由於成本攀升但客戶需求縮減,同時加上產品種類增多,軍武系統快速地與其他工程領域一樣面臨著成本受限的問題。為有效率地驅動與控制這些飛行彈藥,必須運用微型控制制動系統(CAS)來針對尾翼進行精準的微幅調整,以及調整經過彈體的氣流。以往這些系統都是採用氣壓或透過電刷直流馬達與齒輪箱進行驅動,但現代馬達在無電刷直流馬達(BLDC)在內所達致各方面的進步,使得業界已經能做出更小、更輕、更廉價、更有效率的CAS設計。然而,其所付出的代價,則是為了要驅動BLDC的三個相位,導致系統複雜度提高。
導致複雜度提高主要有下列幾項因素:第一,傳統電刷直流馬達只需要一個H電橋,而BLDC則需要3對MOSFET來驅動相位。這不僅增加少量的成本,還會額外佔用電路板空間。在驅動這些MOSFET時,必須注意避免讓短路電流(current shoot)通過,因為如果頂部與底部都同時導通就可能會導致MOSFET損壞。另外還要注意在脈衝調變(PWM)頂部與底部驅動線路之間插入的空白時間(dead time)。
從軟體的角度來看,一般電刷馬達可透過簡單的PID迴路加以控制,而無電刷直流馬達則需要更先進的迴路與換相策略 - 通常是量測繞組電流、相電壓、轉子角度、以及速度。
無電刷直流馬達的構造
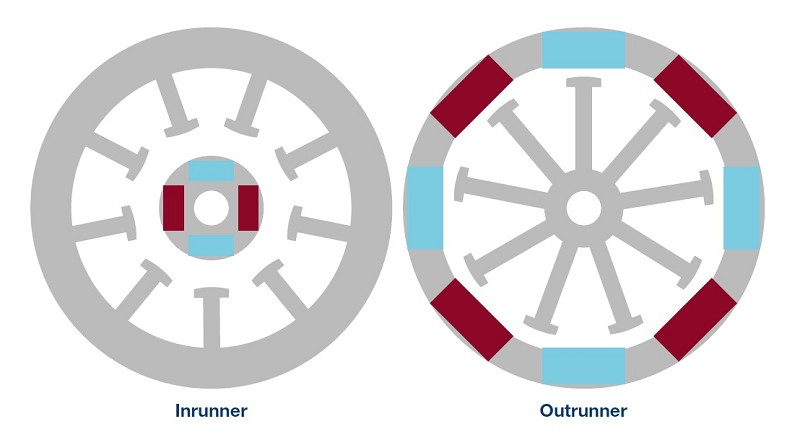
BLDC內含定子上的電磁鐵,以及可動轉子上的永久磁鐵。BLDC可以是內轉式(磁鐵位於線圈內)或外轉式(磁鐵位在線圈外)。圖1顯示BLDC內轉組件與外轉組件。在兩種類型中,都會有3個相位的導線環繞((U, V, W 或A, B, C)在定子的齒紋上。這些繞組會依特定順序進行激磁,藉以吸引與排拆永久磁鐵(標為紅/藍)
由於標準的微處理器或DSP並沒有電流驅動力足以直接激磁線圈,因此通常會使用涉及MOSFET(每相位2個)的電力反相階段,以用來將來自控制介面的PWM驅動力轉換成驅動馬達所需的高電壓驅動力。
一般三相反相器(phase inverter)使用6個N-Channel MOSFETs(圖2上方),產生圖2底部所示的切換階段。另外,還有多種切換階段沒有顯示在圖中: 001、010、011、以及101。這裡的1代表其中上方3個MOSFET其中一個被打開。這些階段對映到一個狀態空間表示式(state space representation),在圖3的6個感測器具有詳細的解說。藉由開啟與關閉這些開關,導入到繞組的電壓最高可達到2/3 × VDC。這種策略的自然延伸,就是針對每對MOSFET配置PWM。藉由改變PWM波形的工作週期,在繞組中產生的電壓就能生成種類眾多的電壓,實際數量端看PWM生成系統的解析度而定。
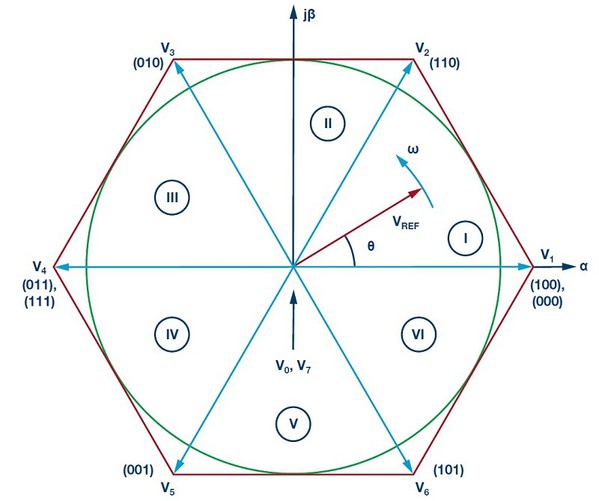
| 圖3 : 狀態空間的開關代表式,從Sector I一直劃分到Sector VI |
|
若沒有PWM,自然想到的換相策略就是直接依序激磁每對繞組(區塊換相或六步換相)。在這項策略中,每次拉高一或兩個繞組的相位,其餘繞組的相位則壓低。藉由依序激磁相位,轉子上的磁鐵就會拉至每個相位,然後轉子開始旋轉。為判斷該激磁哪些相位,通常會在定子上每隔60電角度(electrical degree)設置一個霍爾效應感測器。霍爾效應感測器能偵測每個轉子磁鐵,並產生一個三位元數位序列,用來判斷下個換相區域。
這種策略在低成本馬達控制系統運作得很好,但缺點是在低速下會有轉矩漣波(torque ripple)的問題。此外,轉矩漣波會造成噪音,而且若馬達用在定位/伺服等類型的應用則會產生位置誤差。
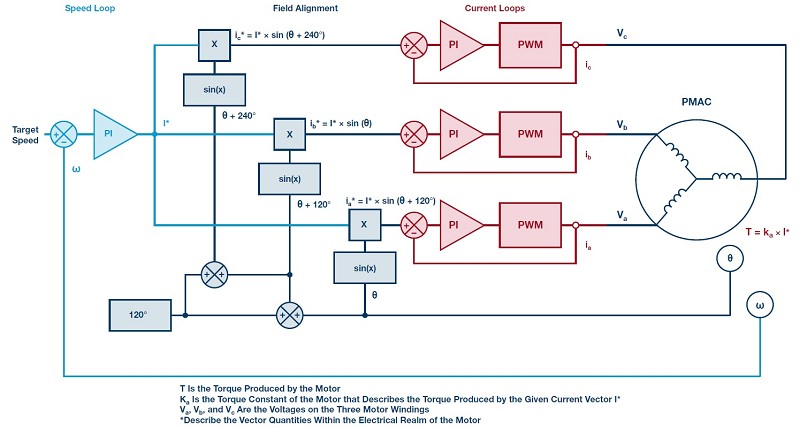
正弦波換相(Sinusoidal commutation)運作原理是讓定子電流對齊BLDC上定子的磁通量。這些電流的相位之間相位差應為120度。永磁同步馬達(PMSM)類似BLDC,但需要一個正弦波電流來執行驅動。
圖4的模塊圖顯示如何驅動一個永磁同步馬達。運用一個速度感測器進行簡單的速度控制,或是根據轉軸感測器與多個馬達參數進行推測。正弦驅動在低速時特別管用,但在高速時由於必須隨著速度提高而提高正弦波的頻率,也需要更高的電氣頻率。
在更高的速度下,馬達需要更高的轉矩,這對導致相位電流出現延遲。要在更高速度下妥善控制,一般要導入相位超前(phase advances),才能讓轉矩與磁通向量相匹配。
為克服這項問題,業界採用一種更先進的控制機制,稱為磁場導向控制(FOC)。和其他換相策略一樣,FOC也可以採取無感測器的模式,根據繞組產生的反電動勢(back-EMF),或是感測到的位置以及電流感測器來推算位置與速度。FOC的基礎是控制朝向馬達繞組的轉矩以及磁通量向量(flux vector)。這些向量的生成來自於馬達所需的速度輸入。
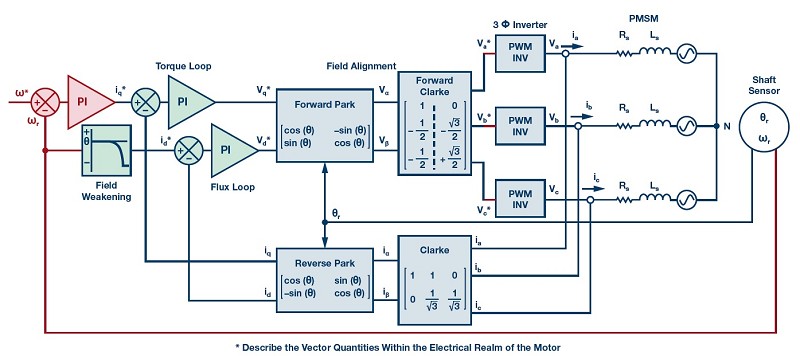
利用馬達的電氣與機械常數(慣性矩、摩擦系數、定子繞組的電感與電阻、以及反電動勢常數),圖5的PI迴路就能將所要的速度轉換成直流電數值。藉由控制馬達的電氣週期,這些數值就能轉換成轉子的參考座標系(圖6),進而利用派克轉換(Park transform)產生Vα 與Vβ。
FOC的下一步是把Vα 與Vβ 轉換成PWM數值,然後傳送到PWM反相器單元。這個過程通常會使用正弦波調變機制(SPWM)或空間向量調變(SVPWM或SVM)機制。
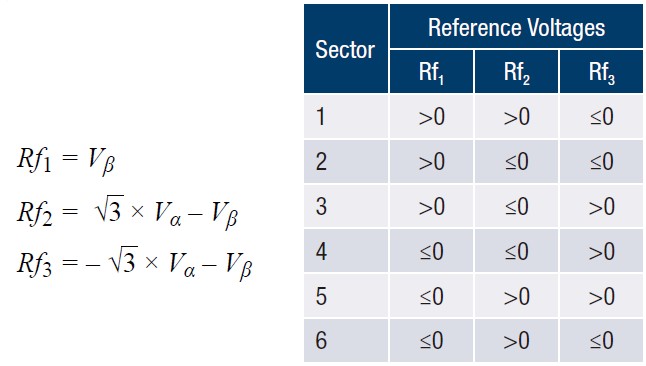
如先前所述,藉由控制電力反相器內MOSFET的切換,就能產生一個空間向量表述式,如圖3所示。鄰近單元向量之間的空間經過編碼,產生介於1到6的分區,對應到電氣換相週期的6個切換分區。圖3的Sector 1放大圖如圖7所示。電壓向量VREF 是由電壓向量Vα 與Vβ組成,θ角則是Vd 除以Vq的反正切。
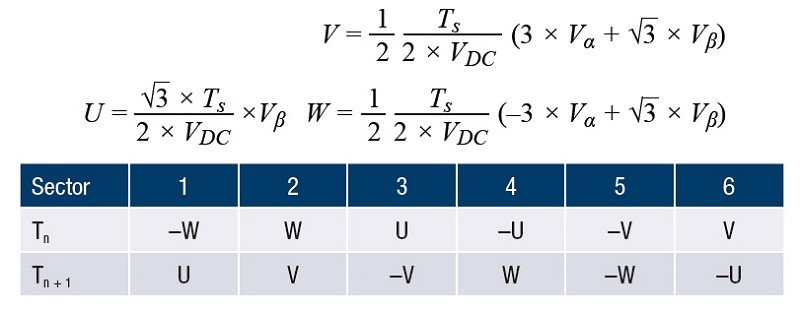
圖7顯示使用兩個鄰近單元向量(V1與V2)以及在每個狀態花一段特定的時間(對應到一個工作週期),就能推算出VREF 。這個工作週期的計算,可使用類似向量數學(參見圖8)的相關公式。
U, V, W 向量公式計算
從圖7的公式來看,PWM時間的推算,可使用正規化時間1.0(等於整個100%工作週期)減去Tn 與Tn+1。之後再透過額外的計算即可得到分區sector,如圖9所示。
算出工作週期並傳至控制器的PWM模組後,就已達到使用FOC進行開放迴路控制的目的。接下來必須整合回饋機制才能建構出閉路控制。如圖4所示,先量測三個繞組的電流,然後使用逆克拉克(inverse Clarke)與逆派克(inverse Park)轉換對三個繞組的電流進行量測與轉換。
要量測這些電流,可使用多種不同的策略:分流感測(shunt sensing)配合每個相繞組(phase winding);在三個MOSFET底部與接地端之間設置一個低側分流器;以及在每個MOSFET與接地端之間設置相位分流器;或是在每個頂部MOSFET與VDC之間設置高側分流器。
若設計受到成本限制,則使用兩個分流器搭配繞組將會是一種較好的量測方法,因為能直接量測兩個繞組電流。第三個電流可使用克希荷夫電流定律以及總和0的規則推算出來。這種方法額外的好處是電流可以在任何時間量測,不必侷限於MOSFET導通低部與頂部。在量測這些電流之後,可使用分流器系統可測到的最大電流,將量測數據正規化成[–1, +1]的範圍。
在位置與速度感測方面,可使用編碼器(相對型或絕對型)、霍爾效應感測器、檢出器或磁角感測器。不過依據感測器的解析度,有可能必須用到額外的位置與速度推算機制。不論採用哪種技術,量測到的角度都必須轉換成電角度,以便與制動轉子位置的換相進行同步化,以及執行轉子的轉換。角速度必須是已知數值,但這個數據通常維持為機械參數格式,以便對照所要的輸入速度。
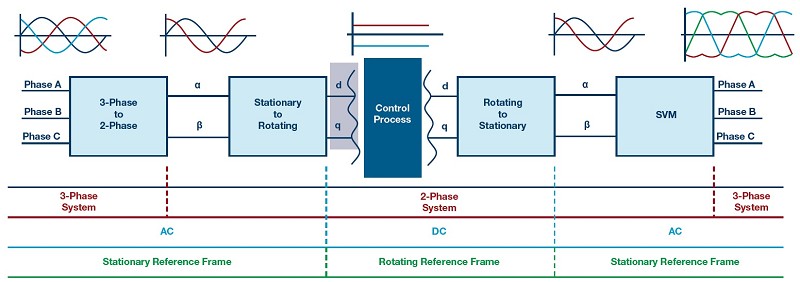
在得到轉子的實際位置與速度後,再互換/逆向派克與克拉克轉換,把靜止定子參考座標系轉換成d, q參考座標系中的旋轉參考座標系,藉此轉換相位電流。電流與速度誤差經由PI迴路產生誤差向量,然後回饋到順向派克與克拉克轉換,這些控制程序都可以重複。
這些程序在多長時間可再重複? 得看各項馬達特徵而異。PWM頻率通常會避開可聽音波的頻率範圍(15 kHz 至30 kHz),免得馬達產生聲響共振。FOC和所需的控制迴路與建置在PWM中斷服務常式,讓PWM的新數據可供下一個PWM週期使用。
然而這可能對FOC常式產生嚴苛的時序限制,因為花在為PWM中斷服務的時間,就無法用來服務控制處理器的其他部分(像是連結至PC程式的串列介面)。PWM頻率若為30 kHz,每個PWM的ISR僅有33.3 微秒的時間。因此每微秒都很重要!
另外,還應注意盡可能減少正弦與餘弦以及其他浮點運算的運算負荷。一般的作法是將FOC常式壓低在可用PWM ISR時間的50%以下,讓處理器能服務其他像UART週邊元件,藉以服務像是改變要求速度或設定新位置等較不重要的任務。
選擇元件
實作FOC本身就已經相當複雜,因此選擇適合的元件有助於減少系統整合方面遭遇的額外難題。Analog Devices針對馬達控制訊號鏈提供多種元件。這些元件包括閘極驅動器、絕對角度與霍爾效應感測器、電流感測器、以及各種隔離產品。
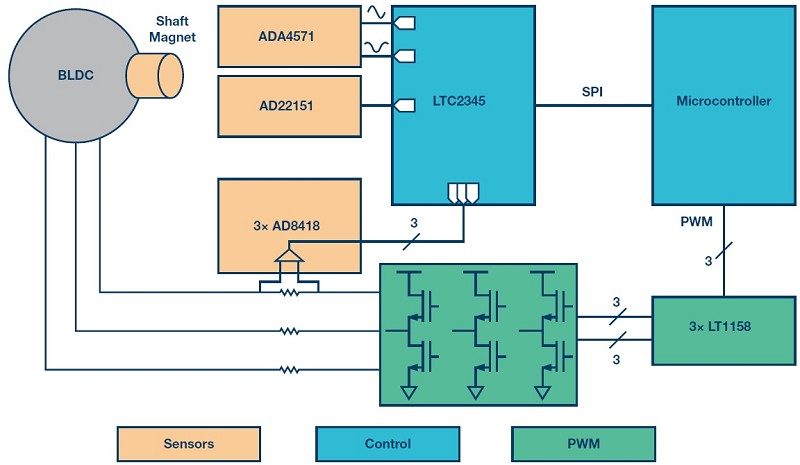
圖10顯示馬達控制訊號鏈元件的模塊圖。從高階概念來看,BLDC轉軸位置與速度的感測使用ADA4571 AMR 角度感測器以及 AD22151 磁場換能器(transducer)。相位繞組電流的量測,使用的是串聯電阻以及AD8418 電流感測放大器來移除PWM共模電壓。LTC2345-18 8× 18-bit ADC負責把感測器的6個類比電壓轉換成供微控制器使用的數位訊號。
微控制器利用這些訊號來計算PWM占空比,然後再傳到硬體計時器。LT1158 MOSFET驅動器扮演電力換能器中6個MOSFET的閘極驅動器。
LT1158是一款整合式半橋N-Channel MOSFET驅動器。它可供應5至30伏直流電力,輸入端PWM波形邏輯可搜尋TTL或CMOS訊號。此外,PWM輸入會轉換成高側與低側MOSFET驅動訊號,而晶片則會自動置入一個調適空白時間(dead time)。這意謂著PWM頻率可機動變換,系統也會自動插入空白時間以保護MOSFET,防止短路電流通過,但卻不必修改PWM計時器的程式碼或暫存器。
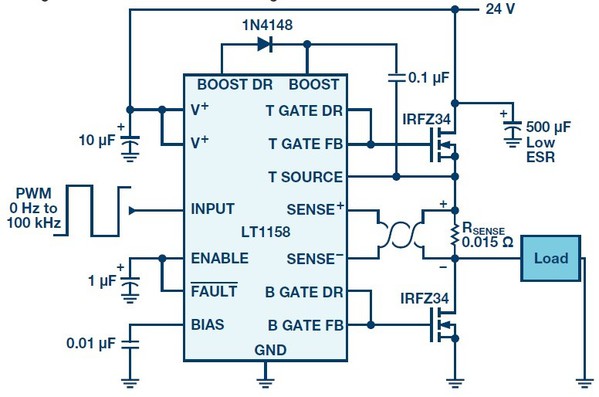
| 圖11 : LT1158 雙N-channel MOSFET 驅動器. |
|
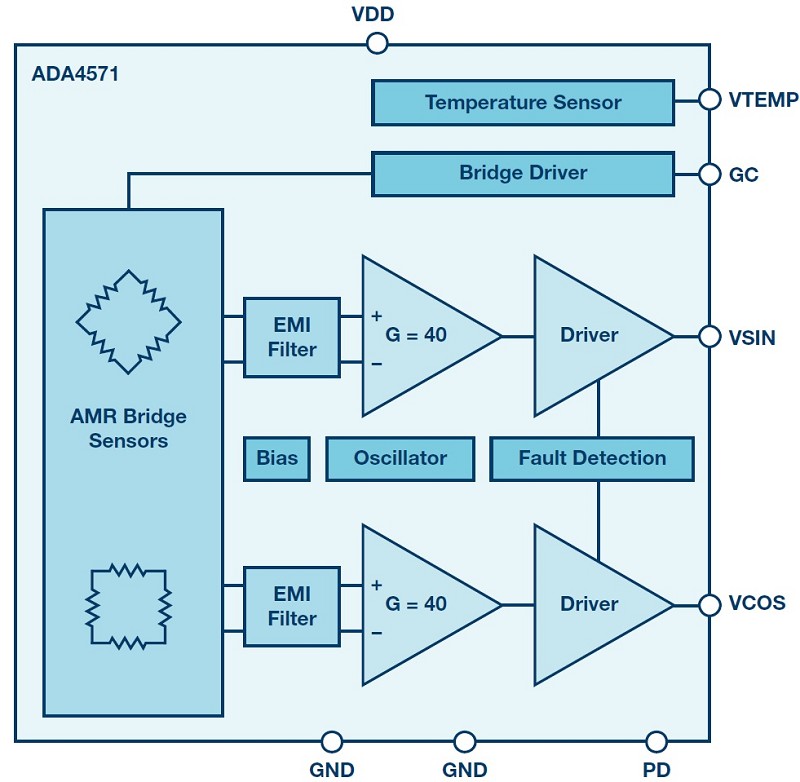
ADA4571 整合式非等向性磁阻(AMR)感測器能量測180度旋轉角度,誤差在0.5度內。在開啟溫度補償機制下,感測器可使用2.7至5伏電壓,消耗電流僅7毫安培。感測器輸出兩個類比正弦波(VSIN, VCOS),中間電壓為2.5伏(5伏電源)。一旦VSIN 與VCOS 數位化,它們即可透過一個簡單公式轉換成角度。
若要量測360度絕對旋轉,可採用ADA4571 搭配一個線性輸出磁場(霍爾效應)感測器,如AD22151。AD22151設計成使用5V電源,其輸出的電壓和封裝垂直方向磁場呈線性正比。在正常運行時,元件最多耗用10毫安培電流,並能偵測到雙極或單極的可變增益磁場。這個感測器的好處在於類比輸出電壓,可輕易加入到已量測類比數據的系統,如電流感測器或額外的類比角度感測器。AD22151置於和ADA4571維持垂直方向的位置,其輸出訊號可送至軟體,藉此感測轉軸徑向磁鐵的360度動作。
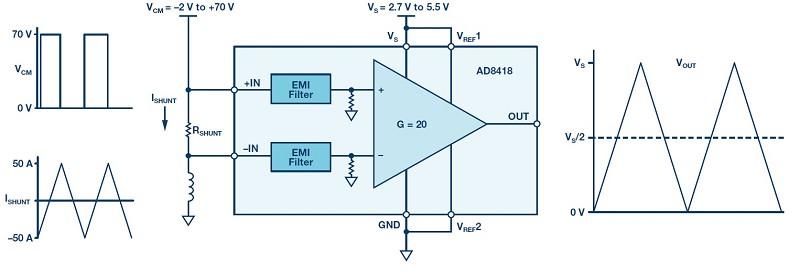
連同角度感測器,感測FOC需要精準量測經過BLDC的相位電流。AD8418是一款雙向零漂移電流感測放大器,適合執行這方面的任務。這款外接式分流放大器在操作溫度範圍內的增益為20 V/V,共模拒斥範圍為–2 V至+70 V。
這款放大器還能感測經過分流器的雙向電流,在為BLDC量測相位電流時特別有用。這款元件設計用來支援2.7至5伏特的電源電壓VS,類比輸出電壓集中在VS/2。若是選用5伏特,則輸出可集中在2.5V伏,就像ADA4571一樣。
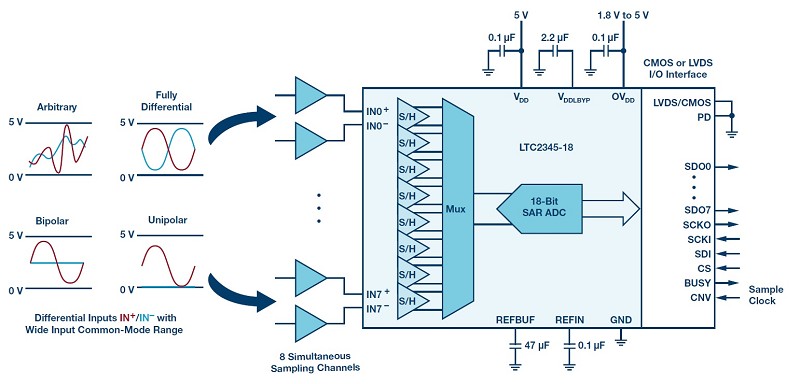
在類比輸出感測器方面,結果必須轉換成數位格式。雖然市面上已有眾多ADC產品,LTC2345特別適用在馬達控制,因為它擁有8個同步取樣通道。取樣為和轉換曲線的上升段進行同步。相位電流以及絕對角度感測器的輸出訊號,會與中央對齊PWM的時間進行同步。單一5伏電力不僅能簡化電源供應器的設計,而且消耗的電流仍低於20毫安培。
獨立的數位邏輯輸出電壓讓LTC2345能連結較低電壓的微控制器、處理器或FPGA。由於類比輸入範圍具有彈性,故能使用(IN–)類比輸入通道自動移除位置與電流感測器的2.5伏偏置。資料可使用LTC2345的時脈,利用可變時脈的SDO輸出,視所需的取樣吞吐量選用適合的時脈。
總結
隨著BLDC在控制制動系統日趨普及,使得業界需要更先進的演算法、感測器、以及驅動電路。正弦波與FOC兩種換相策略能精準控制無電刷直流馬達。兩種策略都需要精準量測BLDC轉子角度,但若沒有適合的元件,這些量測工作會很難進行。
幸運的是,ADA4571 與AD22151能簡化這方面的量測工作。而LT1158 為BLDC的3個相位簡化 PWM 驅動電路,主要可藉由減少PWM線路以及省略空白時間的計算。AD8418則簡化繞組電流的作業,另外LTC2345則能輕易對多個類比感測器的輸出訊號進行數位化與同步化。
(本文作者Charles Frick為 ADI 航太及防務部系統應用工程師)