傳統市面上販售的乒乓球發球機,發球位置固定變化性小,忽略了與人對打時球路線以及球種的多變性。為了增加發球機的性能,本作品以Delta機器人為發球機本體設計一台具有多種出球點,底座步進馬達的轉動可調整方位角,伺服馬達控制出球仰角,兩組發球馬達轉速控制調整球體速度、球體旋轉以及球路皆可自由控制之發球機。同時為了增加發球機之真實度,在球拍上安裝之加速度計,以藍牙傳輸回傳揮拍訊號,系統判定擊球方式以及角度後,才進行對應之發球動作。使用者亦可使用手機軟體控制此機器,依照個人需求設定不同的練習腳本。本作品所有控制系統皆以一顆盛群先進微控制器HT32F1765完成,提供多種球路達到跟真人對打時的擬真性。
前言
傳統發球機使用模式侷限於三種常見功能模式。固定模式:球種、落點、速度可事前定義,重複相同動作。自動模式:隨機選擇發球球路,球路變化性大,但有可能發出不合常理的球種。記憶模式:類似固定模式,依照個人需求製作發球腳本,可以組合出多種不同的練習狀況。然而市售具備此種功能的發球機不僅價格昂貴,一般家庭難以購買練習,再複雜的腳本式發球流程,經過幾分鐘的練習之後就會習慣機械化發球動作感到枯燥。
本作品不僅可以精確調整兵乓球發球的仰角、方位角、發球速度及旋轉方式。為了增加發球時出球點的多變性,本作品發揮Delta機器人的特性,以三顆伺服馬達和支架結構,在很小的空間內使發球機任意調整出球點。增加球拍上微型加速度計回傳三軸G值,判定揮拍速度及擊球角度,更能提升對戰的真實感。由於現在智慧型手機的普及,我們設計發球機控制的APP,讓使用者可以依自己所需練習的球路做設定,介面簡單,讓使用者練習時更便利。本作品發揮盛群先進微控制器內的功能與特性完成發球機所有馬達控制、角度計算、傳輸、通訊等工作。作品完成度高,相當適合家庭休閒、學校練習、專業訓練使用。
工作原理
下圖為本作品之系統架構圖,主要以盛群HT32F1765晶片為主控制器,配合機電結構達成各種不同角度的發球動作。
Delta機器人出球點可變發球結構
利用正向運動學來推算移動平面時,Delta機器人如何去達到指定位置得動作。利用逆向運動學配合正向運動學算出的數值推算伺服馬達移動之角度。
本作品將正逆運動學公式實現於盛群微控制器,計算伺服馬達角度來帶動Delta機器人的支架,讓發球頭可以在同一平面的任意位置移動,搭配自製的發球機構。該伺服馬達控制方式為脈波寬度調變,利用脈寬與角度的關係來控制機器臂上升或下降。如下圖所示,本作品以三顆伺服馬達控制發球機構正面平面移動的功能,達成出球點可變的創新功能。
步進馬達控制原理
在發球機底座安裝步進馬達,控制其旋轉角度,即可控制其發球角度可調的功能。
球速及旋轉方向控制
控制兩個直流馬達的轉速來控制發球的快與慢,直流馬達一個轉與一個停止來控制球的旋轉方向。機構上的小馬達可以變化出直球、快速球、慢速球、左旋球、右旋球等球路。(圖4-1)
發球仰角與送球時間點控制
利用伺服馬達控制發球頭的仰角位置,使球發出時,可以有高拋球和殺球的效果。本作品將電磁閥放置在發球機構裡,當電磁閥收到訊號時,推動電磁閥的一端,將兵乓球推出。(圖4-2)
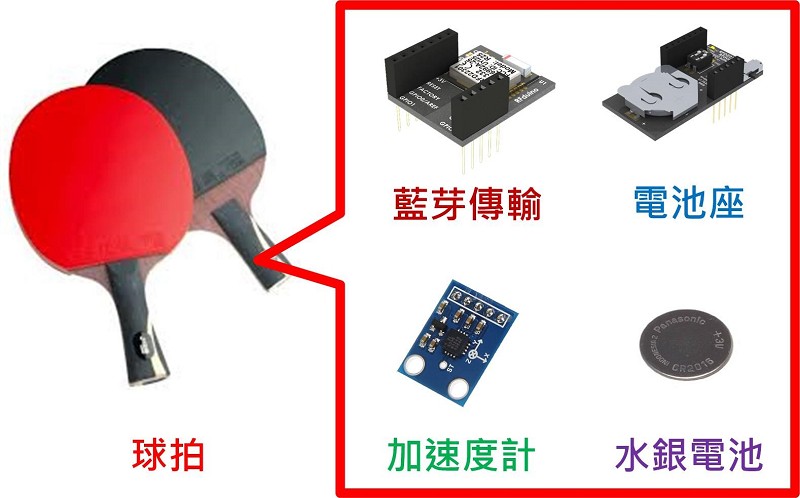
三軸加速度感測器
利用三軸加速度感測器偵測到的值,來判斷使用者揮拍時的動作,藉此發送相應球種給使用者。以RFduino的藍牙通訊功能,藉此達到快速的傳送球拍訊息給盛群晶片HT32F1765做判斷可能的姿勢,回以最合理的球種。(圖4-3)
APP軟體控制介面
本團隊開發一套手機應用程式提供使用者設定發球的腳本及發球的球速、角度和旋轉方向之功能,讓使用者可依自己喜好來控制發球方向。使用常見的手機作為控制介面可簡化設計,並節省硬體成本。
作品結構
微控制器
盛群晶片HT32F1765:接收手機和RFduino的藍牙訊號,然後計算正逆運動學來推算伺服馬達的角度,藉以達到Delta機器人的平面移動,並且發送信號給直流馬達、步進馬達及電磁閥來控制發球的角度、速度和方向。
伺服馬達
伺服馬達用於Delta機構控制與發球仰角調整。此控制方式為脈波寬度調變,利用脈寬與角度的關係來控制上升與下降,當脈波寬度為0.9ms時,馬達軸承位置往右旋轉約135度,當脈波寬度為2ms時,則往左至中心線,脈波越長,角度越大。此伺服馬達具備高扭力與高轉速,能夠於1秒內控制發球的變換,其扭力為16Kg/cm。(圖5-1)
直流馬達控制模組
直流馬達裝置於發球機構兩側,使用直流馬達的好處就在於不受電源頻率限制,速度控制只需透過改變電壓即可,此馬達再透過馬達驅動器(L298N)使得其正反轉。主要將兩組橋式電路封裝成晶片,並加上穩壓IC,驅動兩顆直流馬達並控制轉速。L298N馬達驅動板具備I/O腳、地線與電源輸入與輸出,馬達連接端子。馬達工作電壓輸入、地線、5V電源輸出。一組馬達可使用兩隻腳位來控制正、反轉及轉速。(圖5-2)
步進馬達控制器
本作品步進馬達所用型號為DM6088E步距角度為1.8度。裝置於發球機構底層並控制其為五種角度變化使得發球機構不再是單一方向做發球,並加上M542驅動器,M542驅動器適用於驅動2相和4相混合式步進電機。此驅動器採用交流伺服驅動器的電流環進行細分控制,電機的轉矩波動很小,低速運行很平穩,幾乎沒有振動和噪音,高速時力矩也大大高於其它二相驅動器,且定位精度高。(圖5-3)
電磁閥
裝置於發球機構內部,中心是由銅線圈組成,透過盛群晶片,收到訊號時線圈將電磁閥一端推出去。(圖5-4)
三軸加速度感測器
ADXL335 三軸加速度感測器包含多晶矽表面微加工傳感器和信號調理電路,輸出信號為模擬電壓,與加速度成比例。將加速度感測器裝置在球拍上,可以測量三軸(X、Y、Z)空間球拍產生的靜態重力加速度及擊球時的衝擊或振動導致的動態加速度,藉由球拍移動改變的數值,來決定發球機所要回應的球路。
RFduino穿戴式藍牙傳輸模組
利用RFduino內的藍牙4.0模組來傳輸球拍的值和APP訊息。球拍感測到加速度的變動值時,就以藍牙傳輸給予盛群微控制晶片。
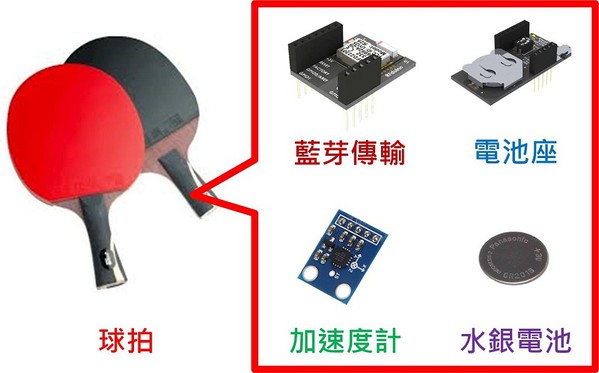
| 圖6 : 三軸加速度計與RFduino藍牙4.0模組 |
|
測試方法
硬體系統安裝
本作品共有六處需要安裝連結,分別是電源供應器、直流馬達控制器、步進馬達控制器、伺服馬達、電磁閥,均連接完成後,電源供應器插上插座即可供電使用。
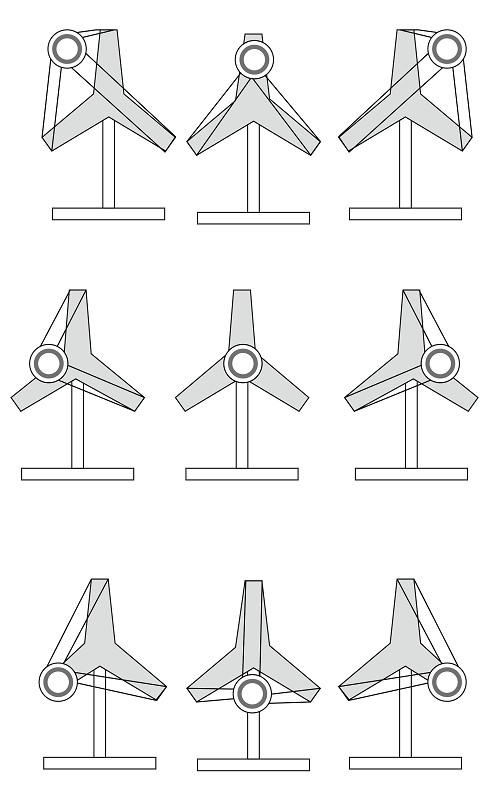
Delta機構不同發球點測試
利用伺服馬達控制Delta機器人的手臂,隨後Delta機器人移動至指定平面位置。圖14為發球機經由角度計算將伺服馬達偕同移動,將發球機構調整之不同的出球點,讓發球的角度有不同的變化。除此八個位置外,在機構延伸範圍內的所有角度都可以到達,且經度相當的高可以任意改變。
直球、 左旋球、右旋球
當直流馬達控制器接收到HT32F1765晶片直球、左旋球、右旋球信號時,直流馬達控制器使二顆馬達一起轉動時發送直球,使一顆馬達轉動一顆靜止達到左右旋球之變化,測試方法為將球放入發球機構中,發球機可發出不同球路的球。
變換方位角發球
當M542步進馬達控器接收到HT32F1765晶片信號時,控制步進馬達轉動,藉以達到改變發球方向,如圖所示。
電磁閥控制發球數
當電磁閥接收到HT32F1765晶片送球信號時,會啟動電磁閥縮放功能,藉此達到控制發球時機及發球數,如圖10-1所示。
發球仰角變化
位於發球機構下方的伺服馬達可控制發球機構仰角,可經由脈波調變控制仰角角度。如圖10-2所示。
APP介面測試
利用APP介面來控制所有發球的種類、方向和角度。使用者設定好之後,手機就會經由藍牙將設定傳輸給發球機,接下來發球機就會按照此設定進行發球。如圖10-3所示。
使用者揮擊感測測試
利用球拍上的加速度感測器,並經由RF duino傳送給盛群晶片HT32F1765進行判斷。當使用者擊中球後,發球機將會發出對應的球製造回擊對戰的實戰感受。
(本文作者陳智勇為樹德科技大學電腦與通訊系教授,李炫輿、林子涵、夏瑞毅、張哲綸為樹德科技大學電腦與通訊系學生)