
開啟DHT22溫濕度感測器後,使用我們的熱風模組對著濕衣服吹向感測器,使衣服貼近我們的偵測口,觀察溫度是否有上升,濕度是否有下降,以達到我們烘衣的功能。
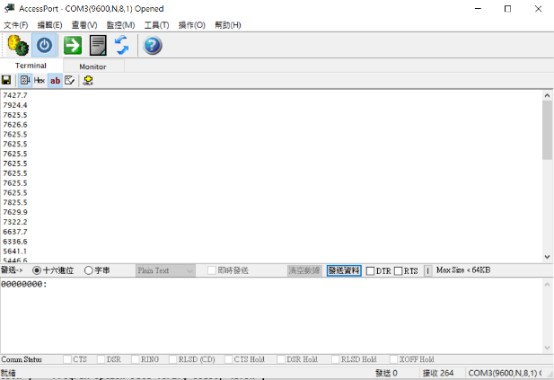
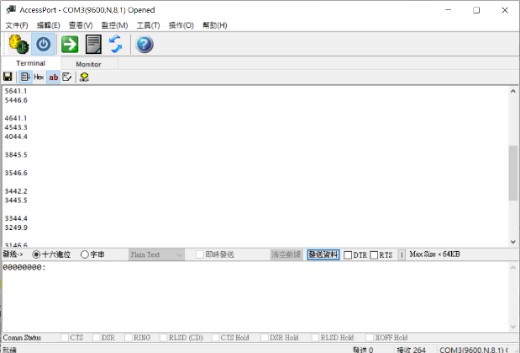
再將DHT22感測器所偵測到的數值,利用UART傳至電腦顯示,以方便我們觀察述職的變化。前兩位為濕度,單位是%R,後兩位加一位小數為溫度,單位是℃,如圖十四、十五。
結論
我們使用DHT22溫濕度感測器作為主要數據的參考來源, 經過測試,可以精準地 得知衣服的溫度以及乾燥程度,利用 MCU來操控周邊設備,配合步進馬達的轉動,帶動皮帶,使得熱風模組 可以 靈活 的 移動 ,這部分乾了,就換下個地方 ,實現我們智能烘衣,讓你可以 騰出雙 手,等待衣服烘乾即可。
(本文作者林華川1、陳勝君2為國立虎尾科技大學光電工程系1教授、2學生 )
參考資料
[1] Holtek Semiconductor Inc. HT66F2390,https://www.holtek.com.tw/documents/10179/116706/simHT66F2350_60_70_90v160.pdf
[2]衣物烘衣機溫度,http://www.comenb.com/21735.html
[3] DHT22溫濕度感測器,https://cdn-shop.adafruit.com/datasheets/Digital+humidity+and+temperature+sensor+AM2302.pdf
[4] A4988驅動器,https://kknews.cc/zh-tw/news/jj8mzxe.html
[5] NEMA17步進馬達,https://www.mouser.tw/datasheet/2/670/nema17-amt112s-1375041.pdf
[6] BS83B04C觸控型Flash單晶片,https://www.holtek.com.tw/productdetail/-/vg/BS83B04C