随着自动化的周边技术进步,小型扫地机器人的导航方式也不断提升。而机器人的航位推测法,就是最新的关键技术。在导航中,航位推测法是从已知的起始位置开始,搭配随时间改变的内部速度和前进方向估算,来估测出一个位置,其中不需要任何外部叁照物。用於机器人航位推测法的典型感测器包括用滚轮旋转来估算速度的滚轮编码器、根据观察到的地板样式来估计速度的光流感测器 (类似电脑滑鼠中使用的感测器),以及测量面向位置和加速的 IMU。航位推测法是由这些感测器提供的综合资讯所计算而成。

| 图一 : 小型扫地机器人的导航方式也不断提升,而机器人的航位推测法,就是最新的关键技术。 |
|
这些航位推测法的运算法已实际应用在机器人中,并且逐渐超越知名的随机漫步 (在地板上以看似随机模式移动的机器人)。这些机器人会运用智慧漫步,这是一种更先进的清洁方法,即利用航位推测法依照经计算的模式移动。航位推测法是它们导航资讯的主要来源,也能让这些机器人更有效地清洁表面,并节省电池寿命。对消费者而言,它能有效清洁以节省时间;对於 OEM 厂商,它不需要 LIDAR 或昂贵的相机 (在 VLAM 系统中),进而节省 BOM 成本。
即使是在更先进的 VSLAM 和 LIDAR 系统中,航位推测法依然占有关键地位。VSLAM 式解决方案仰赖相机来计算机器人的位置。相机通常指向前方或上方的角度,找出各种边缘或物件来定位其位置。但是,如果机器人进入光线不足的区域 (如床底或沙发下),就会失去可利用的视觉线索,因而迷路。进入没有特别装饰的房间 (譬如四面皆是白色墙面) 也会发生同样的状况。当机器人越过门槛或叁差不齐表面时,LIDAR 系统会遗失资讯,创造出同样不均匀的世界。航位推测法填补这些关键时刻的定位空白资讯,并维持正确的路线。
各感测器的用途与挑战
航位推测法似??可以透过自动化导览解决许多问题,这点毫无疑问,但航位推测法本身并非没有难题待解决。随着时间流逝,由於内部估计误差 (速度和面向位置),透过航位推测法计算出的位置将偏离真实位置。每个感测器都会有影响输出准确性的自身状况。
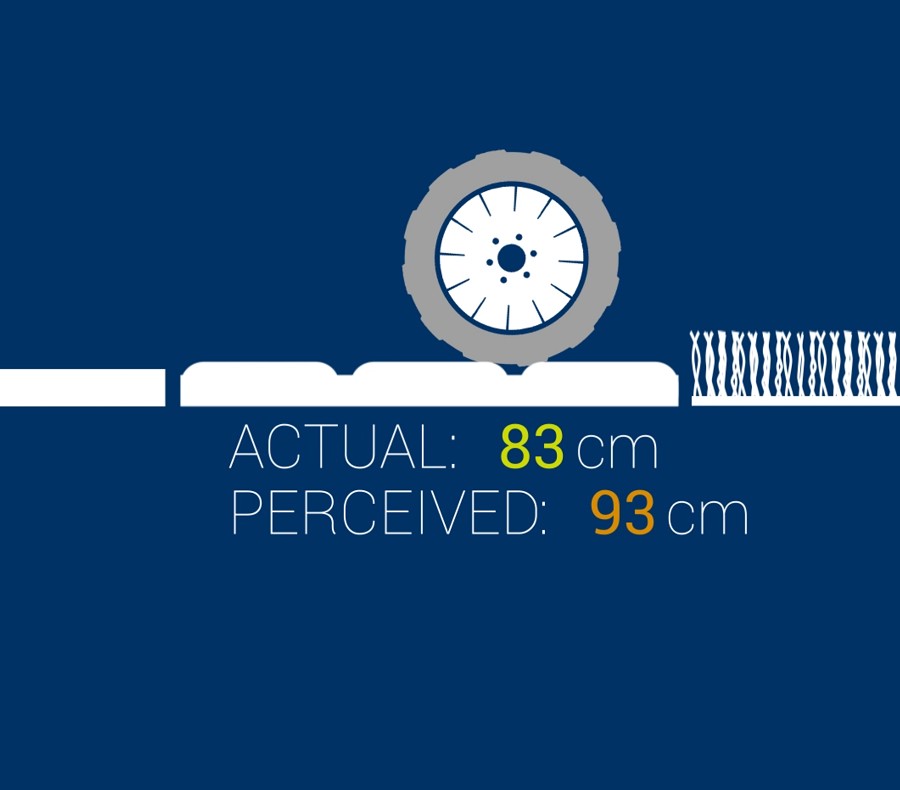
滚轮编码器虽然可以追踪滚轮的旋转状况 (以轮轴为中心移动的距离或速度),并直接转化为线性位移。但这是最理想的状况。在现实世界中,滚轮可能会因为软质表面和地表变化而滑移或打滑。在这些滑移或打滑期间,滚轮会比机器人移动得更远或更近。滚轮编码器的读数会准确反映滚轮的行为,但那并非机器人的确切位置。
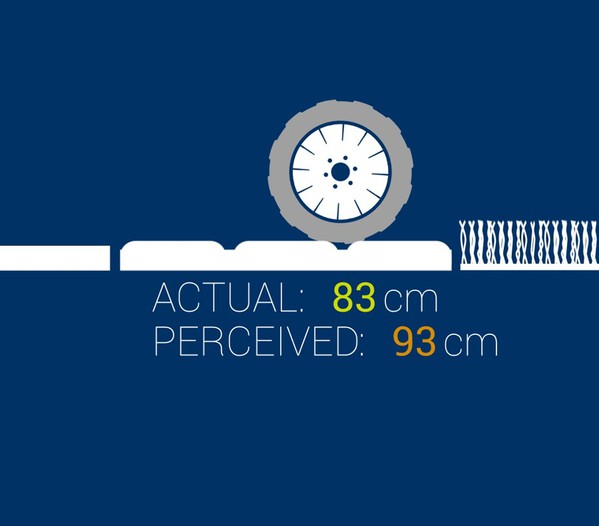
| 图二 : 实际数目:83cm ; 被察觉的数目: 93 cm |
|
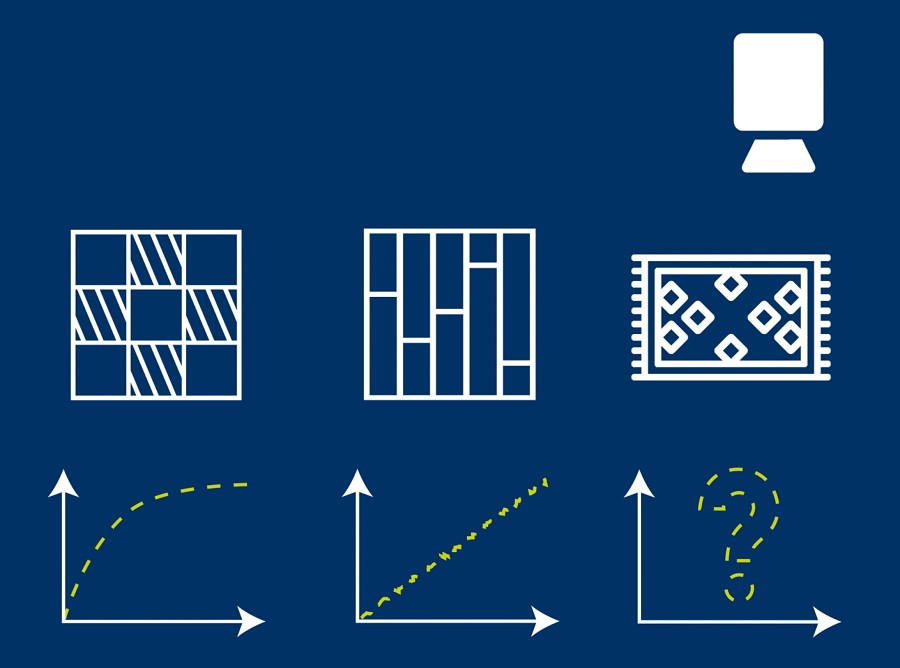
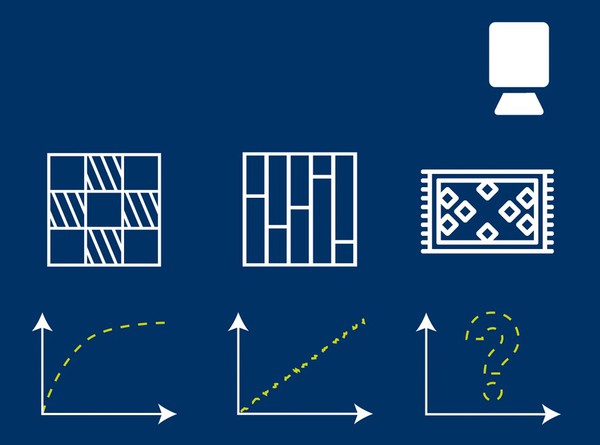
光流感测器是可以在电脑滑鼠中找到的感测器。光流感测器使用LED 或雷射光来查看其影像中的相对变化。如果影像中有特定的子像素组一起移动 (或流动),它会提供感测器整体移动方向的资讯。您的电脑滑鼠几??都会在平坦光滑的表面上使用,因此其状况和输出结果可达到稳定一致。但机器人会在不同的地板上移动,根据地板与感测器之间的高度差异及感测器的类型,提供不同的资讯。某些地板搭配 LED(较粗糙)的运作效果较隹,其他则是搭配雷射(较平坦)的效果较隹。为了让机器人从光流感测器取得最隹资讯,校正感测器以配合地面高度和地板种类可说是至关重要。
| 图三 : 惯性量测单元(IMU)会测量加速度和角速度,并转换为前进方向和倾斜资讯。 |
|
惯性量测单元(IMU)是正如其名专门设计的感测器。它们会测量加速度和角速度,并转换为前进方向和倾斜资讯。我在前一篇文章提到,面向位置的准确性对机器人来说很重要,因为这样才能找出前进的方向。倾斜资讯有助於防止机器人往墙面上爬,或因为椅子太高而卡住。IMU 对感测器一致性方面有其挑战。它们会受到温度影响,需要校准才能正确使用。
结合一切要素
为了建立精确的航位推测演算法,每个感测器都必须经过校准,以提供精确的资讯。这项工作本身就有其难度,而要让这些感测器互相融合更增添了复杂程度。藉由比较滚轮编码器资讯和 IMU 和光流感测器,可侦测到滑移和打滑的情况并忽略相关资讯。同理,光流法也可以透过比较其流向与滚轮编码器预期的线性动作来进行动态校准。利用 IMU 来检查在平滑表面上的一致性,可提高对测量的信心程度。除了持续监控温度对於性能的影响,这也能维持对感测器的掌控。感测器融合的价值在於随时了解哪些感测器资讯最值得信赖,藉此尽量展现最隹成效。如您所见,尽管我还未全部列举出来,但航位推测法的程序已包含许多复杂议题。
航位推测法是强大的工具,可用於任何地面模式的机器人,比起进阶的 VSLAM 或 LIDAR 系统更能展现高效率。它可以利用智慧漫步缩短清洁时间,也可以在不良的环境之下,为复杂的 SLAM 演算法增加韧性。精心结合滚轮编码器、光流感测器和 IMU 来实现航位推测法。当您发现在地板上看似简单的清扫模式竟是如此复杂程序的成果,可能会大吃一惊,但您所看到这些流畅的成果,正是许多感测器和感测器融合所实现的心血结晶。在此情况下,至少总体是大於个体的总和。
(本文作者Charles Pao为CEVA 感测器整合事业单位资深行销专员)