在五年前,一輛全新的汽車可能包含大約60到100個感測器。在今天,這個數字實際上更接近200或更多。隨著車輛不斷變得更加智能和自主,感測器的發展和復雜程度也跟上了步伐。例如,傳統安裝在車輛上的大型LiDAR變得更小、數據更多、效能更高,同時提供更高的解析度。但是,比感測器類型本身更大的進步是能夠獲取來自多種感測器類型的數據,並在強大的計算平台上對這些數據進行網格化。
隨著自動駕駛汽車產業的不斷發展,技術供應商和汽車製造商需要考慮邊緣運算能力、感測器融合、感測器退化、監控以及車輛生命週期內軟體維護與服務之間的成本及性能平衡。
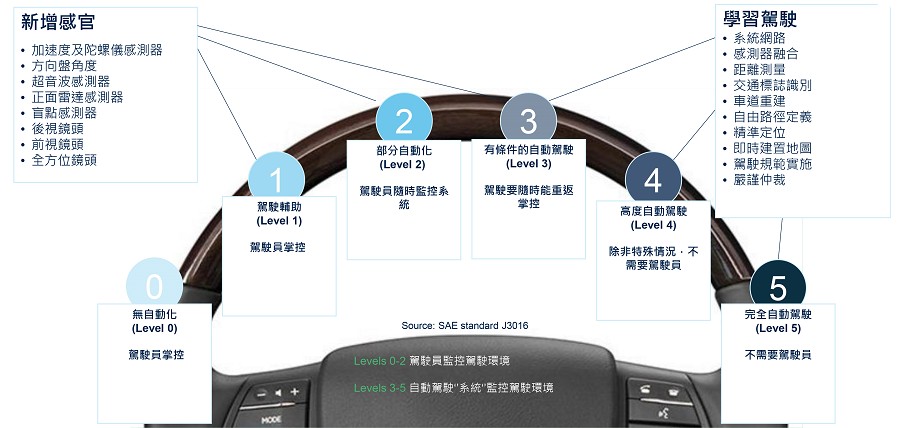
| 圖一 : 汽車自動化的五個層級,需要具備不同的感測能力。(source:st.com) |
|
車輛環境感測器
汽車製造商和原始設備製造商面臨的最大挑戰之一,是跟上感測器和數據開發的快速步伐。感測器需要為車輛系統提供必要的數據保真度,以滿足設計要求。例如,如果駕駛市場上任何最新的車輛,它們的感測器將尋找車道標記,並在必要時提供車道的視覺提示。
這些類型的功能很有幫助,但在自動駕駛汽車方面仍然屬於相對初級的能力。在道路上有大量司機、行人、騎自行車者和摩托車的人口,在稠密的大都市地區行駛,需要車輛在瞬間做出停車或轉向的決定,以避免撞到行人或其他車輛。感測器融合開始在這樣的領域發揮作用,做出人類駕駛員在高級駕駛輔助(ADAS)系統做出反應之前,可能無法做出的決定。
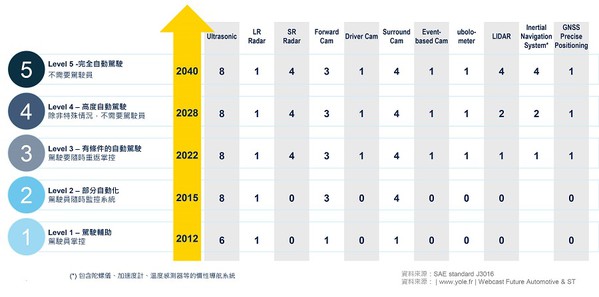
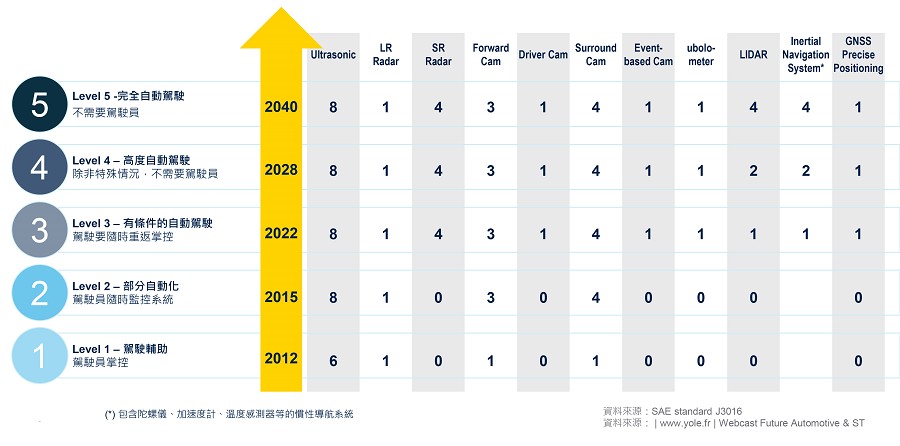
| 圖二 : 汽車自動化對於感測器的需求逐年增加。(source:st.com) |
|
為了實現ADAS功能和自動駕駛,如今的汽車配備了越來越多的環境感測器,例如雷達、攝像頭、超聲波和激光雷達等。然而,每個感測器本身都有其侷限性,不能單獨提供有關車輛環境所需的完整信息,以執行安全功能。透過結合來自各種感測器的輸入,可以有足夠的信心生成完整的環境模型,以啟用ADAS功能或自動駕駛功能。作為可以做出關鍵自主決策的自動駕駛系統的一部分,感測器融合系統的設計必須滿足最高的安全和安保標準。
整合多項感測數據
感測器融合是將來自多個雷達、激光雷達和攝像頭的輸入匯集在一起,以形成車輛周圍環境的單一模型或影像。生成的模型更加準確,因為它平衡了不同感測器的強度。然後,車輛系統可以使用透過感測器融合提供的資訊,來支援更高智能的車輛運作。
每種感測器的類型(或模態)都有其特定的優勢和劣勢。雷達在準確確定距離和速度方面非常強大,即使在具有挑戰性的天氣條件下依然如此,但卻無法讀取路牌或辨別紅綠燈的顏色。而相機可以很迅速地讀取標誌或對物體進行分類,例如行人、騎自行車的人或其他車輛。然而,它們很容易被泥土、陽光、雨、雪或黑夜所蒙蔽。激光雷達可以準確地檢測物體,但它們沒有相機或雷達的視線範圍或可負擔性。
感測器融合將來自各種感測器類型的數據匯集在一起,使用軟體演算法來提供最全面、最準確的環境模型。它還可以透過稱為內部和外部感測器融合的過程,與駕駛室內部的數據進行連結。
車輛可以使用感測器融合技術,來整合多個相同類型感測器(例如雷達)的信息。這可透過部分重疊的視野來改善感能力。由於多個雷達觀察車輛周圍的環境,因此將有多個感測器同時檢測物體。通過360度感知軟體來進行演算並解讀,來自多個感測器的數據就可以重疊或融合,以提高車輛周圍物體的檢測概率和可靠性,並產生更準確和可靠的環境狀態分析。
在自動駕駛汽車的情況下,傳統上將來自各種感測器的信號傳輸到中央運算處理器,以估計物體(即人類、動物、其他汽車等)的位置和類型、物體的速度。物體正在移動,而移動的軌跡將有助於做出導航的決策。
邊緣運算使車輛能夠在資訊來源(即感測器本身)附近即時進行分析運算,而不用將資訊再中繼到中央處理器去,進而可以減少延遲並實現更即時的處理。汽車擁有的邊緣運算感測器數量越多,實時響應的能力就越好,儘管如此,這卻也增加了解決方案的成本和整合的復雜性。
解決感測器退化問題

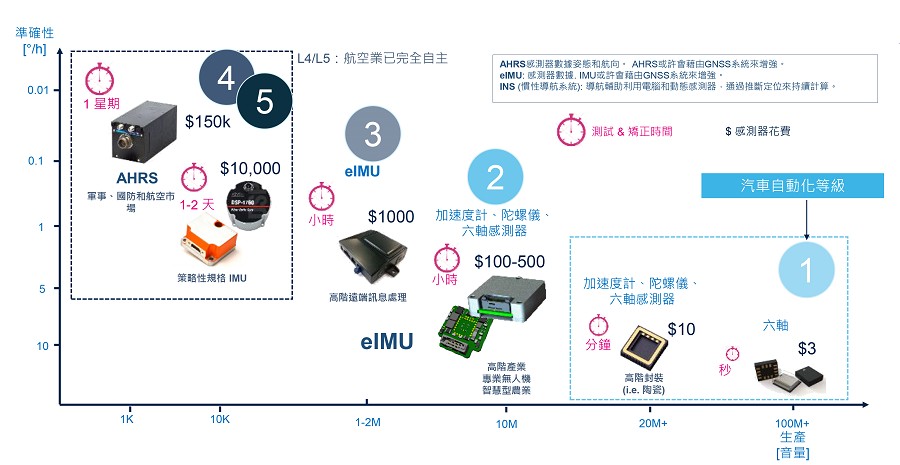
| 圖三 : 汽車對於先進感測器融合的採用,大致分為三個不同的階段。(source:st.com) |
|
感測器退化是自動駕駛汽車都會發生的狀況,特別是考慮到當今汽車的使用壽命通常為10到15年。退化的主要原因包括感測器的一般磨損、惡劣的操作環境,以及其他電子系統元件的退化等。
此外,還有來自環境因素的臨時感測器退化,例如阻礙相機視野的直射陽光,或擁擠區域中的高射頻(RF)噪聲。為了防止這種退化,汽車製造商通常會安裝多種類型的感測器,為ADAS子系統來提供額外的資訊,以便做出更好的決策。
就元件的逐漸退化而言,汽車製造商和技術供應商必須考慮已安裝的感測器(如LiDAR、攝像頭、超聲波等)的能力,使其在整個預期過程中的性能與開始時相同,甚至更高於車輛的使用壽命。
此外,他們還必須瞭解如果感測器開始出現故障時會發生什麼事情。車輛如何提醒駕駛員它需要進行維護,另外在車輛維護完成之前,是否會自動暫停其自動駕駛能力?隨著自動駕駛汽車變得越來越普遍,將會有更多的法規和各種消費者習慣陸續發揮作用,這將有助於塑造自動駕駛車輛的未來市場。也許每三年更換一次車載攝像頭會成為一種必要,就像消費者需要定期更換輪胎一樣。
網絡安全和汽車感測器
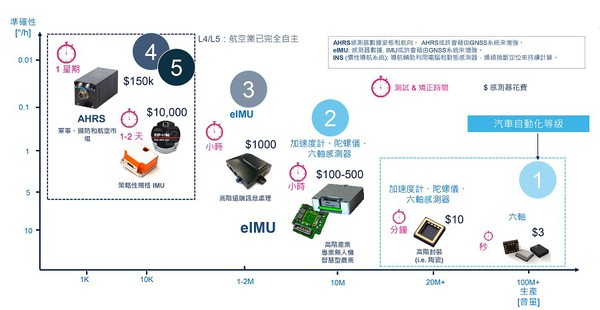
| 圖四 : 今日的慣性導航系統多軸感測器整合趨勢。(source:st.com) |
|
在確保自動駕駛汽車感測器安全時,需要考慮幾個不同的因素。入侵系統始終是一個問題,需要在軟體和硬體設計階段就加以解決。
另一個不太明顯的安全因素,是影響車輛中的機器學習技術中,使其無法正確做出分析。在一項研究中,研究人員導入了一個視訊廣告看板,該廣告看板已被篡改,在短短幾分之一秒內就顯示停車標誌。自動駕駛汽車會感應到停車標誌並進行停車,因為它們能夠捕捉到該影像並對其做出反應,就像他們在道路上感應到停車標誌一樣。
隨著這些設備的複雜性和功能的增加,發生網路安全攻擊的不同途徑也將按比例增加。設計師和汽車製造商將不得不找到一種方法,來更新他們的防禦並管理這些類型的意外反應,防禦的一部分是透過一個強大的生命週期管理軟體程序,以防止這些非傳統的網路攻擊。
結語
一部智能化的現代車輛都有數萬行運行代碼,汽車供應商需要在車輛的整個生命週期內,從軟體安全的角度管理並開發車輛,以確保其能持續像是第一次上路那般的安全行車(甚至更好)。而同樣的理念也適用於感測器本身的物理性能,以防止元件的退化。跟上感測器融合領域的所有進步是具有挑戰性的,但也是有益的,因為未來,我們將持續看到自動駕駛汽車成為市場上的主流。