隨著科技與經濟日益,車輛數量不斷增加,伴隨而來的竊 盜案一 件又一 件的發 生,防 不勝防,因此防盜器漸漸成為不可或缺的附件。目前市售的防盜器在車體是否被竊盜或破壞的判斷上有所誤差,容易誤觸警報器而引起不必要的誤會,一般防盜器也只能讓車體發出警報聲,卻無法立即通知不在車輛 附近的車主,做出立即的反應。
作品融合現代科技技術,將體積縮小、降低成本與耗能,讓作品能夠更廣泛運用到更小的車體上, 例如腳踏車及寵物狗的項圈上,並且增加緊急呼叫功能,用在拐杖或是小朋友的隨身物品上,可以主動的觸發警報。而在導航端,因現在人手一機,所以結合智慧型手機作遠端控制,使作品能更貼近人性化、實用性、低成本及高準確率的目標,希望能降低竊盜意外的風險,保障使用者的財產,為生活安全盡一份力。
市售的防盜器大致上可分成三種,機械式防盜、電子式防盜與GPS防盜,由於GPS防盜器價格昂貴,因此本作品以電子式防盜器為基礎,加以設計改進其缺點,並結合機械式的優點(價格便宜)與GPS的優點(精確且可回傳資料),讓原本屬於電子防盜器的作品更加普及實用。
前言
目前市面上的車輛防盜器大多數容易誤判形勢,導致產生不必要的噪音,造成使用者與周圍的人的困擾,而且大多數是針對汽車而設計的防盜器,並不適用於自行車或體積較小之交 通工具,有鑑於此,本作品結合模糊控制理論研究出具有高精準度、低誤判率的防盜器,並致力於縮小體積、降低成本與耗能,使其能適用於體積較小或無額外供電系統的交通工具,且具備斷電警報功能,即使防盜器本身被破壞或拆除,遙控器端仍然會發出警報,大大的降低了被竊盜的可能性。
作品主要有五個功能:遠端監控系統、定位尋車系統、防盜系統、緊急呼叫功能及導航照明系統,利用無線傳輸技術,可透過導航器開啟或關閉各功能;定位尋車系統開啟時,導航端會傳送一個指令給防盜端並防盜端發出聲響和閃爍燈號,當防盜系統開啟時,微控制器會指示模糊控制系統開始判斷由加 速度感測器傳來數值,並適時的發出警報,如開啟無線網路監控系統,導航端與防盜端會不斷互相傳送密碼給對方,在接收不到密碼時表示已離開通訊範圍,會馬上發出警報,當遭遇危險則可按下緊急呼叫,導航端會藉由藍牙傳送訊號通知手機發出訊息求救,而導航照明是藉由電子羅盤的磁北極方向與GPS提供的經緯度或是利用手機提供的目標經緯度資訊進行定位,再經由 LED燈進行導航。
作品使用盛群微控制器--HT66F70A作為主要的微控制器,其功能如下:
I/O port:LED 狀態顯示燈與警報蜂鳴器。
Timer:模糊控制系統的時間參數。
Interrupt:觸發警報時的中斷。
ADC:三軸加速度感測器的類比轉數位。
UART:發送與接收藍牙及 Zigbee 無線通訊模組的資料。
SPI:接收由另外 IC 所接收的 GPS 訊號。
相對於市面上的防盜器,作品除了功能多樣化,更能精確的判斷出是否有竊盜行為發生,徹底改進電子防盜器容易誤判情勢發出警報的情況,而且由於無線網路監控系統屬於全雙工系統,即使偷竊者技術再高超,當離開監控範圍時,遙控端依舊會主動觸發警報,而不需要等待防盜器的指令才發出警報,因此作品的可靠度相當高。
工作原理
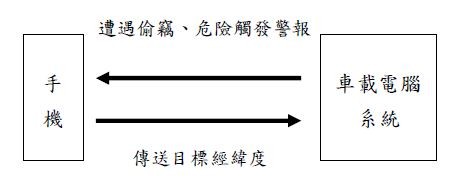
作品使用微控制器HT66F70A、三軸加速度感測器、GPS模組及Zigbee通訊系統,並結合智慧型手機及藍牙通訊系統,可分為導航端系統與車載系統兩部份。
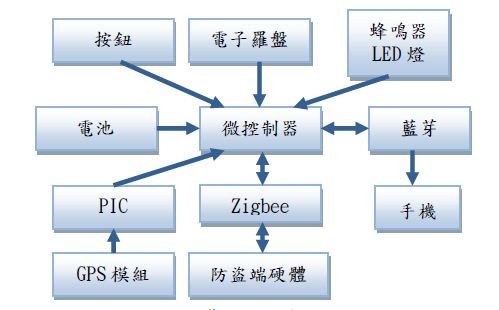
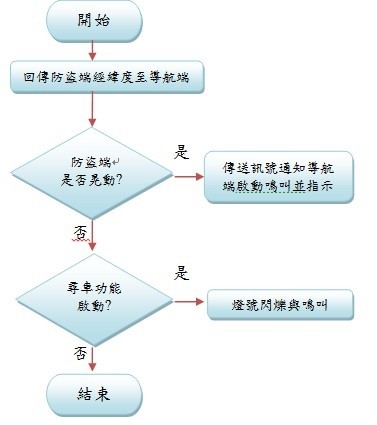
導航端系統
導航端系統配置主要設計有控制器HT66F70A、GPS 模組、電子羅盤、藍牙、Zigbee無線通訊模組與警報器。作品藍牙部分與智慧型手機的APP程式結合手機藍牙,搭配google地圖選擇其導航的目標地,Zigbee部分做為導航端與防盜端的聯繫用途,微控制器透過自身GPS模組接收的經緯度,與從手機或防盜端接收的經緯度作計算,再透過電子羅盤找出方位後,顯示於LED指示方位,再使用不同功能按鈕來控制,其控制按鈕分別為定位、防盜、快速尋車、緊急呼叫及導航功能。
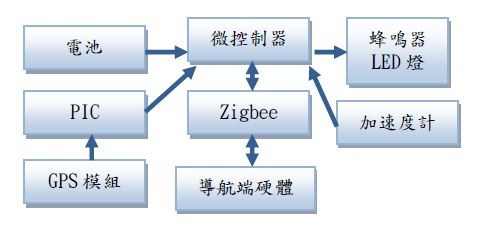
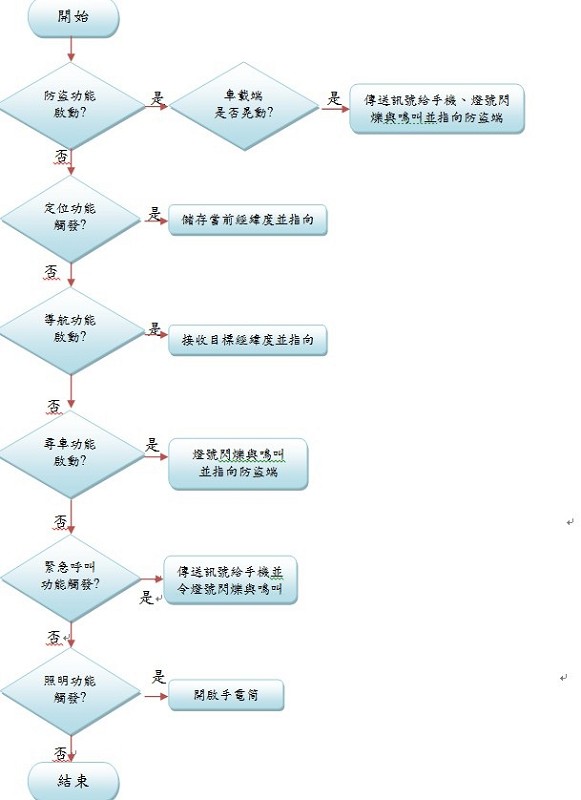
防盜端系統
防 盜 端 系 統 配 置 主 要 設 計 有 微 控 制 器HT66F70A、加速度感測器及 Zigbee 無線通訊模組與警報器。微控制器透過Zibee接收動作指令,分別開啟防盜與快速尋車功能。防盜功能主要透過加速度感測器的電壓訊號做為輸入值,接著由模糊控制系統判斷符合的實際狀態,判斷是否要觸發警報器。快速尋車功能由微控制器接收到導航器的啟動指令後,會持續從導航端往防盜端傳遞訊號,開啟車載端的蜂鳴器及燈號,令其持續發出聲響、閃爍燈號與回傳車載端之經緯度,讓使用者可循聲光及導航端指示迅速找回失物。
| 圖一 : 由模糊控制系統判斷實際狀態是否符合必須觸發警報器。 |
|
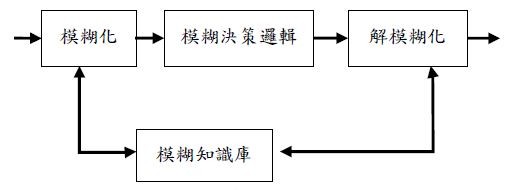
模糊控制理論
模糊控制系統其動作過程如圖二所示,其基本架構及設計步驟主要分為四個部分:
模糊化
模糊化為模糊控制器設計的第一步驟,即是將精確的輸入量轉化為模糊量。精確量經對應關係轉換為標準論域上的基本元素,在該元素上具有最大隸屬度的模糊子集,即為該精確量對應的模糊子集。
模糊決策邏輯
決策邏輯是模糊控制器的主要處理單元,也是整個控制器中的核心所在,其所具有的能力就如人類制訂決策的能力一般。決策邏輯可以在接收輸入資料後經由知識庫的輔助進而判斷出決定輸出的對應值。
模糊知識庫
模糊知識庫包括模糊控制器參數庫和模糊控制規則庫。模糊控制規則建立在語言變數的基礎上。模糊控制法則的建立及其控制策略,主要有四種產生法則:
a.由專家的知識和經驗獲得。
b.根據操作員的控制行為訂立規則。
c.根據被控制系統的特性定立法則。
d.藉由自我學習的方式獲得。一般的規則庫多以“if…else…” 此種語意陳述的條件法則來表示。
解模糊化
解模糊化基本上是將推理得到的模糊子集轉換為精確值,以得到最終控制量輸出以供外界系統使用。而整個工作細節是將推理引擎得到的結果,經由解模糊函數轉成一適當的非模糊數,在經由比例映射傳出,得到最終控制量,提供被控系統操作使用。一般最常使用解模糊化方法為重心法,本系統亦採取此方法, 重心法又稱為力矩法。
作品中利用模糊化,將加速度感測器偵測出來的加速度值依照大小,轉換成不同的變量,再將模糊化後的加速度值與持續時間的長短作為模糊決策邏輯用的參數做比對,並判斷出各種組合所對應的輸出,並在模糊知識庫中定義模糊決策邏輯作出判斷之不同程度的反應 (例如蜂鳴器的叫聲的不同),最後透過解模糊化將輸出轉成 LED 的亮光與蜂鳴器的聲響。
作品整體系統大致可分為 5 類:
1.無線網路監控系統:此功能主要是利用導航端與防盜端各別裝載的 ZigBee 無線模組建立無線監控網域,並透過防盜端與導航端之間的訊號傳遞判斷車輛目前是否於監控範圍內。若導航端或防盜端訊號中斷,則會觸發兩作品內部警報器。
2.快速尋車系統:使用者可透過導航端啟動此功能,此時防盜 端硬體會發出聲響、亮起提示燈並傳車輛的經緯度至導航端,導航端會指向車輛的位置,令使用者能夠快速尋得車輛。
3.防盜系統:使用者可透過導航端啟動此功能,此時微控制器會開始轉換由加速度感測器傳來的電壓值,並透過模糊控制系統判斷是否有遭竊盜的狀態反應,一旦判定為異常會告知導航端、手機及防盜端本身一同發出警報,防盜端亦會傳送經緯度至導航端,令使用者車輛狀態異常的同時能迅速尋找車輛位置。
4.緊急呼叫:使用者可透過導航端按鈕啟動此功能,主要為了避免使用者在路途中遭遇緊急狀況,而無力使用手機等求救裝置所設置的快捷按鈕,按下時,導航端會發出聲響及閃爍燈號,並透過藍牙傳送訊號通知手機向外傳送簡訊等訊息求救。
5.導航照明系統:使用者藉由按下作品按鈕開啟定位功能或導航模式,而導航模式則可藉由從手機設定目的地位置,令作品指向目標方位;定位模式則是儲存當前位置的經緯度當目標位置,並指示 方位以此避免迷失方向。
由於體積小、低成本與低耗能,使其能應用的層面不僅止於汽車,自行車或動力機械腳踏車等交通工具皆適用,且因結合了模糊控制系統,使其在判斷上更為精準,大大降低了誤判率,還有破壞警報功能,提升了安全性與可靠 性,讓作品更有市場競爭力。
作品結構
硬體部分
導航端的按鈕能啟動定位、導航、照明與緊急呼、防盜及緊急呼叫功能,並透過微控制器判斷是否要發出警報,藍牙與 Zigbee 無線通訊模式由於有傳送資料與接收資料,故為雙向傳輸,且作品致力於減少防盜器的總體積,在布線方面盡可能的減少面積,並使用體積較小的SMD系列元件,使體積縮小。
導航端硬體
導航端硬體架構圖如圖四所示,輸入為按鈕和藍牙,電力來源為5V乾電池,輸出方面有藍牙、警報蜂鳴器與高亮度 LED 燈。藍牙、GPS
模組及 Zigbee 利用 UART 通訊協定完成,PIC 與 HT66F70A 使用 SPI 溝通,其餘皆由 I/O 腳位 完成。
防盜端硬體
防盜端硬體架構圖如圖 五所示,而硬體端不設置按鈕,直接使其隨時傳遞 GPS 訊號至導航端備用,直到導航端按下尋車按鈕或是遭偷竊時開啟功能;加速度計利用 ADC 完成,其他使用的通訊協定同導航端硬體。
軟體部分
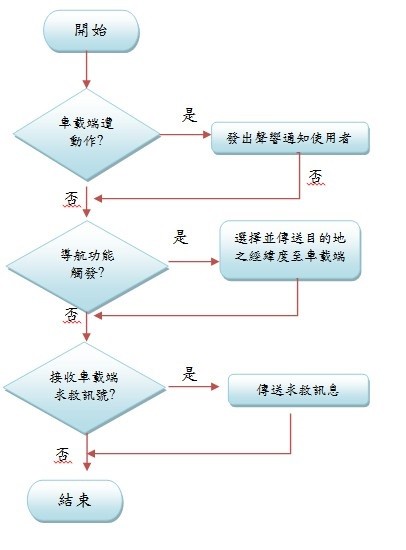
手機程式一開始檢查有無資料被傳送進來,當有任何一筆資料進來後便啟動相對應的功能並亮起狀態指示燈,手機程式流程圖如圖六所示。
防盜端程式在防盜功能開啟後便會驅使模糊控制系統判斷由加速度感測器傳來的資料是否有竊盜的狀態,若判斷為竊盜則發出警報,將回傳訊號通知導航端及手機。另外若緊急呼叫觸發會直接啟動警報器,並通知手機端傳送緊急訊息。
導航端程式一開始檢查五個開關有無被按下,當有任何一個開關觸發後便啟動相對應的 功能並亮起狀態指示燈,功能啟動中如再次按下相同的開關便會關閉功能,且會強制停止此功能造成的警報。
導航端與防盜端的警報功能為同步動作,但當其中一方在無線監控網路功能開啟且遭到破壞時,因作品具有全雙工系統,故另一方一樣能發出警報。此外每個功能可以同時啟動且各自皆能正常工作。
測試方法
尋機功能測試
由測試結果顯示當遙控器按下按鈕時,遙控器會發送開啟尋車功能的訊號,此時車載端接收到訊號後啟動功能並令燈號閃爍及鳴叫。
防盜功能測試
將車載端放置於自行車上,並將自行車擺放於路旁,測試砂石車經過或是施放炮竹所產生 的聲響是否會讓感測器造成誤判,而發出警報 聲,測試結果顯示上述情況並不會使加速度感 測器誤判而發出聲響,而當移動自行車時,則 會發出警報聲。
導航/定位功能測試
由於室內無法接收到GPS訊號,此測試需到室外完成,當導航/定位功能開啟時,測試結果顯示車載端會指向目標方位,原地轉圈或是四處走動亦會隨著面向的方位不同而隨著改變指向。
緊急呼叫功能測試
由測試結果顯示當車載端按下按鈕時,車載端會發送開啟緊急呼叫功能的訊號,此時遙控端接收到訊號後傳送求救訊息並令燈號閃爍及鳴叫。
(作者李榮全1、 詹志洪2、劉亞殊3、劉胤4、張育誠5為國立虎尾科技大學飛機工程系1教授、2-5學生)