頻率調變連續波(Frequency modulated continuous waveform;FMCW)雷達越來越流行,尤其是在汽車應用,如主動車距控制巡航系統(adaptive cruise control;ACC)。 一個FMCW系統的發射器發送高頻和大頻寬的線性調頻(chirp signal)訊號,所發射的訊號到達目標,並被反射回到接收器,其時間延遲(time delay)和頻率偏移(frequency shift)則取決於和目標之間的距離及相對的速度。
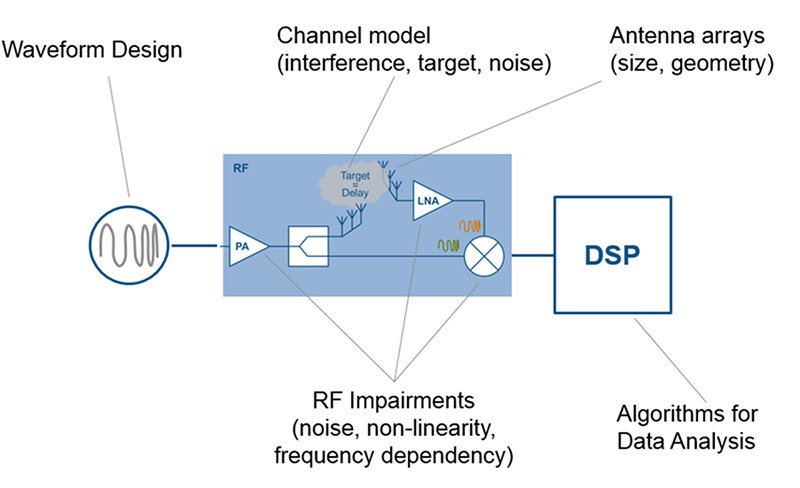
藉由混和發送和接收到的訊號,時間延遲響應到差頻(frequency difference)產生一個拍頻(beat frequency),這能對目標距離[1]進行非常精確和可靠的估計。 通常我們會使用多個天線進行空間處理和波束成形,因這可使偵測更加可靠或可形成一個定向系統(directional system),如圖1所描繪的。
圖說: 通道建模(干擾、目標、雜訊)天線陣列建模 射頻減損(雜訊、非線性、頻率依賴) 波形設計(範圍、解析度)資料分析之演算法
進行FMCW雷達的設計、建模和模擬,設計人員必須考慮的不僅僅是一般的行為, 在使用雷達方程式確定基本設計參數之後,設計者也必須分析RF前端所可能帶來缺陷的影響。 非線性、雜訊、頻率選擇性和元件運作超過超大頻寬之間的不一致性,都會減少偵測訊號的實際動態範圍。
藉由準確地建立RF前端模型,設計者可以進行複雜的硬體架構和數位訊號處理演算法之間的權衡(tradeoffs)分析。 此外,它們可以評估以前的設計實現是否可被重新使用,依增強的規格來重新定位雷達;或者現成的元件是否可以直接被用於前端的實現上。
FMCW波形的確定
當設計一個新雷達系統時,我們第一個必須要應付的問題是要確定三角啁啾波形(triangular chirp waveform)的參數,以達到特定範圍所需要的解析度,當我們考慮自動巡航控制時使用汽車遠程雷達,通常頻寬約佔77 GHz千兆赫[2] [3]。
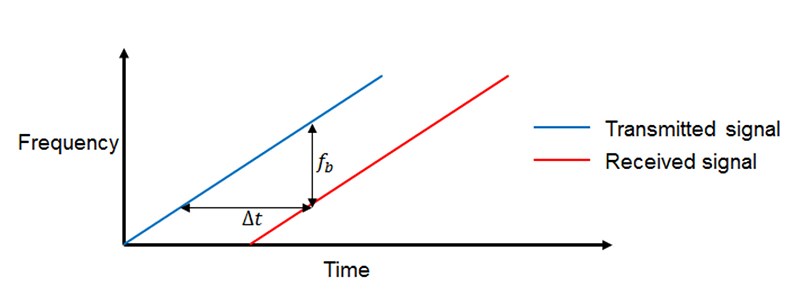
如圖2所示,接收訊號是一個傳送訊號之衰減及時間延遲的複製,其中延遲Δt和目標的距離相關, 因為訊號在任何時刻總是掃過一個頻帶;而頻率差值 fb ,通常被稱為拍頻 (beat frequency),其傳送訊號和接收訊號之間是恆定的,因為掃描是線性的,可以從拍頻得知時間延遲,然後再從時間延遲推估到目標的距離。
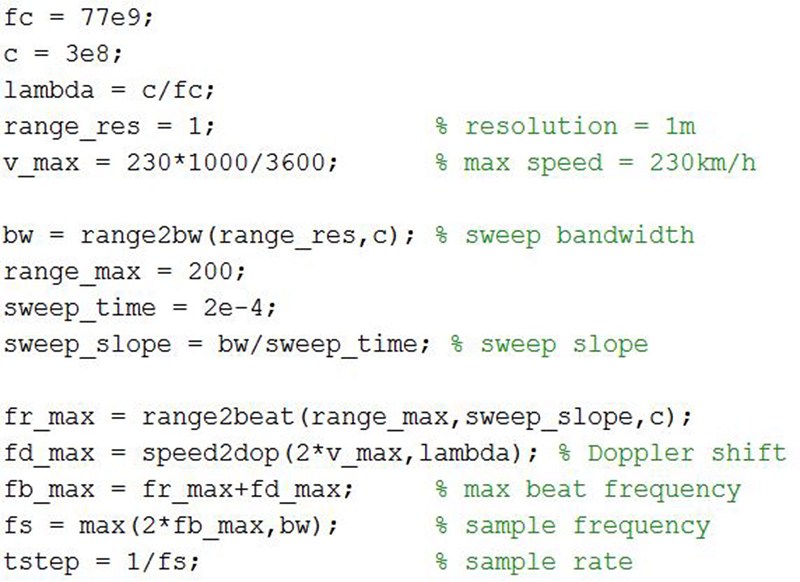
使用MATLAB和相位陣列系統工具箱(Phased Array System Toolbox)的功能,可以輕鬆地確定如圖3所示的77千兆赫雷達的基本波形參數,如掃描頻寬和波形斜率(slop)、最大拍頻和採樣頻率(sample frequency),根據使用者界定的距離解析度和最大速度等。
RF元件、雜訊和非線性之建模
一旦線性調頻參數已被確定,就可以繼續進行雷達系統收發器的建模。
雷達系統的前端包括發送器、接收器和天線,這些模型在相位陣列系統工具箱中都有提供, 我們可以參數化這些模型給定所需要的值,如相位雜訊和熱雜訊;或者,我們也可以使用Simulink中所提供的RF元件來建立發送器及接收器的模型,以及透過射頻模擬模組(SimRF)來建立元件層級之雜訊、非線性以及頻率選擇等模型的效果。
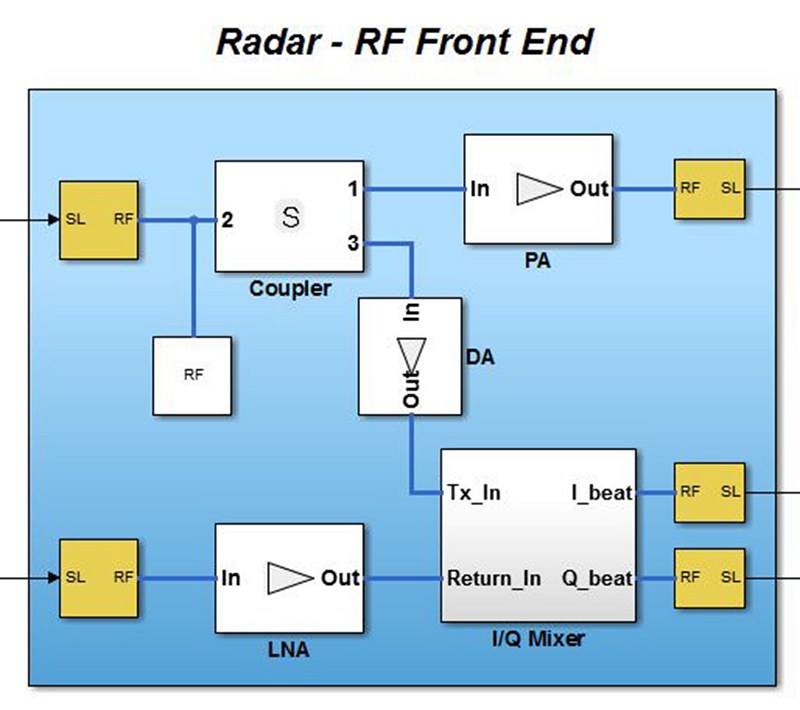
圖4顯示了我們如何使用射頻模擬模組(SimRF)工具之模塊來建立RF前端的模型;該函式庫提供一個內含求解器的電路,能快速模擬射頻系統和元件,例如放大器、混頻器和S參數模塊(S-parameter blocks)。
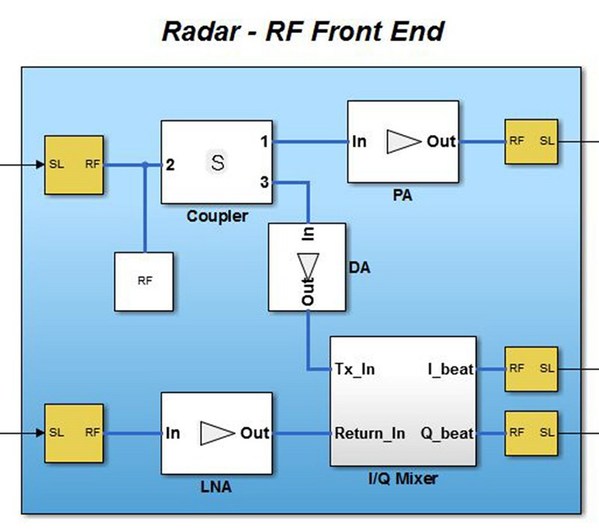
| 圖4 : 在Simulink中使用射頻模擬模組工具的電路模塊來建立RF元件模型。 |
|
我們可以詳細描述收發器的結構,並使用數據表給予每個前端元件相關參數,例如,I / O混頻器的直接轉換,如圖5的建模,該元件對接收的訊號進行解調,並與原始的發射波形相乘。
在I / O混頻器中使用的兩個乘法器的參數已經在模塊中直接設定,或者也可以使用工作區的變量。透過這樣的設置,使用者能很容易地嘗試及探索不同的設定,藉由使用不同的參數數據表來模擬現成的元件。
完整的系統模擬
當雷達系統的所有元件都已經正確的給予參數之後,可以進行一個完整的電腦桌機模擬,來測試系統是否會在不同的測試條件下正常運作。
當模擬運行中時,模型不僅能提供相對速度和物體之間距離的估計值,也能檢視發送和接收訊號的頻譜,如圖6。
在理想情況下(無雜訊和失真的)執行的第一個模擬顯示,使用中的所有目標其速度和位置都可以被正確地偵測到,這個模擬是為了驗證測試環境以及數位訊號處理的演算法;至於後續的模擬中再加入接收器非線性和雜訊之後,雷達就偏離了理想行為,不能偵測到汽車離遠的時候。
之後,我們再增加混合器的隔離和功率放大器的增益之後,雷達系統就能擴展其偵測的範圍,進行再次模擬時,即可正確地估計所述目標的速度和範圍。
因此,仔細權衡不同階段的增益以避免接收機的飽和操作是非常必要的,本模型允許我們使用不同的參數組來進行模擬, 它還可幫助選擇合適的雷達元件進行後續的實現,並驗證這些元件對雷達性能的影響。
結論
本文使用了一些以MATLAB為基礎的工具鏈,進行應用於汽車主動安全系統的完整的FMCW雷達系統之建模與模擬流程。我們 所提出的工作流程,能夠讓使用者在一個完整的系統級模型中模擬RF元件,其中包括數位訊號處理演算法。 這種方法能夠同時降低雷達開發以及複雜系統測試的時間,同時可使整個開發週期的成本更低。
(本文作者1-John Zhao、2-Marco Roggero、3-Giorgia Zucchelli任職於MathWorks公司1-產品經理、2-應用工程師、3-技術行銷工程師)
參考文獻
[1] Design and Verify RF Transceivers for Radar Systems. Giorgia Zucchelli, MathWorks. mathworks.com/videos/design-and-verify-rf-transceivers-for-radar-systems-81990.html
[2] Automotive Adaptive Cruise Control Using FMCW Technology. mathworks.com/help/phased/examples/automotive-adaptive-cruise-control-using-fmcw-technology.html
[3] Karnfelt, C. et al. 77 GHz ACC Radar Simulation Platform, IEEE International Conferences on Intelligent Transport Systems Telecommunications (ITST), 2009.