自行車功率計是一種測量健身自行車騎行者功率輸出(以瓦為單位)的儀器,作為訓練輔助工具,此類功率計可向騎士提供有關其運動量的回饋資訊,例如騎士可以設定在上坡期間保持至少200 W功率輸出的目標,如果功率低於此值,騎士可以透過加快踩踏板速度或換至更高檔位來增加功率,功率通常顯示在自行車車把上安裝的主控單元上,功率計與計算和顯示功率的設備之間必須有無線連接。
為了測量功率,有必要測量施加到自行車傳動系統某部分的機械應變。惠斯通電橋電路中連接的應變片可用於測量機械應變,惠斯通電橋產生的訊號通常非常小,頻率非常低,因此,需要透過具有零漂移輸入失調電壓的高精度放大器將訊號放大。此外,功率計始終由電池供電,因此功率計的總電流消耗必須盡可能低。
MAX41400為一款低功耗、高精度儀表放大器,工作電源電壓範圍為1.7 V至3.6 V。此外,該元件具有軌對軌輸入和輸出。其提供8個輸入可選的固定增益設定。對於低頻訊號應用而言,由於其典型1μV的零漂移輸入失調電壓,成功消除了通常在CMOS輸入放大器中存在的高1/f雜訊。典型電流消耗為65 μA,關斷模式下電源電流降至0.1 μA。MAX41400採用1.26 mm × 1.23 mm、9接腳WLP封裝或2.5 mm × 2 mm、10接腳TDFN封裝。小封裝尺寸適合對於尺寸要求嚴苛的自行車功率計。
自行車功率計中的另一個關鍵IC是MAX32666微控制器單元(MCU)。這是一款基於Arm Cortex-M4的MCU,整合了藍牙低功耗(BLE)無線電。來自儀表放大器的訊號由MAX11108逐次漸近暫存器(SAR)類比數位轉換器(ADC)進行採樣,數位樣本無線傳輸到運行應用軟體的Android裝置,以計算功率並繪製功率圖形。
工作原理
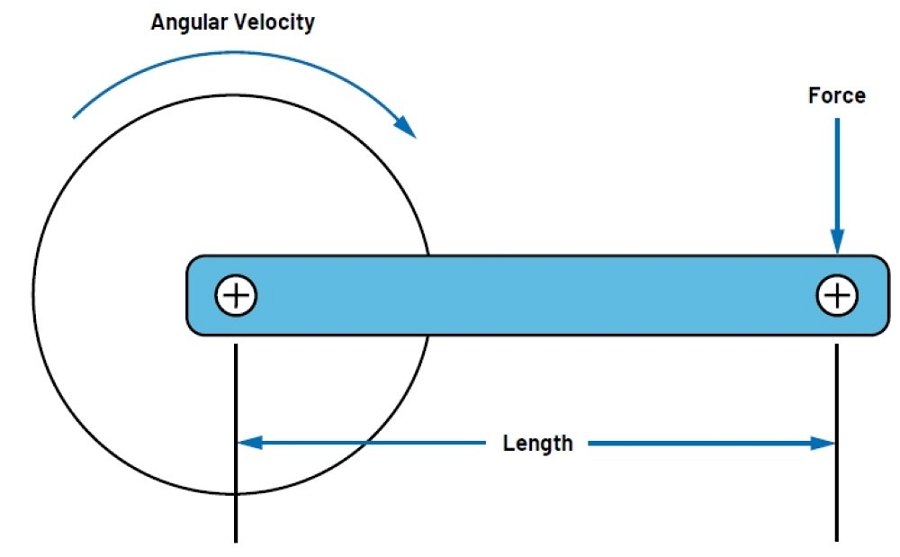
本文討論的自行車功率計測量自行車曲柄臂的彎曲應變。曲柄臂是一根杆,一端連接踏板,另一端連接底部支架。當騎行者踩踏板時,曲柄臂受力,並以一定的角速度旋轉(圖一)。以下討論功率計運行所依據的物理原理。
功是透過力傳遞的能量。力作用於物體,使物體移動一定的距離,這就是做功。所做的功W與物體移動的距離d和所作用的力F的關係由公式1提供。只有力向量在位移方向上的分量做功。
W=F x d (1)
使用國際單位制(SI)時,力的單位為牛頓,距離的單位為公尺,因此功的單位為牛頓米或焦耳。1焦耳等於1牛頓的力在1公尺的距離上所做的工作。
功率定義為工作的速率。其由公式2定義。
P= W / t (2)
P為功率,以瓦為單位;W為功,以焦耳為單位;t為時間,以秒為單位。
考慮扭矩和功率之間的關係,如果知道轉速(也稱為角速度),就可以計算功率。功率 = (力×距離)/時間。考慮自行車曲柄臂在t秒內轉一整圈。假設在整個旋轉過程中作用力是恆定的。力的作用距離就是半徑為r的圓的周長,其中r是曲柄從樞軸點到力的作用點的長度。
P = F x 2πr / t (3)
F × r為扭矩,記為τ;一個完整的圓有2π弧度,因此2π/τ為角速度,記為ω。公式3可以改寫為公式4。
P = tw (4)
因此,為了計算功率需要兩個量:扭矩和角速度。扭矩就是力與曲柄臂長度的乘積,是一個常數,因此我們需要測量作用力和角速度。請注意,只有力向量的切向分量對功率有貢獻,因為其是力向量中唯一工作的分量。
推導中做了一個簡化,即在曲柄臂的旋轉過程中,作用力是恆定的。但是,實際情況並非如此。例如,當曲柄臂垂直時(如果把曲柄臂看成時鐘的分針的話,就是6點鐘或12點鐘位置),力的切向分量將為零。此時力的徑向分量最大,但徑向分量不工作。當曲柄處於水準位置時(即3點鐘或9點鐘位置),力的切向分量最大。表示在整個旋轉過程中,扭矩會連續變化,因此我們需要在旋轉期間多次對力進行採樣。
本文討論的自行車功率計安裝在左側曲柄臂上。我們僅測量一條腿消耗的功率,並假設另一條腿消耗的功率平均值與前者相同。我們將從功率計獲得的功率讀數乘以2,以計算騎行者的總功率輸出。更複雜(且昂貴)的功率計可單獨測量每條腿的功率。
力透過應變片來測量,角速度透過慣性測量單元(IMU)陀螺儀來測量。然而,為了節省功耗和成本,本文稍後將討論一種替代技術,即透過處理應變片訊號來推導角速度。
力的測量
載荷力導致曲柄臂發生機械變形,在本例中為彎曲。傳動系統的其他零件(例如穿過底部支架的主軸)將發生扭轉應變,某些型號的自行車功率計會利用此種應變。
測量應變的標準方法是使用一種稱為應變片的感測器。應變片是嵌入柔性材料中非常細的長金屬絲。將應變片貼在我們要測量應變的物體的表面。應變片的方向取決於我們希望測量的應變類型。
當物體變形時,應變片中的金屬絲會被拉伸或壓縮。當金屬絲被拉伸,會變得更長更細。金屬絲的電阻與橫截面積成反比,與長度成正比,因此金屬絲的這些變形都會導致電阻變大。而當金屬絲被壓縮,會變得更短更粗,進而導致電阻變小。未變形的應變片具有一定的標稱電阻,標準值為120 Ω、350 Ω和1 kΩ。當應變片被壓縮或拉伸時,電阻會在其標稱值附近略微波動變化。本文中的自行車功率計使用1 kΩ應變片,以便儘量減小流經惠斯通電橋的電流。
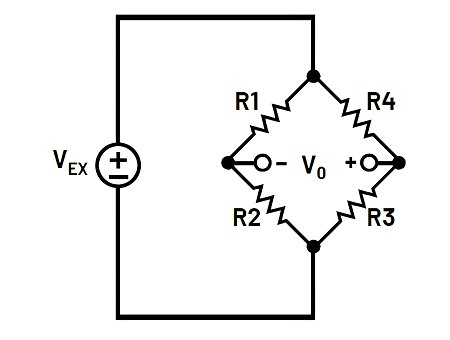
為了測量如此小的電阻變化,通常會使用一種稱為惠斯通電橋的電路(圖二)。
該電橋由兩個並聯的分壓器組成。電橋的頂部和底部之間施加一定的激勵電壓VEX。輸出電壓為圖中所示的Vo。輸出電壓的計算公式如下所示。
Vo = (R3 / R3+ R4- R2 / R1 + R2)x VEX (5)
如果電橋是平衡的,即R4/R3 = R1/R2,則Vo = 0 V。在所謂的四分之一電橋配置中,四個電阻中的一個被應變片取代。假設R4被Rg取代。當R4值改變時,電橋變得不平衡,差分電壓Vo變成非零值。
本文討論的功率計使用半橋配置,其中R4和R3是應變片,R1和R2是虛擬1 kΩ電阻。使用兩個應變片而不是一個,可以使電橋輸出的訊號幅度加倍。此外還能提供溫度補償。溫度也會導致應變片的金屬絲膨脹或收縮,進而影響電阻,這種變化與機械應變無法區分。然而,由於兩個應變片非常靠近且溫度相同,因此與溫度相關的電阻變化會相互抵消。
系統描述
完整系統包括:安裝在左曲柄臂上的小型窄體PCB,貼在曲柄臂上的應變片,以及Android裝置,例如智慧手機或平板電腦。Android裝置透過BLE從PCB接收原始資料,然後計算並顯示功率。
圖三顯示了PCB的架構圖。
整個PCB由一枚CR2032紐扣電池供電。在電池的使用壽命期間,電池的標稱3 V電壓會發生變化;隨著電池電量逐漸耗盡,此電壓會逐漸降低。ADC和儀表放大器的基準電壓以及電橋的激勵電壓都需要穩定、精準受控的電壓,因此我們使用 MAX17227 升壓轉換器將原始電池電壓升壓至3.8 V。電橋的3 V激勵電壓和ADC基準電壓由MAX6029基準電壓源利用3.8 V電源產生。所有IC的3.0 V電源電壓均由 MAX1725 LDO穩壓器產生。.
MAX41400 儀表放大器將電橋輸出的差分電壓放大並轉換為單端電壓。連接到儀表放大器REF輸入的分壓器提供1.5 V基準電壓。放大後的應變片訊號由MAX11108 ADC進行採樣。這是一款具有串列周邊介面(SPI)的12位SAR ADC。角速度由微機電系統(MEMS)IMU中的陀螺儀測量。IMU由MCU透過I2C介面控制。
MAX32666 MCU運行的韌體控制電路的週期供電,然後採集ADC和IMU樣本,並將這些資料放入BLE數據封包中進行週期性傳輸。
盡可能降低功耗
PCB上的整個電路/晶片的運行和休眠以一定工作週期進行,以充分降低平均功耗。用於檢測力的採樣速率為25 Hz。MCU每40 ms從深度睡眠模式(該模式下大部分內部電路處於關斷或低功耗狀態)喚醒一次。
然後,韌體將各種類比元件從低功耗狀態喚醒。例如有一個MOSFET電晶體與應變片電橋的激勵電壓串聯,充當開關。當電橋不使用時,該電晶體會切斷流過電橋的DC電流。電橋相當於3 V和GND之間的1 kΩ電阻,因此當開關閉合時,將有3 mA的DC電流流經電橋。此電流若一直存在,會大幅增加總平均功耗。
儀表放大器有一個關斷輸入接腳,該接腳透過MCU的通用輸入/輸出(GPIO)進行控制。除了對力訊號進行採樣的短暫時間外,儀表放大器處於關斷狀態。類似的狀況,在對力訊號進行採樣並讀出值之前和之後的時間裡,ADC一直保持低功耗狀態。為使ADC在低功耗和活動狀態之間轉換,需要寫入SPI命令。
最後是儘量降低IMU電流消耗。由於僅使用陀螺儀而不使用加速度計,因此加速度計始終保持低功耗模式。陀螺儀僅在擷取和讀取樣本所需的極短時間內處於活動狀態,其餘時間處於低功耗狀態。此外,角速度僅以1.6 Hz的速率進行採樣。
本文稍後將展示IMU可以完全省去,進而節省更多功耗。在完成對力和可能的角速度的採樣並存儲樣本後,MCU就會返回深度睡眠模式。累積了一定數量的樣本後,MCU將其打包成BLE數據封包並進行傳輸。當電路板不使用時,與電池串聯的滑動開關會將電池與其餘電路斷開。
當使用IMU且電路板運行時,3 V電源下測得的平均電流消耗為760 μA,因此平均功耗為2.3 mW。這是包括惠斯通電橋在內的整個系統的功耗。CR2032電池的典型電量為225 mAh,因此其工作壽命約為296小時。如果移除IMU,則3 V電源下的電流消耗降至640 μA,平均功耗為1.9 mW,CR2032電池的工作壽命將是352小時。
角速度估算
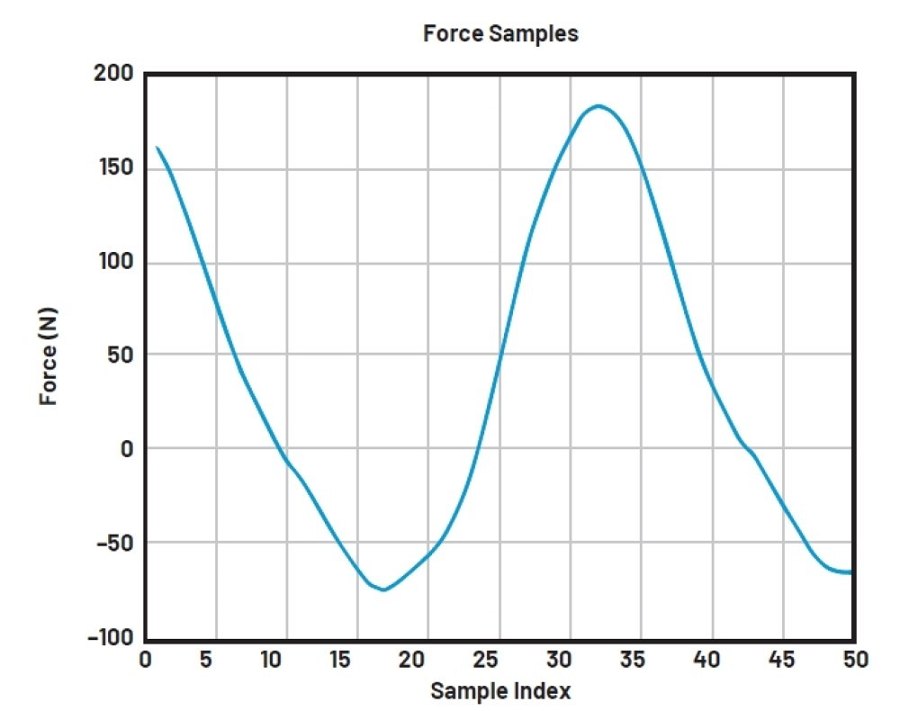
圖四顯示轉一整圈所測得的作用於自行車曲柄臂的力的切向分量(以牛頓為單位)。當曲柄臂旋轉時,作用力的切向分量週期性變化。
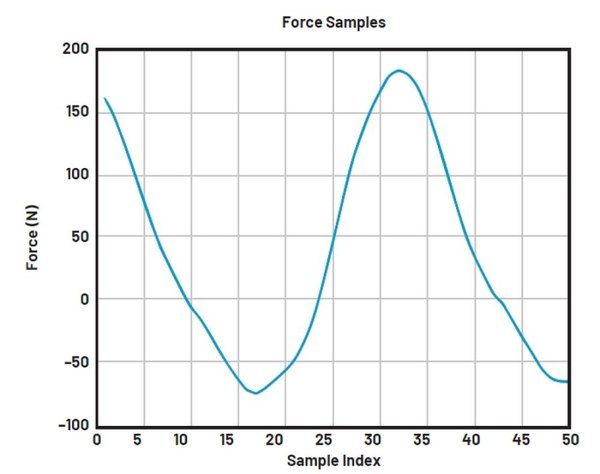
| 圖四 : 曲柄臂上的力與時間的關係(40 ms採樣間隔) |
|
原則上,可以透過對力訊號進行訊號處理來計算角速度。訊號處理演算法利用MATLAB進行編程。基本方法是取一個由連續的力樣本組成的向量,然後用公式6所示的正弦函數來擬合。
y = Asin(wx + Φ) + B (6)
A是幅度,ω是角速度,Φ是相位,B是偏移量。
優化成本函數由公式7提供。這是最小二乘成本函數,其中?是實測資料點的向量,y是公式6的輸出。
C = ?( ? - y)2 (7)
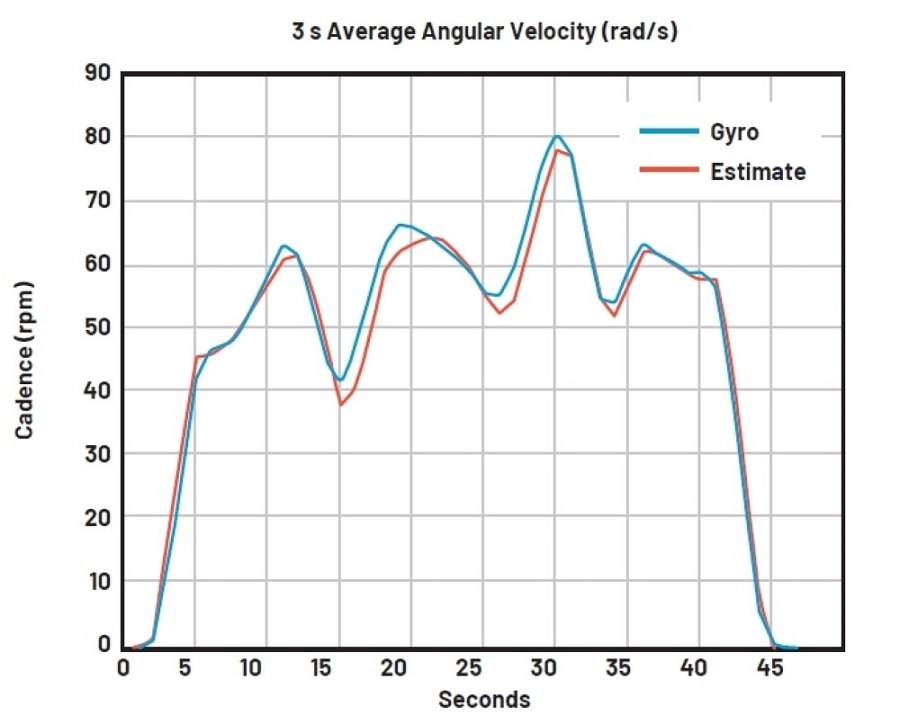
為使公式7中的C值最小,利用MATLAB最小搜索非線性規劃求解器來求得A、ω、Φ和B的值。我們只使用求得的ω值,而不使用其他值。估算當前樣本向量的ω之後,採集下一組連續樣本並重複該過程。在極少數情況下,最小化搜索無法收斂,並且成本遠高於正常水準。在此種情況下,丟棄計算出的ω值,而使用先前的值。
為了驗證這一概念,使用BLE嗅探器擷取自行車運行期間傳輸的一系列數據封包。數據封包中包含角速度和力的樣本。利用MATLAB腳本擷取數據封包的內容並進行後處理。圖五中繪製了每分鐘的估計踏頻(以轉數為單位),並將其與陀螺儀指示的踏頻進行了比較。
能量測量
騎士所做的機械功就是功率對時間的積分,因此存在足夠的數據來計算其消耗能量。應用軟體對功率隨時間的變化進行數值積分,得出以焦耳為單位的機械功。所得值乘以轉換係數,便可將焦耳轉換為千卡。假設為了做一焦耳的功,騎行者需要消耗四焦耳的化學能,那麼將機械功乘以比例因數4,就能估算出騎行者消耗的千卡能量。
結論
本文介紹低功耗、高精度MAX41400儀表放大器的力感測應用,具體而言是自行車功率計。將低功耗MAX32666 MCU與數個電源管理IC組合使用,構成的解決方案的平均功耗僅為2.3 mW。
(本文作者Andrew Brierley-Green為ADI工程師)