全球服務型機器人市場快速成長,根據國際機器人聯盟(International Federation of Robotics,IFR)資料顯示,2017年全球個人/家用服務型機器人市場規模約有21億美元,較2016年成長27%。其家事類服務型機器人銷售量約占整體七成,有近610萬台的規模,成長率相較去年31%。而娛樂型機器人銷售量則占整體三成,約為240萬台,較2016年成長12%。

| 圖1 : 全球專業服務型機器人市場銷售成長,未來發展潛力雄厚,而要掌握此商機,3D感測與建圖定位將是兩大關鍵技術。(source:International Federation of Robotics) |
|
2017年全球專業服務型機器人市場銷售額約為66億美元,相較於2016年則成39%,在出貨量上,2017年出貨量超過10萬台,相較於2016年的6萬台,2017年大幅成長85%。然而,全球專業服務型機器人市場銷售量大漲85%,其銷售額卻成長39%的原因,主要是高價機器人成長趨緩,如國防機器人、水下機器人等銷售量放緩,且此類機器人生命週期可達10年之久,部分可能都還在運轉中未除役,因此對於銷售額貢獻較少。而如物流系統機器人雖銷售量成長高達162%,也占整體事業服務型機器人高達63%的比例,但由於價格相對較低,對於銷售額提升的幅度仍相對較小。
3D感測應用多元
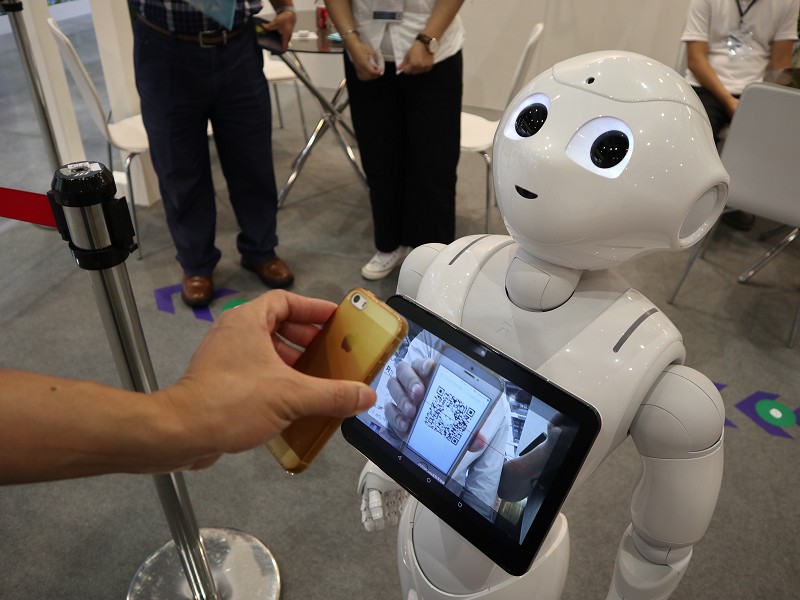
在目前的服務性機器人中,3D感測與建圖定位是兩大關鍵技術。3D感測技術由於人臉辨識應用場域廣泛,因此依據每次辨識人數大致分為兩大類:「單次多人與「單次單人」。

| 圖2 : 機器人必須擁有3D影像,才能精確判斷環境周邊的物件位置。(source:KUKA Robotics) |
|
「單次多人」偏向出席統計(Attendance),多為監控所使用,不會受限制的進出,但是會讓管理者(如保全人員)得知場域中可能存在什麼樣身分的人。如大陸所推行的「天眼」,即為單次多人的應用;「單次單人」為門禁系統所使用,其概念即過濾每一位進出的人是否為授權者,以及其授權的程度,如公司的員工與訪客可以進出的場域授權不同。
單次多人與單次單人的應用場域相當不同,單次單人存在著「關門」機制,即每一位需要進入的人都需要通過辨識,才得以進入,其安全性高,並可過濾不在授權名單內的阻生人進入該場域,因此可掌握每一位進出人員的身分並且準確性高;而單次多人則沒有「閘門」機制的限制,故被更廣泛的使用在公開場域,由於沒有通關機制,因此人在不知情的情況並不會配合辨認(如停下腳步,與面對攝影機),其準確率相對較低。
現在「單次單人」辨識導入辦公大樓、企業總部、租貨辦公室、實驗室、機房、產線、以及各式VIP貴室的應用範例正在快速成長;而「單次多人」辨識除了被安防監控、保全業者與政府機關引用進各式場域中,也逐漸被服務業者使用來輔助服務人員確認客戶身分。
以門禁系統為例,根據研究報告指出,2019年預估市場為45億美元,其中有將近20%使用生物辨識,即有近10億美元的市場,便利性、效率和安全性是人臉辨識技術重要興起的原因。臉部辨識技術應用於門禁系統與安防監控發展上,仍存在許多關鍵突破點。
近期台灣的立普思公司的多維融合(2D+3D)辨識、具備多光譜防偽、以及AI深度學習之「單次單人」人臉辨識系統,與同樣使用3D技術的Apple FacelD都有高精準與快速辨識特點,並一舉突破使用者限制至2萬人(iPhone之FacelD僅可註冊最多2位使用者),就大幅降低企業需要大量登錄與管理使用者的難度。
產品瞄準高安全性區隔之場域,進行身分查驗、黑/白NIP名單過濾、權限認證、以及打卡等重要工作。另外,立普思也利用深度攝影機感測影像和人形輪廓辨識技術,開發照護系統,兼顧被照護者之隱私和不干擾其日常生活行動,以減輕照護者的負擔和減少被照護者離床跌倒的風險。
以視覺影像的感測技術為基礎,現在已有身體姿態改變分析、靜態追蹤以及3D頭部動作分析,可適用於更多不同的環境與檢測項目,現階段甚至能利用深度學習來達到更精準的偵測,且以3D影像取代傳統2D影像監控更能增加保護受測者的隱私。
就應用面來看,此系統可應用於長照中心或病房,隨著在宅養老的觀念推動,將來更可以用於居家照護。將設備架設於有跌倒風險的場域,當病患或長者在離床時可以通報照護者,及時給予被照護者協助以降低跌倒風險。照護人員在平時或夜間也能透過遠端的影像,得知被照護者是否安睡或離床,將干擾降到最低,倘若病患長者如廁時間太久,也能通報照護者,隨時關心被照護者之狀態。
此外,基於對行為的長期分析和預測模型的建立,更能做到ADL(Activities of Daily Living)日常生活活動量的評估,及早發現長者的失能狀況,讓照護或復健的規劃更完備。
建圖定位技術仍有成長空間
至於建圖定位技術的發展與應用,在人工智慧快速發展下,服務型機器人已漸漸進人我們的生活,改善周遭環境。而這些機器人仍有移動問題須被解決,也就是在全場景的移動能力。這些場景是指機器人存在,並與其相互互動的周遭環境。而機器人應用場景決定了機器人應用難度及所需技術層次。
應用場景主要可分為兩個維度分析,即機器人的行進速度和環境的結構化程度。環境越結構化、機器人移動速度越低,則其應用場需求就相對越單純,所需技術層次就較低,如家用掃地機器人;環境越非結構化、機器人移動速度越高,則其應用場景就相對的複雜,所需的技術層次就較高,就像自駕車應用。
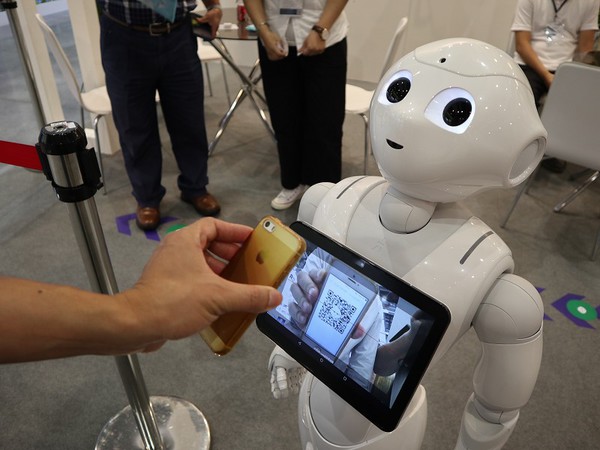
| 圖3 : 服務型機器人與周邊科技的結合越來越深,其應用也漸趨多元。(攝影/王明德) |
|
就多數的服務型機器人而言,是屬於結構或結構與非結構間、低速,而且對人機互動的人性化場景要求較高。服務機器人全場景移動能力主要的靈魂就是機器人核心演算法,包含建圖及定位、環境感知、路徑規劃及運動控制。其中建圖及定位是告知機器人位置,環境感知是讓機器人了解身處的環境,路徑規劃及運動控制是告訴機器人要去的路徑與其方式。
就建圖與定位,最常用的技術是SLAM(Simulaneous Localization and Mapping),SLAM是機器人根據感測器的資訊,一邊計算自身位置,一邊構建環境地圖的過程,解決機器人等在未知場景下運動時的定位與地圖構建問題。目前,SLAM的主要應用於機器人、無人機、無人駕駛、AR、VR等領域。
由於感測器種類不同,SLAM主要分為雷射LDSSLAM和視覺VSLAM兩大類。其中,LDSSLAM比VSLAM起步早,在理論、技術和產品應用上都相對的成熟。基於視覺的VSLAM方案目前主要有兩種實現路徑,一種是基於RGBD的深度攝影機,比如Kinect;還有一種就是使用單鏡頭、雙鏡頭或者魚眼攝影機,整體而言,VSLAM目前尚處於技術研發期,應用場景的拓展則有待產品成熟,不過隨著各大廠商的競相投入,未來發展潛力仍然雄厚。