協作機器人是目前自動化領域的當紅炸子雞,正快速的進入各式各樣的工業應用情境中。而且不同於傳統的工業機器人與機器手臂,協作機器人並不往大型與重機具領域發展,而是以中小型的應用領域為主,理由很簡單,它們是要在一定的工作空間裡,與人類一起協作。

| 圖一 : 協作機器人的安全設計前提,是要防止與工作人員產生碰撞的意外,並避免造成「疼痛」與「受傷」的情形。 |
|
而要與人類一起工作,協作機器人在設計上就有著非常不同的考量,所使用的科技也有別於一般的機器手臂,而最重要的考量,就是工作安全。
也因為協作機器人必須跟人員緊密的互動,安全性的考量需是產業共識,所以國際標準化組織(ISO)也在2016年3月發布了《ISO/TS15066 Robots and robotic devices--Collaborative robots》標準草案,進一步規範了協作機器人應該具備的安全性內容。該標準預計在2019年會完成審議。
ISO/TS15066規範將定案 數據化安全規定
在這個標準裡就明確指出,協作機器人的安全設計前提,是要避免與工作人員產生碰撞的意外,並防止因此造成「疼痛」與「受傷」的情形。而這個標準也對整個機器人產業有了根本上的影響,因為它提供了數據化的參考,並促進了新一波的科技發展。
ISO/TS15066規範有四個要點,明確定義了協作機器人需要哪些安全設計:
1.安全額定監控停止(Safety-rated monitored stop):在不移除電源的情況下,協作空間內不能有機器人系統的危害,而且必須能夠隨時啟動額定停止功能,而且機器人又有保護性停止的功能;
2.手動引導(Hand guiding):協作機器人必須是可手動控制的系統,允許由人直接操作;
3.速度及分隔距離的監控(Speed & Separation Monitoring):須針對機器人運行速度,以及與人的距離進行監控;
4.動力和力量的限制(Power and Force Limited):協作機器人的速度、扭矩、力量等,都必須在規定限制內,以防止人員的傷害。
從新規範的內容來看,就知道協作機器人的力量與速度是受限的,而且必須要能夠手動操作,更重要的是,要具備距離監測和防護停止的功能,因此必然要使用多樣的感測器與數控功能來達成。
在偵測力量和速度方面,就需要用到扭力感測器和速度感測器;偵測距離則需要接近感測器;至於碰撞,就會用到碰觸感測器和力量感測器。
但人畢竟不是機器,並不會有程式化固定的行為和動作,因此在產線上或者工作台上的協作機器人,必須要能夠精確的避免與人的碰撞,特別是人員突如而來的動作。
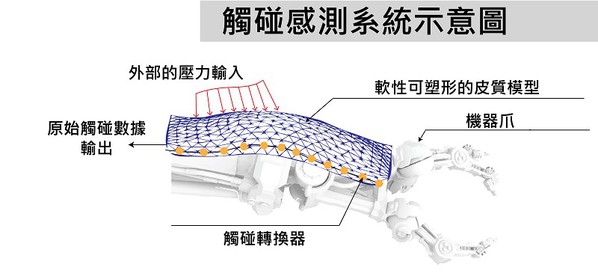
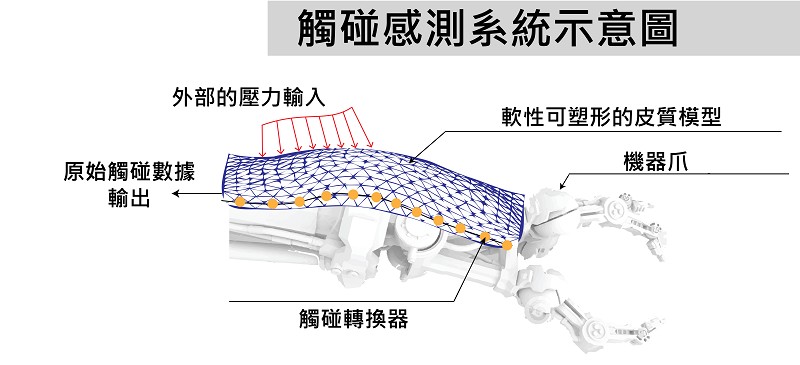
| 圖二 : 觸碰感測器系統示意圖。(source: hi.is.mpg.de) |
|
在傳統的設計上,協作型的機器人為了要避免與人的碰撞,經常會使用「接近感測器(Proximity sensor)」來防範此種意外。這類感測器主要是使用透過感應「距離」的方式來設定機器的動作,只要人員靠近到一定的程度,機具就會減速或者停止動作。
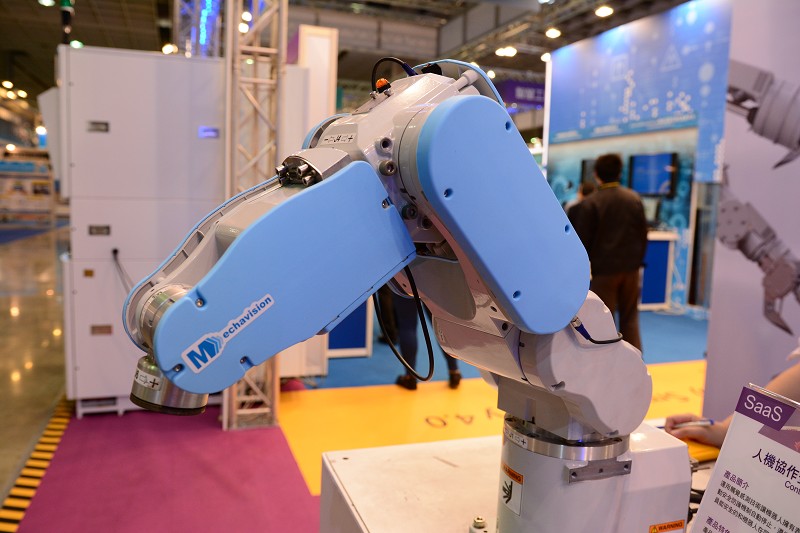
| 圖三 : 要把感測器整合到整個手臂中並不是件簡單的事。 |
|
另外,也有運用光感測的原理來設置光閘,用以區隔協作機器人與工作人員空間,只要人員接觸到光閘,就會觸發機器人的另一種工作模式,或者直接停止,以保護人員安全。
但以上這些方式都不是最佳方案,因為接近感測器的原理是透過發射電磁波或電磁場,並接收其反射的訊號,藉以判斷物體是否存在及其相對的距離。而不同類型的接近感測器,也就會有不同的感測目標,例如電容式或光電式可偵測塑料,而電感式只能偵測金屬。
其他還有靜電容量型、超音波型與磁性型等,各自的性能與應用領域也各異。也因此使用接近感測器來對工作中的人員進行感測,其設定和設計就會相當複雜,也不易達到最佳性能。
再者,下一代的協作型機器人與工作人員的互動將是十分緊密,彼此間的工作距離也就會非常接近,因此可以反應的時間和靈敏性會是一大挑戰,尤其是接近感測器難以覆蓋全部的位置,如果人員出現在死角位置,或者意外的出現,都可能會出現危險。所以增添其他的感應方案就成為不得不思考的對策。
導入「觸覺」 碰撞感測器成關鍵技術
目前最新的技術方向,是讓機器手臂更加接近人體,也就是讓它擁有「觸覺」。
不同於傳統的「請勿靠近」思維,這種機械觸覺的設計思維就顯得十分人性,它是建立在「觸碰」上。就如同人類的工人,當我們在工作中不小心碰到對方時,我們會立即把手收回來,這是一種天性。
而要實現這種偵測觸碰的科技,同樣也有多種方式,包含電容、電阻、壓電效應、超音波和力量感測等。而目前主流的發展方向,則是為協作機器人加裝上一種類似人類皮膚的安全裝置,藉以偵測各種接觸和碰撞的情況。
這種安裝在外部的安全裝置是透過內建精密的觸覺感測器,來對各式各樣的觸碰產生反應,並給予機器人停止的訊號。而觸覺感測器,一種壓力感測單元陣列的整合電路,其上的每一個單元都能夠檢測壓力,並依據壓力感測器的靈敏度與整合的密度,來提供不同的等級與應用的觸覺感測能力。
然而,要在機器手臂裡導入碰撞感測器並不是這麼簡單,它必須要顧及更多的面向才行,包含要能偵測到所有可能接觸到的物件材質,以及所覆蓋的範圍必須要具備相同的靈敏性。再者,就是感測器要能與柔性材質整合,才能符合協作機器人的工作需求。
因此,這種專為協作機器人所設計的觸控感測器就成了一種特殊的應用市場,並有特定的業者進行產品的開發與設計。例如德國Fraunhofer IFF就開發了專用的協作機器人觸控感測器系統,不僅能安裝在軟性材質上,而且能夠感應各式的壓力與碰撞;再者,該公司的感測器還能與電容式接近感測器作整合,提供雙重的安全設計思考。
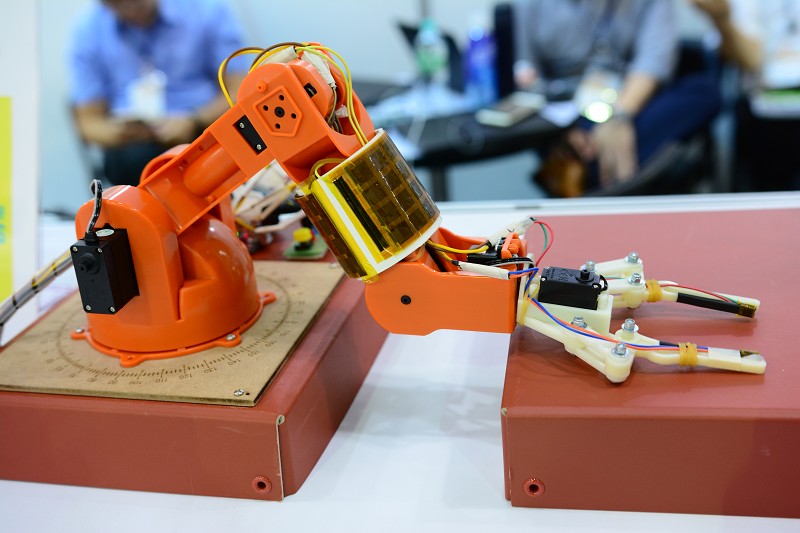
在台灣,從工研院獨立出去的原見精機(Mechavision),也是一家專門提供協作機器人碰撞偵測解決方案業者,該公司將其產品稱為「安全皮膚」,能夠安裝在機器手臂可能會產生碰撞的位置,以提供協作機器人受到碰觸即停止的功能。目前也已獲得佳世達採用,並實際運在產線上。

| 圖四 : 原見精機的「安全皮膚」,能夠安裝在機器手臂可能會產生碰撞的位置,提供碰撞感測。 |
|
澳洲的機器人安全方案供應商Blue Danube Robotics也提供類似的產品,用於安裝在機器手臂上,來提供協作機器人所須具備的安全規範。不同的是,Blue Danube的AIRSKIN碰撞感測器產品的表面是軟性材質,並且能安裝置整個機械手臂上,提供整機的觸碰和碰撞偵測功能。
除了碰撞後停止之外,觸覺感測器其實還能夠偵測力量的大小,給予不同的力量數值,讓系統可以據此設計出不同的回饋反應。對協作機器人來說,使用了這類的感測技術之後,就能在受到碰觸時,依據觸控的力道來決定是要減慢動作,或者完全停止。
當然,目前也有更前瞻、更科幻的技術發展,也就是進一步打造機器人專用的「電子皮膚」,把具備感測功能的電子薄膜直接安裝置機器人身上,讓機器人具備類人類的觸覺,不僅感應接近、接觸和碰撞,甚至還能夠有偵測溫度的功能,可以讓協作機器人的安全與應用有更多的想像。
結語

| 圖五 : 除了產線外,協作機器人也開始出現在多種工作場合上,如醫檢。(source: ABB) |
|
綜合來看,協作機器人雖然已經問世多年,但隨著新規範與新技術的導入,讓其發展有了更寬廣與更多元的方向。除了製造業的使用量逐年攀升外,甚至醫療檢測、服務業與餐飲業也開始有業者計畫導入協作機器人,來作為其提供服務和工作流程的一部分。
而在這個趨勢下,也將會帶動更多新興的軟硬體發展,尤其是在感測器的部分,因為協作機器人非常重視安全與精細的動作,而這些都需仰賴先進的電子感測元件來達成。